1.本技术涉及船上用的挖掘机,更具体地说,尤其涉及一种适用于航道整治施工装备的加长臂挖掘机。
背景技术:
2.为进一步开发河流水道,加快推动河流沿岸经济带发展,需要充分发挥河流运能大、成本低、能耗少等优势,加快推进河流干线航道系统治理,整治浚深下游航道,有效缓解中上游瓶颈,改善支流通航条件,优化港口功能布局,加强集疏运体系建设,发展江海联运和干支直达运输,打造畅通、高效、平安、绿色的黄金水道。
3.在航道整治中,常用到一种挖掘机固定在抛石船上,用于航道治理的抛石作业、水下整平夯实作业。用于航道治理的挖掘机需要刚性强度高的长臂,并且要求可以灵活更新工具头和调整定位。
技术实现要素:
4.为解决上述技术问题,本技术提供一种适用于航道整治施工装备的加长臂挖掘机,设有的大臂和小臂,内设加强筋,能承载更大的负重,同时设有连接器,可以与不同工具头配合,实现快速更换工具的头的目的。
5.本技术提供的技术方案如下:
6.一种适用于航道整治施工装备的加长臂挖掘机,包括船体、履带轮、回转平台和挖掘机,所述回转平台安装在所述履带轮机架上,所述挖掘机包括挖掘机主机、大臂、小臂、连接器和工具头;
7.所述挖掘机主机安装在所述回转平台上;
8.所述大臂的第一端与所述挖掘机主机铰接,所述挖掘机主机与所述大臂靠近第一端的机体之间安装有动臂油缸;
9.所述小臂呈“7”字型,包括短边结构和长边结构,所述短边结构的尾端与所述大臂的第二端铰接,所述长边结构的尾端通过连接器与所述工具头连接;
10.所述小臂的“7”字型短边结构和长边结构的转角处外表面设有第二铰接片,所述大臂中部外表面设有第一铰接片,所述第一铰接片和所述第二铰接片之间通过斗杆油缸连接;
11.所述大臂和小臂的主体结构均是箱体板件,箱体板件的内壁上设有沿臂长伸长方向的第一加强筋;
12.所述大臂的中空内壁上还设有方环形的与所述第一加强筋垂直的第二加强筋。
13.其中,所述工具头上设有两块平均的安装板,所述安装板之间安装有两根平行的销柱;
14.所述连接器包括基座、固定抓手、活动抓手和连接器油缸,所述固定抓手固定安装在所述基座上,所述活动抓手通过铰接销铰接安装在所述基座上,所述固定抓手和活动抓
手上分别设有连接柱,所述连接器油缸的两端分别与所述连接柱连接;
15.所述固定抓手和活动抓手的抓手部分别与所述工具头上的销柱配合。
16.其中,所述长臂上安装有大臂倾角传感器,所述小臂上安装有小臂倾角传感器,所述工具头上安装有工具头倾角传感器,分别用于实时检测工作状态中大臂、小臂和工具头的角度;
17.所述斗杆油缸和动臂油缸的进油管设有阀门调节器;
18.所述挖掘机主机上设有长臂控制器,所述阀门调节器、大臂的倾角传感器、小臂的倾角传感器和工具头的倾角传感器与所述长臂控制器电性连接。
19.其中,所述工具头是液压夹、液压夯、铲斗或抓斗中一种。
20.其中,所述斗杆油缸位于所述大臂和小臂的下方。
21.其中,所述大臂的总长为8.5-9m,所述小臂的总长为5.5-6m,所述大臂的总长是指大臂上最远的两端之间的直线距离,所述小臂的总长是指小臂上最远的两端之间的直线距离。
22.其中,所述大臂的箱体板件的厚度是16mm-20mm;
23.所述大臂最大的截面外周是边长为500mm-1000mm的长方形。
24.其中,所述小臂的箱体板件的厚度是14mm-20mm;
25.所述小臂最大的截面外周是边长为400mm-800mm的长方形。
26.其中,所述加强筋的间距是1200mm-1600mm;
27.所述加强筋的宽度是460mm,高度是700mm-900mm。
28.本实用新型提供的适用于航道整治施工装备的加长臂挖掘机,设有的大臂和小臂,内设加强筋,能承载更大的负重,同时设有连接器,可以与不同工具头配合,可以实现快速灵活更新工具头和灵敏调整定位的目的。
附图说明
29.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
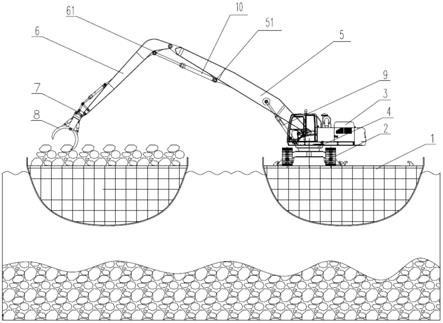
30.图1为本实用新型的整体结构示意图;
31.图2为工具头8的结构示意图;
32.图3为连接器7的结构示意图;
33.图4为可选的工具头8示意图;
34.其中,船体1、履带轮2、挖掘机主机3、回转平台4、大臂5、第一铰接片51、小臂6、第二铰接片61、连接器7、基座71、固定抓手72、活动抓手73、连接器油缸74、工具头8、安装板81、销柱82、液压夹83、液压夯84、铲斗85、抓斗86、透水架87、动臂油缸9、斗杆油缸10。
具体实施方式
35.为了使本领域的技术人员更好地理解本技术中的技术方案,下面将对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术的一部分实施
例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
36.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件上,它可以直接在另一个元件上或者间接设置在另一个元件上;当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至另一个元件上。
37.需要理解的是,术语“长度”、“宽度”、“上”、下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
38.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,多个”、“若干个”的含义是两个或两个以上,除非另有明确具体的限定。
39.须知,本说明书附图所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本技术可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本技术所能产生的功效及所能达成的目的下,均应仍落在本技术所揭示的技术内容得能涵盖的范围内。
40.本实用新型实施例采用递进的方式撰写。
41.如图1-至图4所示,一种适用于航道整治施工装备的加长臂挖掘机,包括船体1、履带轮2、回转平台4和挖掘机,所述回转平台4安装在所述履带轮2机架上,所述挖掘机包括挖掘机主机3、大臂5、小臂6、连接器7和工具头8;
42.所述挖掘机主机3安装在所述回转平台4上;
43.所述大臂5的第一端与所述挖掘机主机3铰接,所述挖掘机主机3与所述大臂5靠近第一端的机体之间安装有动臂油缸9;
44.所述小臂6呈“7”字型,包括短边结构和长边结构,所述短边结构的尾端与所述大臂5的第二端铰接,所述长边结构的尾端通过连接器7与所述工具头8连接;
45.所述小臂6的“7”字型短边结构和长边结构的转角处外表面设有第二铰接片61,所述大臂5中部外表面设有第一铰接片51,所述第一铰接片51和所述第二铰接片61之间通过斗杆油缸10连接;
46.所述大臂5和小臂6的主体结构均是箱体板件,箱体板件的内壁上设有沿臂长伸长方向的第一加强筋;
47.所述大臂5的中空内壁上还设有方环形的与所述第一加强筋垂直的第二加强筋。
48.优选地,所述第一铰接片51是锻件,通过焊接的方式固定在所述大臂5外表面,所述第二铰接片61是锻件,通过焊接的方式固定在所述小臂6外表面。
49.进一步地,所述工具头8上设有两块平均的安装板81,所述安装板81之间安装有两根平行的销柱82;
50.所述连接器7包括基座71、固定抓手72、活动抓手73和连接器油缸74,所述固定抓手72固定安装在所述基座71上,所述活动抓手73通过铰接销铰接安装在所述基座71上,所
述固定抓手72和活动抓手73上分别设有连接柱,所述连接器油缸74的两端分别与所述连接柱连接;
51.所述固定抓手72和活动抓手73的抓手部分别与所述工具头8上的销柱82配合。
52.当需要卸下工具头8时,连接器油缸74活塞向油缸底部回缩时,活动抓手73相对基座71转动,此时活动抓手73的抓手部向固定抓手72靠近,当活动抓手73与固定抓手72的抓手部之间的距离小于两根平行销柱82的距离时,连接器7可以与工具头8分离。
53.当需要将工具头8安装在小臂6上时,连接器油缸74活塞回到油缸底部,此时活动抓手73与固定抓手72的抓手部之间的距离小于两根平行销柱82的距离,将活动抓手73与固定抓手72的抓手部分别对应两根平行的销柱82,然后再将连接器油缸74活塞向远离连接器油缸74底部的方向移动,从而完成工具头8在小臂6上的安装。
54.进一步地,所述长臂上安装有大臂5倾角传感器(图中未标出),所述小臂6上安装有小臂6倾角传感器(图中未标出),所述工具头8上安装有工具头8倾角传感器(图中未标出),分别用于实时检测工作状态中大臂5、小臂6和工具头8的角度;
55.所述斗杆油缸10和动臂油缸9的进油管设有阀门调节器(图中未标出);
56.所述挖掘机主机3上设有长臂控制器(图中未标出),所述阀门调节器、大臂5的倾角传感器、小臂6的倾角传感器和工具头8的倾角传感器与所述长臂控制器电性连接。
57.长臂控制器结合设备的基础尺寸与各油缸工作范围,根据倾角传感器的检测数据可计算出工作装置的姿态及方位,然后通过阀门调节器的控制进行精准定位及作业。
58.进一步地,所述工具头8是液压夹83、液压夯84、铲斗85、抓斗86或透水架87中的一种,便于根据施工要求,迅速的完成工具头8的更换。
59.进一步地,所述斗杆油缸10位于所述大臂5和小臂6的下方。
60.进一步地,所述大臂5的总长为8.5-9m,所述小臂6的总长为5.5-6m,所述大臂5的总长是指大臂5上最远的两端之间的直线距离,所述小臂6的总长是指小臂6上最远的两端之间的直线距离。
61.进一步地所述大臂5的箱体板件的厚度是16mm-20mm。
62.所述大臂5最大的截面外周是边长为500mm-1000mm的长方形。
63.进一步地所述小臂6的箱体板件的厚度是14mm-20mm。
64.所述小臂6最大的截面外周是边长为400mm-800mm的长方形。
65.进一步地,所述加强筋的间距是1200mm-1600mm;
66.所述加强筋的宽度是460mm,高度是700mm-900mm。
67.上述尺寸规格的大臂5和小臂6更短合用于航道整治施工装备的加长臂挖掘机,能承载更大的负重。
68.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。