1.本发明属于电动夹爪技术领域,具体涉及一种用于四轴机器人的大行程电动夹爪及其实现方法。
背景技术:
2.在粉末压制成型行业中,压制成型的产品多采用人工将手伸入压机拿取的方式下料,该方式具有一定危险性,目前较多设备厂家已改用四轴机器人代替人工来夹取产品下料。
3.但粉末成型的产品有很多种规格,使用传统的气动夹爪会面临更换夹爪零件或夹爪气缸的问题,更换产品时需要耗费大量时间和费用去做调整。有部分更为先进的厂家已开发出伺服夹爪,通过伺服电机替代气缸的张开闭合作用。
4.但目前这种伺服夹爪成本较高,且夹爪间距范围较小,一般只能控制0-40mm范围的夹爪间距,面对粉末成型行业,实用性不强。
5.因此,亟需开发一种大行程,可适用绝大多数产品夹取的电动夹爪来增强四轴机器人的适用性。
技术实现要素:
6.本发明的目的在于提供一种用于四轴机器人的大行程电动夹爪,以解决上述背景技术中提出的问题。本发明提供的一种用于四轴机器人的大行程电动夹爪,具有夹取范围大以及通用性强的特点。
7.本发明另一目的在于提供一种用于四轴机器人的大行程电动夹爪的实现方法。
8.为实现上述目的,本发明提供如下技术方案:一种用于四轴机器人的大行程电动夹爪,包括底板,底板的端部设有直线滑轨,直线滑轨上分别设有第一齿条组和第二齿条组,第一齿条组的下方连接有第一夹爪,第二齿条组的下方连接有第二夹爪,,底板上设有用于驱动第一齿条组和第二齿条组的传动轴组,底板的下方设有用于驱动传动轴组的步进驱动组件,步进驱动组件与plc控制器信号连接。
9.为了传输传动轴组的动力,从而使夹爪可以在直线滑轨上实现滑动,进一步地,第一齿条组包括上随动块,其中,上随动块的下方设有夹爪固定块,上随动块的上方设有齿条固定块,齿条固定块上连接有齿条,第二齿条组的结构与第一齿条组的结构相同。
10.为了带动驱动轴动作,从而带动主动轴进行转动,进一步地,步进驱动组件包括步进电机和驱动轴,其中,步进电机的输出端与驱动轴的一端连接,驱动轴的另一端设有第一锥齿轮,步进电机与plc控制器信号连接。
11.为了用于plc控制器检测夹爪的原点位,进一步地,底板的下方设有原点光电,驱动轴上设有与原点光电相对应的遮光片,原点光电与plc控制器信号连接。
12.为了向后传输步进驱动组件的动力,且实现第一夹爪和第二夹爪同时向外侧或同时向内侧的移动,进一步地,传动轴组包括主动轴和从动轴,其中,主动轴与从动轴通过柱
齿轮啮合连接,主动轴还通过柱齿轮与第二齿条组连接,从动轴还通过柱齿轮与第一齿条组连接。
13.为了与驱动轴的第一锥齿轮进行啮合传输动力,进一步地,主动轴的下端设有第二锥齿轮。
14.为了与四轴机器人的末端进行连接,进一步地,底板的上方设有抱紧块。
15.为了保护运动部件,进一步地,底板上设有保护罩。
16.为了使第一夹爪和第二夹爪的滑动稳定性更好,进一步地,直线滑轨为上下双导轨结构,且上导轨和下导轨上均设有滑块。
17.在本发明中进一步地,所述的一种用于四轴机器人的大行程电动夹爪的实现方法,包括以下步骤:
18.(一)、抱紧块用于与四轴机器人的末端连接;
19.(二)、步进电机带动驱动轴转动,从而带动传动轴组动作;
20.(三)、主动轴通过第一柱齿轮与从动轴的第四柱齿轮啮合连接,实现主动轴的转动带动从动轴的转动,且主动轴与从动轴的转动方向相反;
21.(四)、主动轴通过第二柱齿轮与第二齿条组的齿条啮合连接,从动轴通过第三柱齿轮与第一齿条组的齿条啮合连接,实现传动轴组的动作带动第一夹爪与第二夹爪打开或闭合。
22.与现有技术相比,本发明的有益效果是:
23.1、本发明的传动轴组可以带动第一齿条组和第二齿条组同时相向或相背运动,从而实现了夹爪的开合,通过齿轮带动齿条在直线滑轨上滑动来实现夹爪开合方式,可以使夹取的范围更大,从而适用于更多规格产品的夹取;
24.2、本发明通过步进电机带动传动轴组进行动作,且步进电机的输出端设有步进减速器,可以对夹爪进行精准的控制;
25.3、本发明的直线滑轨为上下双导轨结构,且上导轨和下导轨上均设有滑块,使第一夹爪和第二夹爪的滑动稳定性更好,从而使夹取稳定性更好。
附图说明
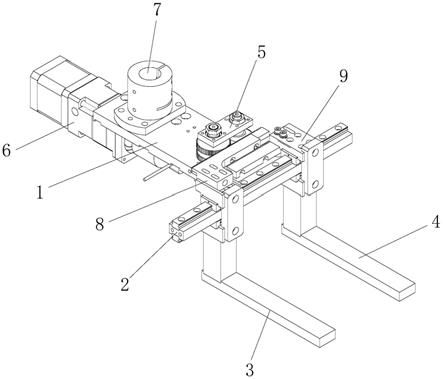
26.图1-2均为本发明拆下保护罩后的轴测结构示意图;
27.图3为本发明的结构示意图;
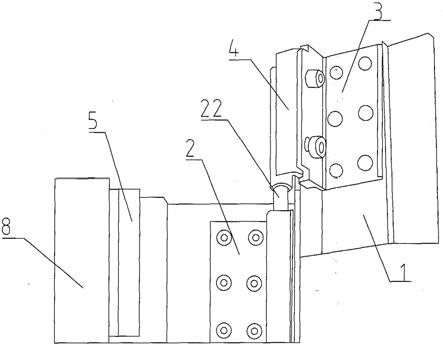
28.图4为本发明第一齿条组、第二齿条组与直线滑轨连接的结构示意图;
29.图5为本发明图1的正视结构示意图;
30.图6为本发明图5中a—a向的剖视结构示意图;
31.图7为本发明主动轴与从动轴连接的结构示意图;
32.图8为本发明图1的俯视结构示意图;
33.图中:1、底板;2、直线滑轨;3、第一夹爪;4、第二夹爪;5、传动轴组;51、主动轴;511、第一柱齿轮;512、第二柱齿轮;513、第二锥齿轮;52、从动轴;521、第三柱齿轮;522、第四柱齿轮;6、步进驱动组件;61、步进电机;62、步进减速器;63、驱动轴;64、第一锥齿轮;65、原点光电;66、遮光片;7、抱紧块;8、第一齿条组;81、夹爪固定块;82、下随动块;83、上随动块;84、齿条固定块;85、齿条;86、连接块;9、第二齿条组;10、保护罩。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.实施例1
36.请参阅图1-8,本发明提供以下技术方案:一种用于四轴机器人的大行程电动夹爪,包括底板1,底板1的端部设有直线滑轨2,直线滑轨2优选为上银的mgn9c-2r-215型直线滑轨,直线滑轨2上分别设有第一齿条组8和第二齿条组9,第一齿条组8的下方连接有第一夹爪3,第二齿条组9的下方连接有第二夹爪4,,底板1上设有用于驱动第一齿条组8和第二齿条组9的传动轴组5,底板1的下方设有用于驱动传动轴组5的步进驱动组件6,步进驱动组件6与plc控制器信号连接。
37.具体的,第一齿条组8包括上随动块83,其中,上随动块83安装在直线滑轨2的滑块上,上随动块83的下方通过连接块86连接有夹爪固定块81,上随动块83的上方设有齿条固定块84,齿条固定块84上连接有齿条85,第二齿条组9的结构与第一齿条组8的结构相同。
38.通过采用上述技术方案,通过齿条组传输传动轴组5的动力,从而使夹爪可以在直线滑轨2上实现滑动。
39.具体的,步进驱动组件6包括步进电机61和驱动轴63,其中,步进电机61和驱动轴63均通过安装座安装在底板1的底部,步进电机61的输出端设有步进减速器62,步进减速器62的输出端通过联轴器与驱动轴63的一端连接,驱动轴63的另一端设有第一锥齿轮64,步进电机61与plc控制器信号连接,步进电机61优选为杰美康的42j1848-425型步进电机。
40.通过采用上述技术方案,通过步进电机61带动驱动轴63动作,从而带动主动轴51进行转动。
41.具体的,传动轴组5包括主动轴51和从动轴52,其中,主动轴51和从动轴52分别通过轴承与底板1连接,主动轴51从上至下依次设有第一柱齿轮511和第二柱齿轮512,从动轴52从上至下依次设有第三柱齿轮521和第四柱齿轮522,第一柱齿轮511与第四柱齿轮522啮合连接,第二柱齿轮512与第二齿条组9的齿条啮合连接,第三柱齿轮521与第一齿条组8的齿条啮合连接,主动轴51的下端设有与第一锥齿轮64啮合连接的第二锥齿轮513。
42.通过采用上述技术方案,通过传动轴组5向后传输步进驱动组件6的动力,且实现第一夹爪3和第二夹爪4同时向外侧或同时向内侧的移动(即夹爪的开合动作)。
43.具体的,底板1的上方设有抱紧块7。
44.通过采用上述技术方案,用于与四轴机器人的末端进行连接。
45.具体的,底板1上设有保护罩10。
46.通过采用上述技术方案,用于保护运动部件。
47.实施例2
48.本实施例与实施例1不同之处在于:具体的,直线滑轨2为上下双导轨结构,且上导轨和下导轨上均设有滑块,第一齿条组8还包括下随动块82,下随动块82安装在直线滑轨2下导轨的滑块上,连接块86连接上随动块83和下随动块82,夹爪固定块81安装在下随动块82的下方,第二齿条组9的结构与第一齿条组8的结构相同。
49.通过采用上述技术方案,使第一夹爪3和第二夹爪4的滑动稳定性更好。
50.实施例3
51.本实施例与实施例1不同之处在于:具体的,底板1的下方设有原点光电65,驱动轴63上设有与原点光电65相对应的遮光片66,原点光电65与plc控制器信号连接,原点光电65优选为松下的pm-y45型光电。
52.通过采用上述技术方案,用于plc控制器检测夹爪的原点位。
53.进一步地,本发明所述的一种用于四轴机器人的大行程电动夹爪的实现方法,包括以下步骤:
54.(一)、抱紧块7用于与四轴机器人的末端连接;
55.(二)、步进电机61带动驱动轴63转动,从而带动传动轴组5动作;
56.(三)、主动轴51通过第一柱齿轮511与从动轴52的第四柱齿轮522啮合连接,实现主动轴51的转动带动从动轴52的转动,且主动轴51与从动轴52的转动方向相反;
57.(四)、主动轴51通过第二柱齿轮512与第二齿条组9的齿条啮合连接,从动轴52通过第三柱齿轮521与第一齿条组8的齿条啮合连接,实现传动轴组5的动作带动第一夹爪3与第二夹爪4打开或闭合。
58.本发明的动作过程如下:
59.(1)、夹爪打开:步进电机61带动驱动轴63顺时针转动,从而带动主动轴51逆时针转动,主动轴51带动从动轴52顺时针转动,从而带动第一夹爪3和第二夹爪4同时向外侧移动,实现夹爪的打开;
60.(2)、夹爪闭合:步进电机61带动驱动轴63逆时针转动,从而带动主动轴51顺时针转动,主动轴51带动从动轴52逆时针转动,从而带动第一夹爪3和第二夹爪4同时向内侧移动,实现夹爪的闭合。
61.综上所述,本发明的传动轴组5可以带动第一齿条组8和第二齿条组9同时相向或相背运动,从而实现了夹爪的开合,通过齿轮带动齿条在直线滑轨上滑动来实现夹爪开合方式,可以使夹取的范围更大,从而适用于更多规格产品的夹取;本发明通过步进电机61带动传动轴组5进行动作,且步进电机61的输出端设有步进减速器62,可以对夹爪进行精准的控制;本发明的直线滑轨2为上下双导轨结构,且上导轨和下导轨上均设有滑块,使第一夹爪3和第二夹爪4的滑动稳定性更好,从而使夹取稳定性更好。
62.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。