技术特征:
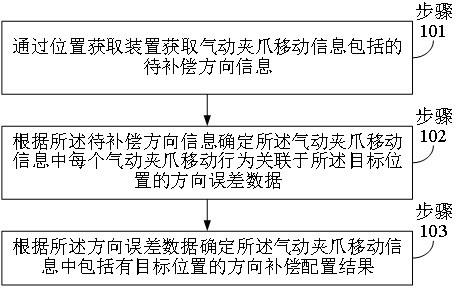
1.一种基于气动夹爪控制的方向补偿方法,其特征在于,所述方法包括:通过位置获取装置获取气动夹爪移动信息包括的待补偿方向信息;根据所述待补偿方向信息确定所述气动夹爪移动信息中每个气动夹爪移动行为关联于所述目标位置的方向误差数据;根据所述方向误差数据确定所述气动夹爪移动信息中包括有目标位置的方向补偿配置结果。2.根据权利要求1所述的方法,其特征在于,所述气动夹爪移动信息包括未补偿的气动夹爪移动信息。3.根据权利要求2所述的方法,其特征在于,所述通过位置获取装置获取气动夹爪移动信息包括的待补偿方向信息,包括:通过位置获取装置获取所述未补偿的气动夹爪移动信息的气动夹爪位置信息;以及所述根据所述待补偿方向信息确定所述气动夹爪移动信息中每个气动夹爪移动行为关联于所述目标位置的方向误差数据,包括:根据所述未补偿的气动夹爪移动信息的气动夹爪位置信息,确定所述气动夹爪移动信息中每个气动夹爪移动行为关联于所述目标位置的方向误差数据。4.根据权利要求1所述的方法,其特征在于,所述根据所述方向误差数据确定所述气动夹爪移动信息中包括有目标位置的方向补偿配置结果,包括:根据关联于所述目标位置的方向误差数据不小于设定方向误差数据的多个气动夹爪移动行为的移动位置结果确定所述方向补偿配置结果。5.根据权利要求1-4任一所述的方法,其特征在于,所述根据所述方向误差数据确定所述气动夹爪移动信息中包括有目标位置的方向补偿配置结果,还包括:通过方向分析模块确定所述气动夹爪移动信息中包括所述目标位置的方向补偿配置结果中所述目标位置的坐标轴区分标记;对所述目标位置的坐标轴区分标记进行坐标轴分类配置,得到所述目标位置的移动位置结果和/或方向补偿信息。6.一种基于气动夹爪控制的方向补偿系统,其特征在于,包括存储器、处理器;其中,所述存储器、所述处理器之间直接或间接地电性连接;所述处理器通过从所述存储器中读取计算机程序并运行以实现权利要求1-5任一项所述的方法。
技术总结
本申请提供了一种基于气动夹爪控制的方向补偿方法及系统,在实际实施时,通过位置获取装置对气动夹爪移动信息进行目标位置获取,获取待补偿方向信息并得到气动夹爪移动信息中每个气动夹爪移动行为所匹配的目标位置的方向误差数据从而确定出气动夹爪移动信息中包括有目标位置的方向补偿配置结果,如此,能够准确地获取出气动夹爪移动信息中的方向补偿配置结果,进而提高气动夹爪移动方向的准确性。性。性。
技术研发人员:韩凤磷 刘福东
受保护的技术使用者:斯瑞而(苏州)智能技术有限公司
技术研发日:2022.03.04
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。