1.本发明涉及超高速成像技术领域,特别是涉及一种同轴超高速多序列激光阴影成像装置。
背景技术:
2.随着我国航天技术、武器装备和基础学科的发展,涉及超高速空气动力学、超高速碰撞、爆炸与冲击、燃烧与化学反应等领域的研究不断深入。在这些研究工作中,许多现象是持续时间仅为微秒甚至纳秒级的超高速瞬态变化过程,需要有一种照相系统能够对这一过程进行清晰、连续地成像记录,以便掌握物理现象的本质。目前实验室开展的多种超高速现象研究中,在某一固定测试区域的持续时间通常为几微秒到几十微秒,如超高速目标的速度为10km/s(目前超高速现象通常低于此值),测试区域大小为100mm,则超高速目标在测试区域的持续时间为10μs,在测试区域内通常如果能够获得4幅~8幅超高速目标图像,则足以表征超高速现象的变化过程,也就是其帧频至少达到40万幅/秒~80万幅/秒。如果超高速目标速度低于10km/s,则超高速现象在测试区域的持续时间更长,相同帧频下可以获得更多数量的图像。为了在记录图像时不因为目标的运动引起较大的模糊,则每幅图像的曝光时间必须足够短,通常要求记录的图像运动模糊量小于图像分辨率的1/10,则认为记录的图像满足清晰成像要求。
3.目前国外可购置的超高速摄影机都采用微通道板(mcp)技术,图像像素都在130万左右,并采用两种成像方式,一种只有一个成像通道,其帧频与图像像素成反比,全画幅时帧频约2万幅/秒,在最高帧频为100万幅/秒时像素为2万左右;另一种采用分幅成像方式,拍摄4幅图像时需要4个通道。国内中科院西安光机所、深圳大学能生产序列数量大于8个、曝光成像时间大于200纳秒的转镜式分幅胶片摄影机,由于采用机械旋转的方式,每幅图像的曝光时间难以小于100ns,而且随着胶片生产量减少,此类摄影机将很少使用。中国空气动力研究与发展中心研制了基于“多光源空间分离技术”的多种规格超高速摄影机,其图像像素大于1000万可以实现较高的成像分辨率,并能很好地消除测试区域自发光,但不同序列时刻的光轴不一致,这样会导致每幅图像的成像角度和测试区域不一致,而且不同序列成像时因光路结构不一样,不同序列图像的背景光斑质量也会有所差别。
技术实现要素:
4.本发明的目的是提供一种同轴超高速多序列激光阴影成像装置,能够实现不同序列成像的光轴和光路结构一致,且对同一测试区域进行成像,成像光斑的背景质量可保持一致。
5.为实现上述目的,本发明提供了如下方案:
6.一种同轴超高速多序列激光阴影成像装置,包括:
7.多腔光源系统,用于发出序列激光光束;
8.光纤耦合系统,与所述多腔光源系统连接,用于对所述序列激光光束进行耦合和
传输;
9.平行光透射成像系统,与所述光线耦合系统连接,用于对耦合后的光束进行准直和汇聚;
10.成像系统,与所述平行光透射成像系统连接,用于对汇聚后的光束进行等光程分光,得到多个分光图像;
11.数据采集系统,与所述成像系统连接,用于按照一定时序接收不同位置的分光图像,并将接收到的分光图像远程传输到计算机进行图像处理;
12.控制系统,分别与所述多腔光源系统和所述数据采集系统连接,用于对所述多腔光源系统中不同序列激光光束的闪光时间及数据采集系统中曝光相机开启和关闭时间进行控制。
13.可选地,所述多腔光源系统包括:多个腔体、与多个腔体对应设置的反射镜和分束镜以及控制单元;不同腔体发出的序列激光光束经过对应设置的反射镜和分束镜后在同一位置输出;所述控制单元与多个所述腔体连接,用于根据所述控制系统的控制信号对不同序列激光光束的闪光时间进行控制。
14.可选地,所述腔体为激光头。
15.可选地,所述多腔光源系统包括:第一激光头、第二激光头、第三激光头、第四激光头、第一分束镜、第二分束镜、第三分束镜、第一反射镜、第二反射镜以及控制单元;所述第一激光头通过所述第一分束镜和所述第二分束镜后进入光纤耦合系统,第二激光头通过第一反射镜、第一分束镜和第二分束镜后进入光纤耦合系统,第三激光头通过第三分束镜和第二分束镜后进入光纤耦合系统,第四激光头通过第二反射镜、第三分束镜和第二分束镜后进入光纤耦合系统;所述控制单元用于根据所述控制系统的控制信号对第一激光头、第二激光头、第三激光头、第四激光头进行控制。
16.可选地,所述光纤耦合系统包括:耦合器和光纤;所述耦合器与所述多腔光源系统连接,用于对所述序列激光光束进行耦合,所述光纤与所述耦合器连接,用于对耦合后的光束进行传输。
17.可选地,所述平行光透射成像系统包括:准直镜和成像镜;耦合后的光束通过所述准直镜后形成平行光束,所述平行光束穿过测试区域后进入所述成像镜开始汇聚。
18.可选地,所述成像系统包括多个成像透镜、多个分束镜、多个反射镜以及多个曝光相机。
19.可选地,所述成像系统包括:第一成像透镜、第二成像透镜、第四分束镜、第五分束镜、第六分束镜、第三反射镜、第四反射镜、第五反射镜、第一曝光相机、第二曝光相机、第三曝光相机以及第四曝光相机;所述第一成像透镜把所述成像镜的汇聚光束进行准直后通过所述第二成像透镜进行汇聚,汇聚光束通过第四分束镜、第五分束镜和第三反射镜后进入第一曝光相机,汇聚光束通过第四分束镜和第五分束镜后进入第二曝光相机,汇聚光束通过第四分束镜、第六分束镜和第四反射镜后进入第三曝光相机,汇聚光束通过第四分束镜、第六分束镜和第五反射镜后进入第四曝光相机。
20.根据本发明提供的具体实施例,本发明公开了以下技术效果:
21.本发明通过采用多腔光源共用一个光路出口,不同序列的激光束共用一套成像光路进入平行光透射装置和成像分光装置,通过相机的感光时间和激光闪光时间同步,能够
实现不同序列成像的光轴和光路结构一致,且对同一测试区域进行成像,成像光斑的背景质量可保持一致,实现对超高速现象的多序列成像。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
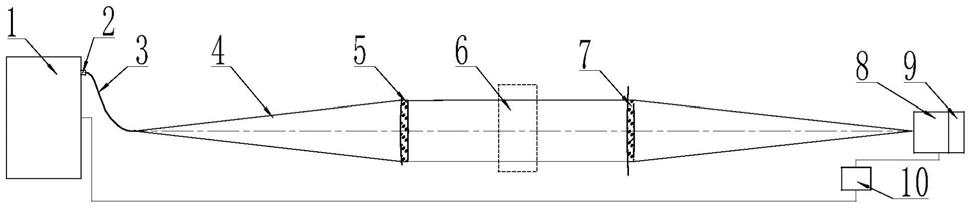
23.图1为本发明实施例同轴超高速多序列激光阴影成像装置的结构示意图;
24.图2为本发明实施例多腔光源系统的示意图;
25.图3为本发明实施例成像系统的示意图;
26.图4为本发明实施例控制系统的信号示意图。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.本发明的目的是提供一种同轴超高速多序列激光阴影成像装置,能够实现不同序列成像的光轴和光路结构一致,且对同一测试区域进行成像,成像光斑的背景质量可保持一致。
29.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
30.如图1所示,本发明提供的一种同轴超高速多序列激光阴影成像装置,包括:
31.多腔光源系统1,用于发出序列激光光束。
32.光纤耦合系统,与所述多腔光源系统连接,用于对所述序列激光光束进行耦合和传输。所述光纤耦合系统包括:耦合器2和光纤3;所述耦合器2与所述多腔光源系统1连接,用于对所述序列激光光束进行耦合,所述光纤3与所述耦合器2连接,用于对耦合后的光束进行传输。由于激光闪光时峰值功率较高,因此光纤耦合系统中的耦合器2及光纤3都需要满足高能量阈值激光光斑要求。
33.平行光透射成像系统,与所述光线耦合系统连接,用于对耦合后的光束进行准直和汇聚。所述平行光透射成像系统包括:准直镜5和成像镜7;耦合后的光束通过所述准直镜5后形成平行光束,所述平行光束穿过测试区域6后进入所述成像镜7开始汇聚。准直镜5和成像镜7的相对口径通常在1/10左右
34.成像系统8,与所述平行光透射成像系统连接,用于对汇聚后的光束进行等光程分光,得到多个分光图像。
35.数据采集系统9,与所述成像系统8连接,用于按照一定时序接收不同位置的分光图像,并将接收到的分光图像远程传输到计算机进行图像处理。
36.控制系统10,分别与所述多腔光源系统1和所述数据采集系统9连接,用于对所述
多腔光源系统中不同序列激光光束的闪光时间及数据采集系统中曝光相机开启和关闭时间进行控制。
37.本发明的目的这样实现的:多腔光源系统1中通过系列反射镜和分束镜实现不同腔体发出的光束在同一位置输出脉冲激光束,不同时刻发出的激光束由光纤耦合系统的耦合器2进入同一根光纤3耦合输出,输出的发散光束4通过平行光透射成像系统后产生平行光束,平行光束通过测试区域6后再汇聚进入成像系统8,成像系统对光束进行等光程分光,数据采集系统9中不同短时间曝光相机按照一定时序接收不同位置的分光图像,当多腔光源系统1第一次闪光前第一序列短时间曝光相机打开并开始感光,当第一次闪光完成后第一序列短时间曝光相机关闭,多腔光源系统1第二次闪光前第二序列短时间曝光相机打开并开始感光,按照此顺序第三、第四及其它序列短时间曝光相机打开并完成感光,每个相机的感光时间由对应序列的激光光源闪光时间确定,数据采集系统9把图像远程传输到计算机和进行图像的后期处理,控制系统10对多腔光源系统1不同序列激光束的闪光时间及相机开启和关闭时间进行控制。
38.其中,所述多腔光源系统1包括:多个腔体、与多个腔体对应设置的反射镜和分束镜以及控制单元;不同腔体发出的序列激光光束经过对应设置的反射镜和分束镜后在同一位置输出;所述控制单元与多个所述腔体连接,用于根据所述控制系统的控制信号对不同序列激光光束的闪光时间进行控制。
39.如果需要在一次测试中获得4幅图像,则需要4个腔体,所述腔体为激光头。如图2所示,所述多腔光源系统1包括:第一激光头101、第二激光头102、第三激光头103、第四激光头104、第一分束镜106、第二分束镜107、第三分束镜109、第一反射镜108、第二反射镜110以及控制单元105。所述第一激光头101通过所述第一分束镜106和所述第二分束镜107后进入光纤耦合系统,第二激光头102通过第一反射镜108、第一分束镜106和第二分束镜107后进入光纤耦合系统,第三激光头103通过第三分束镜109和第二分束镜107后进入光纤耦合系统,第四激光头104通过第二反射镜110、第三分束镜109和第二分束镜107后进入光纤耦合系统;所述控制单元105用于根据所述控制系统10的控制信号对第一激光头101、第二激光头102、第三激光头103、第四激光头104进行控制。
40.其中,成像系统8中包括系列分束镜、反射镜和透镜,分束镜和反射镜对汇聚光束进行等光程分光,如果需要在一次测试中获得4幅图像,则需要形成4个等光程光路,如果需要在一次测试中获得8幅图像,则需要形成8个等光程光路。如图3所示,所述成像系统8包括:第一成像透镜801、第二成像透镜802、第四分束镜807、第五分束镜805、第六分束镜808、第三反射镜803、第四反射镜811、第五反射镜809、第一曝光相机804、第二曝光相机806、第三曝光相机810以及第四曝光相机812。所述第一成像透镜801把所述成像镜7的汇聚光束进行准直后通过所述第二成像透镜802进行汇聚,汇聚光束通过第四分束镜807、第五分束镜805和第三反射镜803后进入第一曝光相机804,汇聚光束通过第四分束镜807和第五分束镜805后进入第二曝光相机806,汇聚光束通过第四分束镜807、第六分束镜808和第四反射镜811后进入第三曝光相机810,汇聚光束通过第四分束镜807、第六分束镜808和第五反射镜809后进入第四曝光相机812。
41.其中,控制系统10按照一定时序发出ttl信号,控制多腔光源系统1按照设置的时序进行序列闪光,同时控制多个短时间曝光相机按照一定时序开启和关闭。控制系统10按
照不同时序发出四个ttl信号给成像系统8,成像系统8的第一曝光相机804、第二曝光相机806、第三曝光相机810以及第四曝光相机812按照时序进行打开,在四个相机打开瞬间,控制系统10按照不同时序发出四个ttl信号给多腔光源系统1,多腔光源系统1中的第一激光头101、第二激光头102、第三激光头103和第四激光头104按照给定的时序进行闪光,在闪光瞬间不同相机分别记录测试区域6的变化信息。第一激光头101、第二激光头102、第三激光头103和第四激光头104闪光实现小于10ns,第一曝光相机804、第二曝光相机806、第三曝光相机810以及第四曝光相机812的曝光时间小于1μs,因此可以实现帧频大于100万幅/秒、曝光时间小于10ns的序列成像。
42.如图4所示,横轴为信号提供的时间,纵轴为ttl信号,当第一个ttl信号905提供给第一曝光相机804后,第一曝光相机804开始曝光1μs左右,当第一个ttl信号905提供给第一曝光相机804经过10ns~200ns的延时后提供给多腔光学系统第一个ttl信号901,第一激光头101闪光;当第二个ttl信号906提供给第二曝光相机806后,第二曝光相机806开始曝光1μs左右,当第二个ttl信号906提供给第二曝光相机806经过10ns~200ns的延时后提供给多腔光学系统第二个ttl信号902,第二激光头102闪光;当第三个ttl信号907提供给第三曝光相机810后,第三曝光相机810开始曝光1μs左右,当第三个ttl信号907提供给第三曝光相机810经过10ns~200ns的延时后提供给多腔光学系统第三个ttl信号903,第三激光头103闪光;当第四个ttl信号908提供给第四曝光相机812后,第四曝光相机812开始曝光1μs左右,当第四个ttl信号908提供给第四曝光相机812经过10ns~200ns的延时后提供给多腔光学系统第四个ttl信号904,第四激光头104闪光。
43.本发明是在多光源空间技术基础上的发展和补充,多光源空间技术存在不同序列成像的光轴不一致,导致每幅图像的成像区域和角度存在差别,而且每幅图像的成像光斑可能会存在较大差别。本发明通过采用多腔光源共用一个光路出口,不同序列的激光束共用一套成像光路进入平行光透射装置和成像分光装置,通过相机的感光时间和激光闪光时间同步,实现对超高速现象的多序列成像。
44.本发明具有以下特点:
45.1、多腔光源实现不同序列闪光的光束出口位置相同;
46.2、不同序列的闪光光束共用1套光纤耦合系统;
47.3、多个序列光束通过同一光路穿过测试区域,即不同时刻的成像光路能保持严格一致;
48.4、获得的不同序列图像的背景质量基本一致;
49.5、对测试区域序列成像的曝光时间由不同序列的光束闪光时间确定,最高帧频由相机的最短曝光时间确定,因激光光束的闪光时间较短,记录图像时能够对超高速目标进行瞬间冻结,能够满足对速度较高的超高速现象进行序列清晰成像。
50.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
51.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。