1.本发明属于无人机领域,涉及地图处理方法,具体是一种基于地形梯度二值化的直升机航迹规划地图处理方法。
背景技术:
2.随着现代科技的发展,纸质地图所能展现的信息已经不满足于人们的需求,数字地图便孕育而生,数字地图采用数字存储的技术,而且可以显示在电子屏幕上,可以通过计算机技术对数字地图进行提取、显示、修改、分析等等。数字地图所表现的信息已经远远大于纸质的地图。另外可以通过人们对地图信息的不同需求,可以有选择性的加载、拼接、组合,形成给予不同应用下的数字地图。在数字地图上可以描绘出地形地貌特征,可以按需求等比例的放大或是缩小地图,而且可以很方便的与卫星上的影像照片、航空照片结合使用。利用数字地图,可以对真实地形中的高山、湖泊、平原、高原等地表特征进行三维的模拟。显然这是纸质形式的地图无法达到的效果。对于执行任务的直升机来说,其飞行的距离如果比较长,直接将高程数据应用于航迹规划时,它较大的数据量会影响航迹规划算法的效果及运算效率。
技术实现要素:
3.针对现有技术存在的不足,本发明的目的在于,提供一种基于地形梯度二值化的直升机航迹规划地图处理方法,解决现有技术中数字高程地图数据量大且信息冗余导致的航迹规划效率低的技术问题。
4.为了解决上述技术问题,本发明采用如下技术方案予以实现:
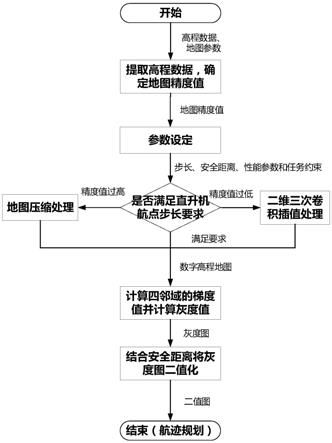
5.一种基于地形梯度二值化的直升机航迹规划地图处理方法,该方法具体包括以下步骤:
6.步骤一,提取数字高程地图中的高程数据和地图参数,根据地图参数确定地图精度值k;
7.k=l
·
cos(27.5)
8.所述的地图参数包括经度、纬度和地图栅格数量;
9.其中:
10.l表示单个栅格的纬度方向的实际距离为
11.x表示单位经度或者单位纬度的栅格数;
12.m表示地图包含的经度或者纬度的数量;
13.步骤二,设定直升机输入航点的步长、直升机飞行的安全距离、直升机性能参数和任务约束下的飞机参数;
14.所述的直升机性能参数包括直升机巡航状态下的前飞速度最大值为v
fmax
、任务要求下的前飞速度约束最小值v
fmin
、爬升速度最大值v
cmax
和任务要求下的爬升速度约束最小
值v
cmin
;
15.步骤三,判断地图精度值与直升机输入航点的步长比值大小,对应进行二维三次卷积插值处理或压缩处理,得到高精度的数字高程地图;
16.步骤四,计算步骤三中的得到的数字高程地图中每个栅格对应位置的四邻域的梯度值,并选取最大地形梯度值;
17.步骤五,根据最大梯度值和直升机性能参数得到灰度值;
18.步骤六,对步骤五得到的灰度值结合直升机飞行的安全距离进行二值化处理得到二值图。
19.本发明还包括以下技术特征:
20.所述的判断地图精度值与直升机输入航点的步长比值大小,进行二维三次卷积插值处理或压缩处理得到高精度的数字高程地图具体包括以下内容:
21.若地图精度值与直升机输入航点步长的比值大于1.2倍,则对高程数据进行压缩处理,得到新的高程数据m1,进而得到高精度的数字高程地图n1;若地图精度值与直升机输入航点步长的比值小于0.8倍,则对高程数据进行二维三次卷积插值处理,得到新的高程数据m2,进而得到高精度的数字高程地图n2,若地图精度值与直升机输入航点步长的比值在0.8~1.2内,进入步骤四。
22.步骤四中,所述的计算步骤三中的得到的数字高程地图中每个栅格对应位置的四邻域的梯度值,并选取最大地形梯度值具体包括以下步骤:
23.步骤4.1,采用下面公式计算栅格纬度方向的地形梯度值θa、θb;
[0024][0025][0026]
其中:
[0027]
h表示当前栅格的高程数据;
[0028]
h1、h2分别表示四邻域中纬度方向两个栅格的高程数据;
[0029]
m表示纬度方向相邻栅格中心之间的实际距离;
[0030]
步骤4.2,同理可得栅格经度方向的地形梯度值为
[0031][0032][0033]
其中:
[0034]
h3、h4表示四邻域中经度方向两个栅格的高程数据;
[0035]
n表示经度方向相邻栅格中心之间的实际距离;
[0036]
步骤4.4,根据地形梯度值θa、θb、θc、θd确定栅格的最大地形梯度值θ。
[0037]
θ=max{θ
a,
,θb,θc,θd}
[0038]
所述的根据最大地形梯度值和直升机性能参数得到灰度值具体包括以下步骤:
[0039]
步骤5.1,确定直升机飞行的最小俯仰角为θ
min
和最大俯仰角为θ
max
;
[0040][0041][0042]
步骤5.2,采用下述公式计算灰度值c的计算过程如下:
[0043][0044]
其中:
[0045]
θ指的是每个栅格的最大地形梯度值
[0046]cmin
表示最小地形梯度值的栅格对应的灰度值;
[0047]cmax
表示最大地形梯度值的栅格对应的灰度值;
[0048]cnot
表示绝对不可达的栅格对应的灰度值;
[0049]
{c
min
~c
max
,c
not
}为灰度值范围。
[0050]
所述的对步骤五得到的灰度值结合直升机飞行的安全距离进行二值化处理得到二值图的过程具体包括以下步骤;
[0051]
步骤6.1,确定栅格最大俯仰角α下的灰度值c
α
;
[0052][0053]
步骤6.2,判断当前栅格对应的灰度值与灰度值c
α
的大小,若灰度值大于灰度值c
α
,则将当前栅格设定为不可飞域,二值c'赋值为0,灰度值小于灰度值c
α
,设将当前栅格设定为可飞域,二值c'赋值为1,生成二值图;
[0054][0055]
步骤6.3,根据直升机飞行的安全距离ls,对二值图的不可飞域进行膨胀处理,不可飞域向八邻域膨胀个栅格得到最终的二值图。
[0056]
本发明与现有技术相比,有益的技术效果是:
[0057]
通过对比步长要求与地图精度值,使用插值算法及地图压缩等算法处理得到能够直接满足任务要求的数字高程地图,避免地图精度值过高或过低对航迹规划效果的影响;通过计算梯度值生成灰度图的方法,降低了内存占用,为后续航迹规划的代价计算提高效率;通过结合直升机性能参数和任务要求下的参数将灰度图二值化,在直升机起飞前已经得到能够安全飞行的可飞域,极大的为后续航迹规划提高算法效率;解决了现有技术中数字高程地图数据量大且信息冗余导致的航迹规划效率低的技术问题。
附图说明
[0058]
图1为本发明的方法流程图;
[0059]
图2(a)为栅格示意图;
[0060]
图2(b)为栅格四领域示意图;
[0061]
图3为直接读取高程数据;
[0062]
图4为以角度表示的灰度图;
[0063]
图5为二值处理得到的二值图;
[0064]
图6为实测例1原始高程数据;
[0065]
图7(a)为进行压缩处理后生成的灰度图;
[0066]
图7(b)为未进行压缩处理生成的灰度图;
[0067]
图8(a)为进行压缩处理后生成的二值图;
[0068]
图8(b)未进行压缩处理生成的二值图;
[0069]
图9为实测例2原始高程数据;
[0070]
图10(a)为进行压缩处理后生成的灰度图;
[0071]
图10(b)为未进行压缩处理生成的灰度图;
[0072]
图11(a)为进行压缩处理后生成的二值图;
[0073]
图11(b)为未进行压缩处理生成的二值图。
[0074]
以下结合实施例对本发明的具体内容作进一步详细解释说明。
具体实施方式
[0075]
以下给出本发明的具体实施例,需要说明的是本发明并不局限于以下具体实施例,凡在本技术技术方案基础上做的等同变换均落入本发明的保护范围。
[0076]
一种基于地形梯度二值化的直升机航迹规划地图处理方法,如图1所示,该方法具体包括以下步骤:
[0077]
步骤一,提取数字高程地图中的高程数据和地图参数,根据地图参数确定地图精度值k;
[0078]
k=l
·
cos(27.5)
[0079]
所述的地图参数包括经度、纬度和地图栅格数量;
[0080]
其中:
[0081]
l表示单个栅格的纬度方向的实际距离为
[0082]
x表示单位经度或者单位纬度的栅格数;
[0083]
m表示地图包含的经度或者纬度的数量;
[0084]
步骤二,设定直升机输入航点的步长、直升机飞行的安全距离、直升机性能参数和任务约束下的飞机参数;
[0085]
所述的直升机性能参数包括直升机巡航状态下的前飞速度最大值为v
fmax
、任务要求下的前飞速度约束最小值v
fmin
、爬升速度最大值v
cmax
和任务要求下的爬升速度约束最小值v
cmin
;
[0086]
步骤三,判断地图精度值与直升机输入航点的步长比值大小,对应进行二维三次卷积插值处理或压缩处理,得到高精度的数字高程地图;
[0087]
步骤四,计算步骤三中的得到的数字高程地图中每个栅格对应位置的四邻域的梯
度值,并选取最大地形梯度值;
[0088]
步骤五,根据最大梯度值和直升机性能参数得到灰度值;
[0089]
步骤六,对步骤五得到的灰度值结合直升机飞行的安全距离进行二值化处理得到二值图。
[0090]
在上述技术方案中,提取的高程数据如图3所示,对应生成的灰度值和二值图分别如图4和图5所示;
[0091]
通过对比步长要求与地图精度值,使用插值算法及地图压缩等算法处理得到能够直接满足任务要求的数字高程地图,避免地图精度值过高或过低对航迹规划效果的影响;通过计算梯度值生成灰度图的方法,降低了内存占用,为后续航迹规划的代价计算提高效率;通过结合直升机性能参数和任务要求下的参数将灰度图二值化,在直升机起飞前已经得到能够安全飞行的可飞域,极大的为后续航迹规划提高算法效率;解决了现有技术中数字高程地图数据量大且信息冗余导致的航迹规划效率低的技术问题。
[0092]
具体的,所述的判断地图精度值与直升机输入航点的步长比值大小,进行二维三次卷积插值处理或压缩处理得到高精度的数字高程地图具体包括以下内容:
[0093]
若地图精度值与直升机输入航点步长的比值大于1.2倍,则对高程数据进行压缩处理,得到新的高程数据m1,进而得到高精度的数字高程地图n1;若地图精度值与直升机输入航点步长的比值小于0.8倍,则对高程数据进行二维三次卷积插值处理,得到新的高程数据m2,进而得到高精度的数字高程地图n2,若地图精度值与直升机输入航点步长的比值在0.8~1.2内,进入步骤四。
[0094]
具体的,步骤四中,所述的计算步骤三中的得到的数字高程地图中每个栅格对应位置的四邻域的梯度值,并选取最大地形梯度值具体包括以下步骤:
[0095]
步骤4.1,采用下面公式计算栅格纬度方向的地形梯度值θa、θb;
[0096][0097][0098]
其中:
[0099]
h表示当前栅格的高程数据;
[0100]
h1、h2分别表示四邻域中纬度方向两个栅格的高程数据;
[0101]
m表示纬度方向相邻栅格中心之间的实际距离;
[0102]
步骤4.2,同理可得栅格经度方向的地形梯度值为
[0103][0104][0105]
其中:
[0106]
h3、h4表示四邻域中经度方向两个栅格的高程数据;
[0107]
n表示经度方向相邻栅格中心之间的实际距离;
[0108]
步骤4.4,根据地形梯度值θa、θb、θc、θd确定栅格的最大地形梯度值θ。
[0109]
θ=max{θ
a,
,θb,θc,θd}
[0110]
具体的,所述的根据最大地形梯度值和直升机性能参数得到灰度值具体包括以下步骤:
[0111]
步骤5.1,确定直升机飞行的最小俯仰角为θ
min
和最大俯仰角为θ
max
;
[0112][0113][0114]
步骤5.2,采用下述公式计算灰度值c的计算过程如下:
[0115][0116]
其中:
[0117]
θ指的是每个栅格的最大地形梯度值
[0118]cmin
表示最小地形梯度值的栅格对应的灰度值;
[0119]cmax
表示最大地形梯度值的栅格对应的灰度值;
[0120]cnot
表示绝对不可达的栅格对应的灰度值;
[0121]
{c
min
~c
max
,c
not
}为灰度值范围。
[0122]
具体的,所述的对步骤五得到的灰度值结合直升机飞行的安全距离进行二值化处理得到二值图的过程具体包括以下步骤;
[0123]
步骤6.1,确定栅格最大俯仰角α下的灰度值c
α
;
[0124][0125]
步骤6.2,判断当前栅格对应的灰度值与灰度值c
α
的大小,若灰度值大于灰度值c
α
,则将当前栅格设定为不可飞域,二值c'赋值为0,灰度值小于灰度值c
α
,设将当前栅格设定为可飞域,二值c'赋值为1,生成二值图;
[0126][0127]
步骤6.3,根据直升机飞行的安全距离ls,对二值图的不可飞域进行膨胀处理,不可飞域向八邻域膨胀个栅格得到最终的二值图。
[0128]
实测例1:
[0129]
采用上述技术方案,在西藏地区进行航迹规划测试,采集西藏地区的原始地形图,如图6所示。从原始地形图提取的地图参数和仿真数据如表1所示,针对不同直升机航点要求的步长与通过地图参数计算得到的地图精度值进行对比后,判断是否需要对数字高程地图进行处理。再对高程数据进行梯度值计算生成最大地形梯度值的灰度图,图7(a)为进行压缩处理后生成的灰度图,图7(b)为未进行压缩处理生成的灰度图。对得到的灰度值结合
直升机飞行的安全距离进行二值化处理得到二值图,图8(a)为进行压缩处理后生成的二值图,图8(b)为未进行压缩处理生成的二值图。最终进行仿真验证,分别对未进行压缩处理及压缩处理后的地图采用同一起终点及同一算法(使用灰度值作为代价的a*算法)进行航迹规划,从表1中的得到的航迹规划结果可以看出,规划时间从48.9s缩短到6.7s,遍历栅格数也从127285降低到了24939,明显减少了算法遍历次数,航迹规划效率有明显提升。而在使用二值图进行航迹规划后,同样的起终点航迹规划时间只有0.462249s,遍历栅格数也从降低到了2144,极大的减少了算法遍历次数,航迹规划效率有大大提升。
[0130]
表1西藏地区地图信息及仿真数据
[0131]
地图区域西藏地区地图地图起始纬度27.7771地图起始经度91.6967地图终止纬度28.1670地图终止经度92.1496一经度或者一纬度的栅格数3600航迹规划起点纬度27.8191航迹规划起点经度91.7534航迹规划终点纬度28.023航迹规划终点经度91.8314航迹规划路径长度30786.973630m未进行压缩处理航迹规划时间48.922500s未进行压缩处理航迹规划遍历栅格数127285进行压缩处理后航迹规划时间6.718219s进行压缩处理后航迹规划遍历栅格数24939使用二值图航迹规划时间0.462249s使用二值图航迹规划遍历栅格数2144
[0132]
实测例2:
[0133]
采用上述技术方案,在陕西地区丘陵地形地区进行航迹规划测试,采集陕西地区丘陵地形地区的原始地形图,如图9所示,从原始地形图提取的地图参数和仿真数据如表2所示,针对不同直升机航点要求的步长与通过地图参数计算得到的地图精度值进行对比后,判断是否需要对数字高程地图进行处理。再对高程数据进行梯度值计算生成最大地形梯度值的灰度图,图10(a)为进行压缩处理后生成的灰度图,图10(b)为未进行压缩处理生成的灰度图。对得到的灰度值结合直升机飞行的安全距离进行二值化处理得到二值图,图11(a)为进行压缩处理后生成的二值图,图11(b)为未进行压缩处理生成的二值图。最终进行仿真验证,分别对未进行压缩处理及压缩处理后的地图采用同一起终点及同一算法(a*算法)进行航迹规划,从表1中的航迹规划结果可以看出,规划时间从18.1s缩短到7.1s,遍历栅格数也从63449降低到了24985,明显减少了算法遍历次数,航迹规划效率有明显提升。而在使用二值图进行航迹规划后,同样的起终点航迹规划时间只有0.086755,遍历栅格数也从降低到了454,极大的减少了算法遍历次数,航迹规划效率有大大提升。
[0134]
表2陕西地区丘陵地形地区地图信息及仿真数据
[0135]
地图区域陕西地区地图地图起始纬度33地图起始经度108地图终止纬度34地图终止经度109单位经度或者单位纬度的栅格数1200航迹规划起点纬度33.0842航迹规划起点经度108.393航迹规划终点纬度33.2383航迹规划终点经度108.537航迹规划路径长度26547.764203m未进行压缩处理航迹规划时间18.162194s未进行压缩处理航迹规划遍历栅格数63449进行压缩处理后航迹规划时间7.165252s进行压缩处理后航迹规划遍历栅格数24985使用二值图航迹规划时间0.086755s使用二值图航迹规划遍历栅格数454
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
