1.本发明属于自动驾驶算法技术领域,更具体涉及一种基于信号规则的自动驾驶前车切入场景提取方法。
背景技术:
2.日前自动驾驶已逐步成为汽车行业研究的重要领域,随着自动驾驶等级的提高,电脑越来越多的介入驾驶,保障自动驾驶的安全性需要越来越多的准备。据统计,大量交通事故都发生在车辆变道时,因此,自动驾驶过程中对前车切入的识别尤为重要。为了训练能够识别前车切人的视觉算法,需要大量相应场景的视频数据进行训练、测试、仿真等。而目前,通过采集车采集的视频都是连续且无特定场景标注的海量数据,且前车切入场景发生相对较少,想要人工提取该场景需要耗费大量的人力和时间。
3.中国发明专利cn202010121033.7提出了一种自动驾驶前车切入切出场景提取方法,包括:s1、在本车上安装数据采集设备,用于采集本车和目标车辆的以及车道线的数据信息;s2、结合步骤s1采集的数据信息,判断目标车辆的切入、切出,实现对该处视频或者图片的提取。该发明所述的自动驾驶前车切入切出场景提取方法可直接从场景数据库中获取满足条件的场景。无需人工比照视频来提取换道场景数据,节省人人力和时间成本。其基于目标车辆纵向距离突变来判断是否有车辆切入或切出驾驶车道的方法,但该方法无法排除由于目标车辆突然减速或加速带来的纵向距离突变,导致提取结果不够准确。
技术实现要素:
4.为解决上述问题,本发明提供了一种基于信号规则的自动驾驶前车切入场景提取方法,基于自动驾驶控制器信号,利用规则识别信号中目标车辆行驶轨迹,从而判断目标车辆是否切入本车道并提取满足信号规则时段视频,以提高提取效率,解放人力资源,达到更高提取准确率。
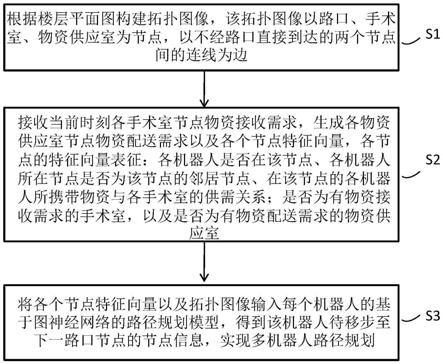
5.为了解决上述技术问题,本发明采用的技术方案是这样的:一种基于信号规则的自动驾驶前车切入场景提取方法,包括如下步骤:s1、获取本车的行驶数据和位置数据,和目标车与本车的位置关系数据,和与本车的行驶数据时间同步的视频数据;s2、根据预设的信号规则提取预设第一时间范围内的信号片段,并提取所述视频数据中与该信号片段相对应的预设第二时间范围内的视频片段;s3、对所述视频片段进行场景标记并存储。
6.作为优化,所述信号规则的预设方法,包括如下步骤:s201、预设提取信号片段的第一时间范围,并设定坐标系;s202、设定提取信号片段的开始帧触发条件,当目标车与本车的位置关系数据满足该触发条件时,记录开始帧,并执行下一步骤;s203、设定提取信号片段的结束帧触发条件,当目标车与本车的位置关系数据满
足该触发条件时,记录结束帧,并计算结束帧与开始帧的时间差,若该时间差大于所述第一时间范围,则返回s202;若该时间差小于所述第一时间范围,则执行下一步骤;s204、根据本车的行驶数据判断本车在所述时间差内的行驶状态,若本车处于行驶状态,则执行下一步骤;否则返回s202;s205、根据本车的位置数据判断本车在所述时间差内的变道状态,若本车处于变道状态,则返回s202;否则将所述结束帧记录为目标车成功切入帧,并执行下一步骤;s206、以成功切入帧为时间节点提取视频数据中预设第二时间范围内的视频片段作为切入场景视频;s207、遍历多个目标车并执行s202-s206,提取多个与目标车对应的切入场景视频。
7.作为优化,所述行驶数据包括本车的车速;所述位置数据包括本车与其两侧车道线之间的横向距离;所述目标车与本车的位置关系数据包括目标车与本车的横向距离和纵向距离。
8.作为优化,所述坐标系的设定,以本车车头的中心位置为坐标原点,以目标车车尾的中心位置为目标车的坐标点,以车道的宽度方向为横轴,以车道的长度方向为纵轴。
9.作为优化,所述开始帧的触发条件为目标车与本车的纵向距离小于预设的最大纵向距离阈值,且目标车与本车的横向距离大于预设的最大横向距离阈值。
10.作为优化,所述结束帧的触发条件为目标车与本车的纵向距离小于预设的最大纵向距离阈值,且目标车与本车的横向距离由大于预设的最大横向距离阈值变为小于预设的最小横向距离阈值,且所述时间差小于所述第一时间范围。
11.作为优化,所述行驶状态为本车的车速大于零。
12.作为优化,所述变道状态为本车与两侧车道线的左侧/右侧车道线之间的距离由大于零减小至零,再由零跳变至大于零。
13.与现有技术相比,本发明具有如下优点:1、通过采集本车的车辆状态和与目标车的位置关系,并通过判断本车及与目标车的关系是否满足预设的信号规则条件,从而方便快捷的判断是否为本车主动变道或前车切入,并根据判断结果,提取视频数据中的前车切入的场景视频,并对该场景视频进行场景标记和存储至场景库,以便于后续的筛选、运用,本发明不仅能自动提取前车切入场景,且本方法规则简单,易于实现。
14.2、通过根据位置关系和时间关系来预设判断条件,从而准确的判断前车由具有切入意图至完成切入的过程,并结合本车的车辆状态,进一步的判断是否为本车主动变道,条件规则简单,易于实现,进一步的提高了提取的准确率和效率。
15.3、本发明所设定的判断条件或触发条件或参数,均为空间位置关系或时间关系,便于通过简单的硬件设备时间,判断规则或方法简单,便于应用,进一步的提高了其准确率和提取效率。
附图说明
16.图1为本发明的总体流程图;图2为本发明的信号规则判断流程图;
图3为本发明的道路车辆示意图。
具体实施方式
17.下面将结合附图及实施例对本发明作进一步说明。
18.实施例:参见图1-图3,一种基于信号规则的自动驾驶前车切入场景提取方法,包括如下步骤:s1、获取本车的行驶数据和位置数据,和目标车与本车的位置关系数据,和与本车的行驶数据时间同步的视频数据。
19.首先,通过采集车载控制器数据和视频数据,并在时间上对齐,获取本车的行驶数据、位置数据和同步的视频数据,其中,所述行驶数据包括本车的车速;所述位置数据包括本车与其两侧车道线之间的横向距离;所述目标车与本车的位置关系数据包括目标车与本车的横向距离和纵向距离。设本车车速信号为speed,本车距左侧车道线距离为left_line_distace,距右侧车道线距离为right_line_distance,目标车车尾中心距本车车头中心横向距离为lat_distance,当目标车在本车左侧时lat_distance为负,在本车右侧时lat_distance为正,目标车车尾中心距离距本车车头纵向距离为long_distance,当目标车车尾中心点在本车车头中心点前时long_distance为正,反之为负。
20.s2、根据预设的信号规则提取预设第一时间范围内的信号片段,并提取所述视频数据中与该信号片段相对应的预设第二时间范围内的视频片段。
21.其中,所述信号规则的预设方法,包括如下步骤:s201、预设提取信号片段的第一时间范围,并设定坐标系。所述坐标系的设定,以本车车头的中心位置为坐标原点,以目标车车尾的中心位置为目标车的坐标点,以车道的宽度方向为横轴,以车道的长度方向为纵轴。根据实际路况调查,大部分的完整的切入事件都发生在8到9秒内,因此,在此实施例中,我们将从目标车有切入意图,到目标车成功切入的时间范围,即提取信号片段的第一时间范围设为8秒。
22.s202、设定提取信号片段的开始帧触发条件,当目标车与本车的位置关系数据满足该触发条件时,记录开始帧,并执行下一步骤。所述开始帧的触发条件为目标车与本车的纵向距离小于预设的最大纵向距离阈值(设为50米),且目标车与本车的横向距离大于预设的最大横向距离阈值(设为3米)。具体的,判断目标车与本车纵向距离long_distance是否小于50米(此实施例中以50米为例,可根据业务需求调节),且目标车与本车横向距离lat_distance是否大于3米,若满足,则将该时刻信号帧记为开始帧,若后续信号帧同样满足此条件,则更新开始帧。
23.s203、设定提取信号片段的结束帧触发条件,当目标车与本车的位置关系数据满足该触发条件时,记录结束帧,并计算结束帧与开始帧的时间差,若该时间差大于所述第一时间范围,则返回s202;若该时间差小于所述第一时间范围,则执行下一步骤。所述结束帧的触发条件为目标车与本车的纵向距离小于预设的最大纵向距离阈值,且目标车与本车的横向距离由大于预设的最大横向距离阈值变为小于预设的最小横向距离阈值(设为0.5米),且所述时间差小于所述第一时间范围。具体的,当出现开始帧后,判断后续信号中,是否有时刻信号满足目标车与本车横向距离lat_distance小于0.5米,目标车与本车纵向距离long_distance小于50米,且该时刻信号帧时间与开始帧时间相差在8秒内,若成立,则进
入下一步判断,若不成立则返回s202。
24.s204、根据本车的行驶数据判断本车在所述时间差内的行驶状态,若本车处于行驶状态,则执行下一步骤;否则返回s202。所述行驶状态为本车的车速大于零。具体的,本实施例假设提取到的结束帧和开始帧时间相差6秒,则判断结束帧前6秒内,本车车速speed是否大于0,若不是,返回s202,若满足则进入下一步判断。
25.s205、根据本车的位置数据判断本车在所述时间差内的变道状态,若本车处于变道状态,则返回s202;否则将所述结束帧记录为目标车成功切入帧,并执行下一步骤。所述变道状态为本车与两侧车道线的左侧/右侧车道线之间的距离由大于零减小至零,再由零跳变至大于零。具体的,判断上述6秒时间差内,是否是本车在主动变道,具体方法如下:当上述6秒内目标车lat_distance为负,即目标车在本车左侧时,判断是否是本车主动向左侧变道,即判断上诉6秒内,本车距左侧车道线距离left_line_distance是否由大于0变为小于0,再跳变为大于0(左侧车道线目标更换),若满足此条件,则说明是本车主动向左侧变道,返回s202,反之记录结束帧为目标车成功切入帧并进入下一步;当上述6秒内目标车lat_distance为正,即目标车在本车右侧时,判断是否是本车主动向右侧变道,即判断上述6秒内,本车距右侧车道线距离left_line_distace是否由大于0变为小于0,再跳变为大于0(左侧车道线目标更换),若满足此条件,则说明是本车主动向右侧变道,返回s202,反之记录结束帧为目标车成功切入帧并进入下一步;s206、以成功切入帧为时间节点提取视频数据中预设第二时间范围内的视频片段作为切入场景视频。在本实施例中,所述第二时间范围设定为成功切入帧的前后各10秒,共计20秒的时间范围,也可根据实际需要设定前后一致或不一致的时间范围。根据成功切入帧,提取成功切入帧前后10秒的信号片段作为满足条件的信号片段,并提取信号片段对应的视频片段作为切入场景视频。
26.s207、遍历多个目标车并执行s202-s206,提取多个与目标车对应的切入场景视频s3、对所述视频片段进行场景标记并存储。将视频片段(切入场景视频)存入场景库,并打上标签,以便往后筛选、运用。
27.本发明通过采集本车的车辆状态和与目标车的位置关系,并通过判断本车及与目标车的关系是否满足预设的信号规则条件,从而方便快捷的判断是否为本车主动变道或前车切入,并根据判断结果,提取视频数据中的前车切入的场景视频,并对该场景视频进行场景标记和存储至场景库,以便于后续的筛选、运用,本发明不仅能自动提取前车切入场景,且本方法规则简单,易于实现。
28.通过根据位置关系和时间关系来预设判断条件,从而准确的判断前车由具有切入意图至完成切入的过程,并结合本车的车辆状态,进一步的判断是否为本车主动变道,条件规则简单,易于实现,进一步的提高了提取的准确率和效率。
29.本发明所设定的判断条件或触发条件或参数,均为空间位置关系或时间关系,便于通过简单的硬件设备时间,判断规则或方法简单,便于应用,进一步的提高了其准确率和提取效率。
30.本发明基于自动驾驶控制器信号,利用规则识别信号中目标车辆行驶轨迹,从而判断目标车辆是否切入本车道并提取满足信号规则时段视频,以提高提取效率,解放人力资源,达到更高提取准确率。
31.最后需要说明的是,以上实施例仅用以说明本发明的技术方案而非限制技术方案,本领域的普通技术人员应当理解,那些对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。