1.本发明属于自动化技术和设备领域,具体涉及一种可自动进行口腔咽拭子采样的智能识别控制软件和采样操作设备系统。
背景技术:
2.近年来,新型冠状病毒在全球范围内肆虐,严重危害人类健康。尽早排查和隔离新型冠状病毒感染者和带毒者尤为重要和必要。利用拭子采集口腔咽侧壁黏膜表面样本,通过检验明确样本中病毒核酸存在与否,以确定或排除新型冠状病毒感染,是较精确、快捷且高效的医疗和检验技术。目前,临床通过术者手工操作采集民众口腔咽拭子样本,该操作环节的工作量较大、效率较低,耗费大量人力和物力,导致医疗人员很辛苦。因此,构建可智能识别口腔咽侧壁的软件匹配可控机械化采集咽侧壁表面标本的自动化设备是临床医学领域的巨大挑战。
3.口腔咽拭子采样是指术者手持采样棉签在受试者咽侧壁摩擦获取黏膜表面粘液标本的技术方法。该操作方法较简便、直观,但采样者的工作量较大,负担较重,容易疲劳,导致医疗资源的利用度较低。因此,口腔咽拭子采样机器人的研发需求极为迫切。
4.利用采样棉签在受试者咽侧壁黏膜表面局部擦拭便可获取黏膜表面黏液样本,经样本送至检验科进行相应的病毒核酸检测分析,可确定采样者标本中是否有病毒核酸。整个采样过程中,术者以坐位或站位持续很久,手臂持续长久时间高举易导致疲劳,术者非常辛苦;采样质量不能标准化和采样效率均较低。关于可智能化识别口腔咽侧壁的软件匹配可控机械化采集咽侧壁表面粘液标本的机器人的研究未见报道,因其适合面向广大民众对口腔咽拭子大规模采样的需求,可以满足各级医疗、防疫或其他疾病控制机构日常检验标本采集的需要,因此,该自动化设备在呼吸道传染性疾病的预防和筛查领域将具有广阔的应用前景。
技术实现要素:
5.为了克服现有技术中存在的采样者的工作量较大,负担较重,容易疲劳,导致医疗资源的利用度较低等问题,本发明的目的在于提供一种可智能化识别口腔咽侧壁的可控机械化采集咽侧壁表面粘液标本的机器人。具体是将张口定位器、齿轮运行轨道、多向定位齿轮、机械臂、照明/识别/喷气/采集工作端、中央处理器和操控手柄等软、硬件组合构成自动化智能咽拭子采样系统。
6.本发明通过如下技术方案实现:
7.一种口腔咽拭子采样机器人,包括机械手4、支撑结构3、中央处理器2及操控手柄1,所述机械手4与中央处理器2信号连接,所述操控手柄1与中央处理器2信号连接,所述支撑结构3用于支撑固定机械手4;
8.所述机械手4由转盘44及位于其上的采样工作端41、照明/识别装置42及喷气装置43组成,采样工作端41、照明/识别装置42及喷气装置43均位于转盘44的前端;所述采样工
作端41用于擦拭或摩擦蘸取靶点区域咽侧壁表面粘液;所述照明/识别装置42用于照明并识别咽侧壁表面的图像信息并传输给中央处理器2,经过甄别确定咽侧壁粘膜;所述喷气装置43用于向采样工作端41喷气清除异物;
9.所述支撑结构3由齿轮运行轨道31、多向定位齿轮32、机械臂33及基座34组成;机械臂33与机械手4的关节连接,机械臂33上套装有多向定位齿轮32,所述多向定位齿轮32接收所述中央处理器2发出的指令后在微型电动机331的带动下移向咽侧壁;所述多向定位齿轮32与所述齿轮运行轨道31的齿轮轨道齿合,可在齿轮运行轨道31上转动;所述齿轮运行轨道31硬连接固定在基座34上。
10.所述操控手柄1用于手动控制采样机器人的机械手4的启动、关闭、暂停、继续和调节采样机器人的工作参数。
11.进一步地,所述操控手柄1上设置有显示屏101、开关/暂停按钮102、功率/压力调节按钮103、工作区选择按钮104和采样调节按钮105;
12.所述显示屏101用于显示口腔咽拭子采样机器人的工作状态和参数,供医生或受试者观察;
13.所述开关/暂停按钮102用于控制口腔咽拭子采样机器人的启动、关闭和暂停;
14.所述功率/压力调节按钮103用于调节口腔咽拭子采样机器人的功率和采样工作端与咽侧壁表面的压力大小;
15.所述工作区选择按钮104用于控制机械手的工作区域,可控制机械手往复移动以实现咽侧壁表面不同区域摩擦采样;
16.所述采样调节按钮105用于控制采样工作端移动速率和压力。
17.进一步地,所述中央处理器2包括咽侧壁识别模块及机械手运动控制模块,所述咽侧壁识别模块用于将照明/识别装置42传输的咽侧壁图像信息与系统存储的相应信息进行比对和判断,并将判断结果传输给中央处理器;
18.所述机械手运动控制模块,用于收集和监测咽侧壁靶区域信息,并将反馈信号传输到中央处理器。
19.进一步地,所述多向定位齿轮32由两个不同直径大小的大齿轮及小齿轮啮合而成,所述大齿轮及小齿轮同轴,小齿轮的内圈套装在机械臂33上,小齿轮的外圈与固定在机械臂33上的微型电动机331的齿轮啮合,大齿轮的内圈与小齿轮的外圈啮合,微型电动机331带动小齿轮转动,小齿轮带动大齿轮转动。
20.进一步地,所述机械手4上还集成有压力感应调节装置411,所述压力感应调节装置411与采样工作端41相连,用于采集采样工作端41与咽侧壁粘膜表面的接触压力,压力感应调节装置411与中央处理器2信号连接,将压力信号传输给中央处理器2。
21.进一步地,所述采样工作端41的末端夹持有一次性采样器。
22.进一步地,所述照明/识别装置42上设置有用于立体成像的两个以上的摄像头,用于收集和监测咽侧壁靶区域信息,并将反馈信号传输到中央处理器。
23.进一步地,所述机械手4的转盘44通过转盘固位装置441与机械臂33连接,转盘44垂直啮合在转盘固位轨道442上,转盘44通过电机带动在转盘固位轨道442上通过齿轮啮合进行旋转。
24.进一步地,所述转盘固位轨道442两侧固定有滑行固位杆332,用于对多向定位齿
轮32进行限位,以防多向定位齿轮32滑出转盘固位轨道442。
25.与现有技术相比,本发明的优点如下:
26.本发明的一种口腔咽拭子采样机器人,结构简单,操作方便,节省人力和时间,提高采样效率,提高采样标准化和精准化,便于大规模采样,预防和避免交叉感染风险,提高受试者的舒适度和满意度,便于产业化运行。
附图说明
27.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
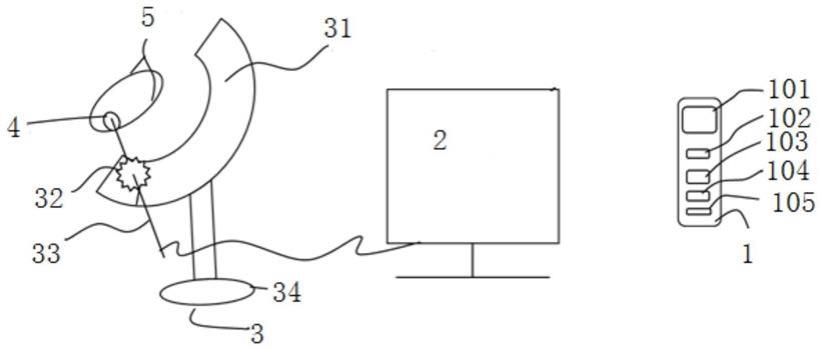
28.图1为本发明的一种口腔咽拭子采样机器人的系统示意图;
29.图2为本发明的一种口腔咽拭子采样机器人的机械手的侧视图;
30.图3为本发明的一种口腔咽拭子采样机器人的机械手的俯视图;
31.图4为本发明的一种口腔咽拭子采样机器人的整机结构示意图;
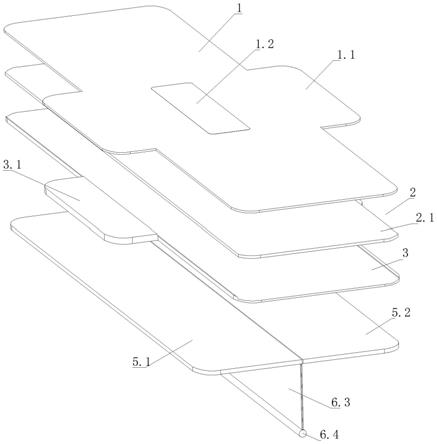
32.图5为开口定位器的正视图;
33.图6为开口定位器的侧视图;
34.图中:操控手柄1、显示屏101、开关/暂停按钮102、功率/压力调节按钮103、工作区选择按钮104和采样调节按钮105;
35.中央处理器2;
36.支撑结构3、齿轮运行轨道31、多向定位齿轮32、机械臂33、微型电动机331、滑行固位杆332、基座34;
37.机械手4、采样工作端41、照明/识别装置42、喷气装置43、转盘44、转盘固位装置441、转盘固位轨道442;
38.上下颌牙列5。
具体实施方式
39.下面将结合附图对本发明技术方案的实施例进行详细的描述,以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
40.需要注意的是,除非另有说明,本技术使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
41.为清楚、完整地描述本发明所述技术方案及其具体工作过程,结合说明书附图,本发明的具体实施方式如下:
42.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
43.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以
是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
44.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
45.实施例1
46.如图1所示,本实施例提供了一种口腔咽拭子采样机器人,包括机械手4、支撑结构3、中央处理器2及操控手柄1,所述机械手4与中央处理器2信号连接,所述操控手柄1与中央处理器2信号连接,所述支撑结构3用于支撑固定机械手4;
47.所述操控手柄1用于手动控制采样系统的启动、关闭、暂停、继续和调节采样系统的工作参数等;中央处理器2为用于进行口腔咽拭子采样的主要控制部分,包括口腔咽侧壁识别模块和机械手运动控制模块。口腔咽侧壁识别模块的作用是将机械手收集到的咽侧壁表面信息进行全面甄别、过滤和筛选,明确咽侧壁靶标;机械手运动控制模块接收中央处理器发出的移位指令启动微型电动机,后者带动机械臂移位,移位距离可通过操控手柄来调节;支撑结构3用于支撑机械臂和机械手完成口腔咽侧壁采样操作;机械手4用于直接完成口腔咽侧壁采样操作。
48.如图1所示,下面具体介绍操控手柄的结构,所述操控手柄1用于手动控制采样机器人的机械手4的启动、关闭、暂停、继续和调节采样机器人的工作参数。
49.所述操控手柄1为无线遥控器,其上设置有显示屏101、开关/暂停按钮102、功率/压力调节按钮103、工作区选择按钮104和采样调节按钮105;
50.所述显示屏101用于显示口腔咽拭子采样机器人的工作状态和参数,供医生或患者观察;
51.所述开关/暂停按钮102用于控制口腔咽拭子采样机器人的启动、关闭和暂停;
52.所述功率/压力调节按钮103用于调节口腔咽拭子采样机器人的功率和采样工作端与咽侧壁表面的压力大小;
53.所述工作区选择按钮104用于控制机械手的工作区域,可控制机械手往复移动以实现咽侧壁表面不同区域摩擦采样;
54.所述采样调节按钮105用于控制采样工作端移动速率和压力。
55.如图1所示,下面具体介绍中央处理器的结构,所述中央处理器2包括咽侧壁识别模块及机械手运动控制模块,所述咽侧壁识别模块用于将照明/识别装置42传输的咽侧壁图像信息与系统存储的相应信息进行比对和判断,并将判断结果传输给中央处理器;所述中央处理器预存储的信息包括咽侧壁的颜色、形态、质地等信息。
56.所述机械手运动控制模块,用于收集和监测咽侧壁靶区域信息,并将反馈信号传
输到中央处理器。
57.具体地,机械手运动控制模块接收所述中央处理器录入受试者身份信息和收集管信息,发出移位指令启动所述微型电动机,微型电动机带动所述机械臂移出口腔,将已完成采样的棉签置入收集管,复位且更换新的棉签。
58.如图4所示,下面具体介绍支撑结构的结构,所述支撑结构3由齿轮运行轨道31、多向定位齿轮32、机械臂33及基座34组成;机械臂33与机械手4的关节连接,机械臂33上套装有多向定位齿轮32,所述多向定位齿轮32接收所述中央处理器2发出的指令后在微型电动机331的带动下移向咽侧壁;所述微型电动机331接收中央处理器2的信号后通过启、停来控制机械手4的移位和摩擦方向;所述多向定位齿轮32与所述齿轮运行轨道31的齿轮轨道齿合,可在齿轮运行轨道31上转动;所述齿轮运行轨道31具有齿轮轨道,为所述多向定位齿轮32移位提供契合路径和稳定支撑,并为所述多向定位齿轮32提供运行轨道和辅助固位;所述齿轮运行轨道31硬连接固定在基座34上。
59.所述多向定位齿轮32由两个不同直径大小的大齿轮及小齿轮啮合而成,所述大齿轮及小齿轮同轴,小齿轮的内圈套装在机械臂33上,小齿轮的外圈与固定在机械臂33上的微型电动机331的齿轮啮合,大齿轮的内圈与小齿轮的外圈啮合,微型电动机331带动小齿轮转动,小齿轮带动大齿轮转动。
60.所述滑行固位杆332固定在转盘固位轨道442两侧,用于对多向定位齿轮32进行限位,以防多向定位齿轮32滑出转盘固位轨道442。
61.如图2及图3所示,下面具体介绍机械手的结构,所述机械手4由转盘44及位于其上的采样工作端41、照明/识别装置42及喷气装置43组成,采样工作端41、照明/识别装置42及喷气装置43均位于转盘44的前端;所述采样工作端41受中央处理器2调控直接完成咽侧壁表面粘液的收集;所述照明/识别装置42用于照明并识别咽侧壁表面的图像信息并传输给中央处理器2,经过甄别确定咽侧壁粘膜;所述喷气装置43用于向采样工作端41喷气清除异物,通过操控手柄1的喷淋调节按钮105手动调节;
62.所述机械手4上还集成有压力感应调节装置411,所述压力感应调节装置411与采样工作端41相连,用于采集采样工作端41与咽侧壁粘膜表面的接触压力,该压力可通过操控手柄1的功率/压力调节装按钮103手动调节;压力感应调节装置411与中央处理器2信号连接,将压力信号传输给中央处理器2。
63.所述机械手4的转盘44通过转盘固位装置441与机械臂33连接,转盘44垂直啮合在转盘固位轨道442上,转盘44通过电机带动在转盘固位轨道442上通过齿轮啮合进行旋转。转盘44调节采样工作端41与咽侧壁粘膜表面的接触角度,并通过转盘固位装置441和转盘固位轨道442的契合来固定采样工作端41的工作位置。
64.所述照明/识别装置42上设置有用于立体成像的两个以上的摄像头,用于收集和监测咽侧壁靶区域信息,并将反馈信号传输到中央处理器。
65.所述采样工作端41的末端夹持有一次性采样器。
66.以上为根据本发明的实施例1的用于口腔咽拭子采样机器人的具体构造。下面结合图2-4描述采样工作端41以口腔咽侧壁采样的过程为例介绍口腔咽拭子采样机器人的工作原理,具体如下:
67.首先,受试者以坐位,采用张口定位器(如图5及图6所示,实施例2详细介绍其结
构)支撑上下牙列,齿轮运行轨道31、多向定位滑轮32和机械臂33定位和固定机械手4,照明/识别装置42向中央处理器2传输口腔咽侧壁图像信息,经过咽侧壁识别模块的辨别确认咽侧壁采样区域,中央处理器2发出指令启动采样工作端41和喷气装置43实施咽侧壁表面粘液采样操作。
68.其次,照明/识别装置42向中央处理器2传输咽侧壁表面图像信息,经过咽侧壁识别模块的辨别确认咽侧壁采样区域、收集管标签和受试者身份信息,中央处理器2确认受试者信息并发出指令启动或关闭采样工作端41和喷气装置43。
69.再次,中央处理器2发出指令启动固定在机械臂上的微型电动机331通过与多向定位齿轮32的小直径齿轮契合提供机械臂33运行动力,并与滑行固位杆332共同控制机械臂33运动并稳定在另一部位,重复上述行为。
70.最后,直至咽侧壁表面粘液采样完成,照明/识别装置42向中央处理器2传输信息,中央处理器2传输指令指挥机械手移出口腔,中央处理器2将机械手4旋转180
°
调整方向,将已经采样的棉签置入收集管。更跟换新的棉签,为下一个受试者做好采样准备或者无后续受试者则系统自动关机。
71.实施例2
72.实施例1介绍了受试者以坐位进行的利用口腔咽拭子采样机器人进行采样的全过程,受试者的坐位姿态会使其稍感疲惫。对于卧床行动不便的受试者,拟进行平卧位或侧卧位进行咽拭子采样,需要利用开口定位器(图5及图6所示)支撑上、下颌牙列,所述张口定位器用于辅助撑开上、下颌牙列,推开和保护邻近的舌根和唇颊黏膜等软组织,帮助患者稳定上、下颌牙弓;所述开口定位器具有唇、颊、舌侧遮挡装置,用于保护唇颊舌软组织,同时改用偶联吸唾管的开口定位器进行吸唾操作即可;为调整机械手4的工作,转盘44调节采样工作端41与咽侧壁表面形成适当的接触角度,并通过调节转盘固位装置441与转盘固位轨道442稳定契合来固定采样工作端41的工作位置便可完成咽侧壁表面粘液标本的采集。本发明的实施例2的其他部件与实施例1相同,在此不再赘述。
73.以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。
74.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
75.此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。