技术特征:
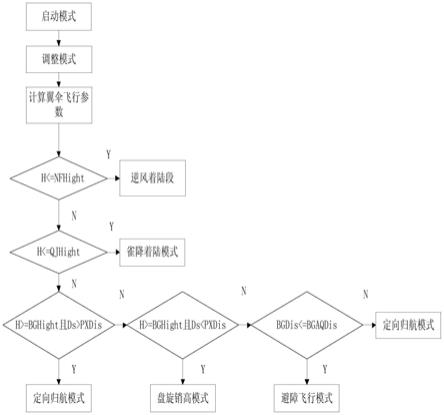
1.一种采用可控翼伞实现火箭助推器多目标定点回收避障方法,其特征在于,包括如下步骤:s1确定火箭助推器落区范围内的>1个目标点和>1个避障区,将避障区的几何中心作为避障点;s2使翼伞进入最优目标点锁定模式,根据翼伞的飞行状态参数在>1个目标点中锁定最优目标点;s3获取翼伞的飞行状态参数,所述翼伞的飞行状态参数包括翼伞高度信息,翼伞与最优目标点的距离,以及翼伞与最近避障点的距离;s4根据翼伞的飞行状态参数使翼伞进入定向归航模式,盘旋销高模式,避障飞行模式,逆风着陆模式或雀降着陆模式;s5循环进行步骤s2~s4,实现火箭助推器的实时回收及避障飞行。2.根据权利要求1所述的一种采用可控翼伞实现火箭助推器多目标定点回收避障方法,其特征在于,记翼伞高度为h,翼伞与最优目标点的距离为ds,翼伞与最近避障点的距离为bgdis,所述步骤s4的具体步骤包括:s4.1判断h是否≤逆风高度nfhight,如果是,翼伞进入逆风着陆模式,如果否,进入步骤s4.2;s4.2判断h是否≤雀降高度qjhight,如果是,翼伞进入雀降着陆模式,如果否,进入步骤s4.3;s4.3判断是否同时满足h≥避障模式判断高度bghight且ds>盘旋距离pxdis,如果是进入定向归航模式,如果否进入步骤s4.4;s4.4判断是否同时满足h≥避障模式判断高度bghight且ds≤盘旋距离pxdis,如果是进入盘旋销高模式,如果否进入步骤s4.5;s4.5判断是否同时满足h<避障模式判断高度bghight且bgdis≤避障安全距离bgaqdis,如果是进入避障飞行模式,如果否进入步骤s4.6;s4.6进入定向归航模式。3.根据权利要求1或2所述的一种采用可控翼伞实现火箭助推器多目标定点回收避障方法,其特征在于,定向归航模式时,翼伞沿与最优目标点的连线向最优目标点直线靠近;盘旋销高模式时,翼伞围绕最优目标点盘旋下降;避障飞行模式时,翼伞沿与最近避障点的连线直线远离最近避障点;逆风着陆模式时,翼伞沿与风向来流方向相反方向飞行;雀降着陆模式时,翼伞的水平和垂直速度同时降低到最小值。4.根据权利要求1所述的一种采用可控翼伞实现火箭助推器多目标定点回收避障方法,其特征在于,所述步骤s2中,最优目标点为与翼伞投影点距离最近的目标点;所述步骤s3中,最近避障点为与翼伞投影点距离最近的避障点。5.根据权利要求1所述的一种采用可控翼伞实现火箭助推器多目标定点回收避障方法,其特征在于,所述步骤s2中,最优目标点的锁定方法如下:s2.1根据如下公式计算翼伞投影点与每个目标点的距离:
其中,distance为翼伞投影点距离任一目标点距离,radius为地球半径,la_para为翼伞投影点纬度,lon_para为翼伞投影点经度,la_destination为任一目标点纬度,lon_destination为任一目标点经度;s2.2将距离翼伞投影点最近目标点设为最优目标点。6.根据权利要求2所述的一种采用可控翼伞实现火箭助推器多目标定点回收避障方法,其特征在于,所述步骤s4中,将避障区等效为圆形区域,避障安全距离bgaqdis为避障区的几何中心至避障区边缘的距离。7.根据权利要求2所述的一种采用可控翼伞实现火箭助推器多目标定点回收避障方法,其特征在于,所述步骤s4中,避障模式判断高度bghight的确定方法为:bghight≥bgaqdis/ra;其中,bgaqdis为避障安全距离,ra为翼伞的滑翔比。8.根据权利要求2所述的一种采用可控翼伞实现火箭助推器多目标定点回收避障方法,其特征在于,所述步骤s4中,雀降高度qjhight的确定方法为:其中,s
p
为翼伞的下降速度,单位为mm/s;s
m
为电机的转速,单位为r/min;l为翼伞的最大操纵量,r为电机的绞盘半径,l和r的单位为mm;雀降高度qjhight的单位为mm;所述步骤s4中,逆风高度nfhight的确定方法为:nfhight≥2
×
π
×
r
p
/ra qjhight;其中,r
p
为翼伞最小转弯半径;ra为翼伞的滑翔比。9.根据权利要求2所述的一种采用可控翼伞实现火箭助推器多目标定点回收避障方法,其特征在于,所述步骤s4中,盘旋距离pxdis的确定方法为:2r
p
≥pxdis≥r
p
;其中,r
p
为翼伞最小转弯半径。10.根据权利要求2所述的一种采用可控翼伞实现火箭助推器多目标定点回收避障方法,其特征在于,所述s2中,首先使翼伞进入翼伞稳定模式,对控制程序进行初始化并将翼伞调整到待操纵状态,再使翼伞进入最优目标点锁定模式。
技术总结
本发明公开了采用可控翼伞实现火箭助推器多目标定点回收避障方法,首先确定多个目标点和避障点,然后锁定最优目标点,接着进行飞行阶段判断,通过翼伞高度和距离组合判断翼伞所处的飞行阶段。定向归航阶段翼伞朝向最优目标点飞行;盘旋销高阶段翼伞围绕最优目标点盘旋下降;避障飞行阶段翼伞向着和最近避障点连线方向的反方向避障,如果远离最近避障区,则重新进入定向归航阶段;逆风着陆阶段将翼伞的飞行方向调整成和风向来流方向相反;雀降着陆阶段翼伞使水平和垂直速度同时降低至最小值。本发明针对落区目标点和避障区,在稳定精准降落于目标点区域范围前提下同时实现了对避障区的有效规避,对航天器返回与着陆技术领域研究具有深远意义。究具有深远意义。究具有深远意义。
技术研发人员:李春 周朋 焦猛 白先民 刘海烨 许望晶 刘涛 刘靖雷 张章 王洁 滕海山
受保护的技术使用者:北京空间机电研究所
技术研发日:2021.12.20
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。