技术特征:
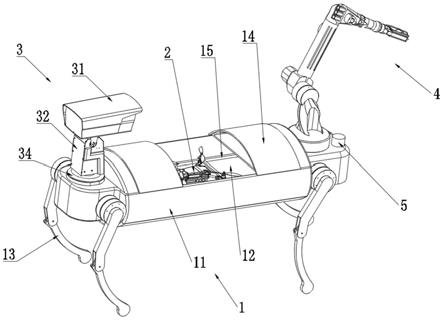
1.一种用于变电站巡检用的四足机器人及无人机组件,其特征在于:包括机器人本体(1)和巡检无人机(2),机器人本体(1)包括机身(11)、设置在机身(11)内部的机巢(12)以及若干与机身(11)连接用于行走的机足(13);巡检无人机(2)设置在机巢(12)内,机巢(12)顶端开口设置且开口两侧滑动连接有滑动盖门(14);机身(11)内部底端设置有控制系统仓(111),控制系统仓(111)内设置有:控制模块(10):用于接收、计算、处理和传输数据;电源模块(20):与控制模块(10)电连接,用于提供电能;传感器模块(30):与控制模块(10)电连接,用于向控制模块(10)反馈电信号;驱动模块(40):与控制模块(10)电连接,用于根据控制模块(10)的指令驱动各部件运动;数据存储模块(50):与控制模块(10)电连接,用于暂存巡检工作过程中采集到的数据;通讯模块(60):与控制模块(10)电连接,用于巡检工作过程中采集到的数据回传到巡检监控室(70);机身(11)的后端设置有用于采集巡检场地的实时图像的巡检摄像模块(3),且巡检摄像模块(3)与数据存储模块(50)通讯连接,机身(11)的前端设置有与驱动模块(40)通讯连接的机械臂(4),机械臂(4)包括依次转动连接的底座(41)、第一连接臂(42)和第二连接臂(43),底座(41)与机身(11)转动连接,第二连接臂(43)自由端转动连接有u型连接件(45),u型连接件(45)的u型槽内转动连接有前置摄像头(44),前置摄像头(44)与数据存储模块(50)通讯连接,u型连接件(45)侧面设置有安装块(431),安装块(431)内滑动连接有由驱动模块(40)驱动运动的伸缩电容笔(432),伸缩电容笔(432)一端伸出安装块(431)设置。2.根据权利要求1所述的一种用于变电站巡检用的四足机器人及无人机组件,其特征在于:巡检摄像模块(3)包括从上至下依次连接的图像采集装置(31)、云台(32)和升降机构(34),云台(32)内部还设置有用于驱动云台(32)转动的转动机构(33)和用于驱动图像采集装置(31)上下摆动的摆动机构(35),图像采集装置(31)底端设置有倒置的u型连接架(315),u型连接架(315)两端固定在云台(32)顶端两侧。3.根据权利要求2所述的一种用于变电站巡检用的四足机器人及无人机组件,其特征在于:图像采集装置(31)内还设置有红外热成像仪(312),图像采集装置(31)的镜头(313)前端还设置有雨刷(311),雨刷(311)与图像采集装置(31)外壳转动连接,镜头(313)底端还设置有第二补光灯(314)。4.根据权利要求2所述的一种用于变电站巡检用的四足机器人及无人机组件,其特征在于:升降机构(34)包括活动圆台(341)和升降电机(342),活动圆台(341)侧面对称设置有一对卡接平面(3411),机身(11)上设置有与活动圆台(341)形状相适应的安装孔,活动圆台(341)上下活动嵌设在安装孔内且顶端伸出安装孔后与云台(32)底端连接,升降电机(342)设置在活动圆台(341)底端,升降电机(342)输出端向上设置且连接有丝杆(344),丝杆(344)自由端螺纹贯穿固定在活动圆台(341)底端的固定圆盘(343)后伸入到活动圆台(341)内部。5.根据权利要求2所述的一种用于变电站巡检用的四足机器人及无人机组件,其特征在于:转动机构(33)包括转动电机(331)以及相互配合传动且均设置在云台(32)内部底端的第一蜗轮(333)和第一蜗杆(334),转动电机(331)通过皮带(332)与第一蜗杆(334)传动
连接,第一蜗轮(333)底端固定有传动连接件,传动连接件底端转动贯穿云台(32)底端后与活动圆台(341)固定连接。6.根据权利要求2所述的一种用于变电站巡检用的四足机器人及无人机组件,其特征在于:摆动机构(35)包括摆动电机(351)、转轴(353)以及相互配合传动的第二蜗杆(352)和第二蜗轮(354),摆动电机(351)输出端与第二蜗杆(352)传动连接,转轴(353)与第二蜗轮(354)固定套接,且转轴(353)两端转动贯穿云台(32)侧壁后与u型连接架(315)两端固定连接。7.根据权利要求1所述的一种用于变电站巡检用的四足机器人及无人机组件,其特征在于:巡检无人机(2)前端设置有拍摄摄像头(21)和第一补光灯(22),巡检无人机(2)底端还设置有支撑架(24),支撑架(24)与机巢(12)底端通过磁力吸附连接,巡检无人机(2)顶端还设置有天线(23)。8.根据权利要求1所述的一种用于变电站巡检用的四足机器人及无人机组件,其特征在于:机足(13)包括下肢(131)、上肢(132)和肩部(133),上肢(132)一端与下肢(131)铰接,另一端侧面一体设置有连接壳(1321),肩部(133)侧面设置有传动轴(1331),传动轴(1331)与机身(11)内设置的第一驱动电机传动连接,肩部(133)内部设置有第二驱动电机,第二驱动电机与连接壳(1321)传动连接,连接壳(1321)内设置有第三驱动电机,第三驱动电机输出端传动连接有圆形连接件(1312),下肢(131)与圆形连接件(1312)之间设置有连接杆(1311),且连接杆(1311)一端与下肢(131)铰接,另一端与圆形连接件(1312)偏离圆心的位置铰接。9.根据权利要求1所述的一种用于变电站巡检用的四足机器人及无人机组件,其特征在于:传感器模块(30)包括设置在机身(11)前端的激光雷达(5)以及设置在控制系统仓(111)内的陀螺仪和霍尔传感器。10.根据权利要求1所述的一种用于变电站巡检用的四足机器人及无人机组件,其特征在于:机巢(12)内还设置有呈矩形设置的限位架(15)。
技术总结
本发明涉及一种用于变电站巡检用的四足机器人及无人机组件,属于电力系统设备技术领域,包括机器人本体和巡检无人机,机器人本体包括机身、设置在机身内部的机巢以及若干与机身连接用于行走的机足;巡检无人机设置在机巢内,机巢顶端开口设置且开口两侧滑动连接有滑动盖门;机身内部底端设置有控制系统仓,控制系统仓内设置有控制模块、电源模块、传感器模块、驱动模块、数据存储模块和通讯模块;机身的后端设置有巡检摄像模块,且巡检摄像模块与数据存储模块通讯连接,机身的前端设置有机械臂。本发明降低了变电站巡检人员的工作强度,降低了巡检过程中的触电风险,并且解决了巡检机器人巡检过程中存在拍摄盲区的问题。机器人巡检过程中存在拍摄盲区的问题。机器人巡检过程中存在拍摄盲区的问题。
技术研发人员:佘锐 连晖 周源 郑瑞忠 陈倩筠 陈群伟 刘宇轩 谢毅 黄娟娟
受保护的技术使用者:国网福建省电力有限公司宁德供电公司
技术研发日:2022.01.26
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。