1.本发明属于故障诊断技术领域,更具体地,涉及一种跨尺寸电机轴承故障诊断模型的构建方法及应用。
背景技术:
2.轴承是电机最基本的部件之一,在起着连接旋转部分作用的同时,也作为支撑部分,承受着一定的载荷。因此,轴承在正常使用的过程中,不可避免地会受到机械应力等一系列作用的影响,在日积月累的使用之中会受到磨损,腐蚀。据不完全统计,电机的40%的故障由滚动轴承故障引起。而一旦发生故障,如未能及时检测到故障或未能有效地排查和修复潜在的故障,将会导致机械设备的进一步损坏并影响工业生产,甚至可能危及工作人员的生命安全,从而造成巨大损失。
3.目前,以深度学习方法为代表的电机轴承机械健康状态检测逐渐成为故障诊断方法的一种主流。深度学习模型相比于传统模型网络层数更深,非线性运算能力强,能够更好的逼近复杂函数关系,在故障诊断领域有不少成功的应用。但是深度学习故障诊断的成功依赖于大量有标签的优质数据,目前,由于故障轴承样本的数据采集往往需要耗费大量的人力和时间,监测数据异常样本对于深度学习的需求而言存在着不足的现象。而对于不同尺寸的电机轴承样本而言,故障轴承样本的数据会发生改变,而导致原有的数据难以适用于新故障轴承的监测训练。
技术实现要素:
4.针对现有技术的以上缺陷或改进需求,本发明提供一种跨尺寸电机轴承故障诊断模型的构建方法及应用,用以解决现有技术由于难以获取大量有标签的优质数据而导致的电机轴承故障诊断准确率较低的技术问题。
5.总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
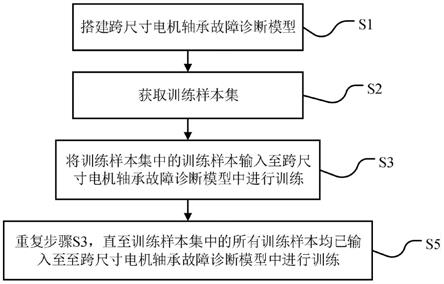
6.为了实现上述目的,第一方面,本发明提供了一种跨尺寸电机轴承故障诊断模型的构建方法,包括以下步骤:
7.s1、搭建跨尺寸电机轴承故障诊断模型;其中,跨尺寸电机轴承故障诊断模型包括:级联的跨尺寸数据生成模块、特征提取模块和daan网络;跨尺寸数据生成模块包括并联的第一timegan网络、第二timegan网络、第三timegan网络和第四timegan网络;特征提取模块包括并联的第一特征提取单元和第二特征提取单元;第一timegan网络和第三timegan网络的输出端分别与第一特征提取单元的输入端相连;第二timegan网络和第四timegan网络的输出端分别与第二特征提取单元的输入端相连;daan网络用于对输入的轴承数据特征进行迁移学习,以对其健康状态进行预测;
8.s2、获取训练样本集;其中,训练样本集中的训练样本包括两种不同尺寸的轴承数据,记为(na,fa,nb);na为轴承a正常状态下的振动加速度及其对应的工况;fa为轴承a故障状态下的振动加速度及其对应的工况;nb为轴承b正常状态下的振动加速度及其对应的工况;
各训练样本的工况均相同;
9.s3、将训练样本集中的训练样本(na,fa,nb)输入至跨尺寸电机轴承故障诊断模型中进行训练:
10.分别将na经由第一timegan网络、nb经由第二timegan网络输入至跨尺寸电机轴承故障诊断模型中,以对第一timegan网络、第二timegan网络和daan网络进行训练,并计算此时第一特征提取单元和第二特征提取单元输出的特征之间的距离dis
12
;
11.将fa分别经由第三timegan网络和第四timegan网络输入至跨尺寸电机轴承故障诊断模型中,计算此时第一特征提取单元和第二特征提取单元输出的特征之间的距离dis
34
;在最小化dis
34
、dis
12
、以及dis
34
与dis
12
的距离差的前提下,对第三timegan网络、第四timegan网络和daan网络进行训练;
12.s4、重复步骤s3,直至训练样本集中的所有训练样本均已输入至至跨尺寸电机轴承故障诊断模型中进行训练。
13.进一步优选地,训练数据集中的振动加速度的获取方法,包括:对采集到的原始振动加速度信号进行数据截取后,进行角域重采样。
14.进一步优选地,训练数据集中的振动加速度的获取方法,包括:对采集到的原始振动加速度信号进行数据截取后,依次进行降噪处理和角域重采样。
15.进一步优选地,轴承的健康状态包括:正常状态和故障状态;其中,故障状态包括外圈故障、内圈故障、滚动体故障和保持架故障。
16.进一步优选地,第一timegan网络、第二timegan网络及第三timegan网络均用于考虑时序关联性,生成与输入的轴承数据相似的轴承数据;
17.第四timegan网络用于基于轴承a和轴承b的正常状态下的轴承数据之间的差异性以及轴承a故障状态下的轴承数据,并考虑时序关联性,生成轴承b故障状态下的轴承数据。
18.进一步优选地,daan网络包括:特征提取器、标签分类器、全局域判别器和局部域判别器;标签分类器、全局域判别器和局部域判别器相互并联,且分别与特征提取器的输出端相连;局部域判别器包括c个相互并联的局部域判别器;c为轴承的健康状态类别数;
19.在模型的训练过程中:
20.以特征提取模块输入的轴承a轴承数据特征为源域数据、轴承b的轴承数据特征为目标域数据;
21.特征提取器用于分别提取源域数据和目标域数据的与轴承健康状态类别相关的域不变特征;
22.标签分类器用于将源域数据的域不变特征映射为对应的健康状态类别,并度量其与真实健康状态类别的差异;
23.全局域判别器用于对齐源域数据和目标域数据的域不变特征之间的边缘分布;
24.局部域判别器用于分别对齐每一类健康状态下的源域数据和目标域数据的域不变特征之间的条件分布;
25.在模型的应用过程中:
26.特征提取器用于提取待诊断轴承数据的与轴承健康状态类别相关的域不变特征;
27.标签分类器用于将待诊断轴承数据的域不变特征映射为对应的健康状态类别。
28.第二方面,一种跨尺寸电机轴承故障诊断方法,包括:将待诊断的轴承数据输入到
采用本发明第一方面所提供的跨尺寸电机轴承故障诊断模型的构建方法所构建的跨尺寸电机轴承故障诊断模型中的daan网络中,从而得到待诊断的轴承数据的健康状态。
29.第三方面,本发明提供了一种跨尺寸电机轴承故障诊断方法,包括:存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时执行本发明第二方面所提供的跨尺寸电机轴承故障诊断方法。
30.第四方面,本发明提供了一种机器可读存储介质,所述机器可读存储介质存储有机器可执行指令,所述机器可执行指令在被处理器调用和执行时,所述机器可执行指令促使所述处理器实现本发明第一方面所提供的跨尺寸电机轴承故障诊断模型的构建方法和/或本发明第二方面所提供的跨尺寸电机轴承故障诊断方法。
31.总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
32.1、本发明提供了一种跨尺寸电机轴承故障诊断模型的构建方法,构建了一种基于timegan网络和daan网络的模型,通过timegan网络捕获加速度信号随时间变化的潜在复杂特征(即加速度跨时间的潜在复杂动态特征),同时生成新的加速度的时间序列数据,扩充了跨尺寸的故障轴承的样本,并使用daan网络对原有故障数据进行对抗迁移,根据已知正常和故障样本的数据的轴承,结合不同尺寸的轴承的正常样本数据,度量不同尺寸轴承正常样本间距离,并通过约束生成的跨工况数据的故障样本对应故障类别间满足相同的距离,对所构建的模型进行端到端训练,解决了新轴承仅有正常样本无故障样本情况下的故障诊断问题,大大提高了电机轴承故障诊断的准确率。
33.2、本发明所提供的跨尺寸电机轴承故障诊断模型的构建方法,由于原始采集的轴承信号受复杂工况的影响,含有大量噪声,属于非平稳的过程信号,本发明对所采集到的轴承数据依次进行滑动时间窗截取、小波降噪、和角域重采样,使得用于模型训练的样本具有平稳特性,同时也具备了角域重采样后的时域实际物理意义,进一步提高了轴承故障诊断准确率。
34.3、针对现有的基于深度学习的轴承故障诊断方法往往需要采集大量的故障轴承的数据的问题,本发明引入了时间序列生成对抗网络,扩充了故障轴承的样本,对后续故障诊断的训练过程提供更多数据,解决了异常样本匮乏带来的模型训练效果较差问题,节省了收集样本的人力成本和时间成本。
35.4、本发明所提供的跨尺寸电机轴承故障诊断模型的构建方法中,用于模型训练的加速度数据带有转速标签(工况标签),可以通过分别采用不同转速下的训练样本训练多个跨尺寸电机轴承故障诊断模型,从而得到跨尺寸条件下不同转速正异常样本的分布。通过将多个小模型任务的高度细化,有效地降低了计算复杂度,提高了模型的精度,增强了生成数据的实用性。
36.5、本发明所提供的跨尺寸电机轴承故障诊断模型的构建方法,通过所提出的跨尺寸轴承正常样本间距离与故障样本间距离最小的的多尺度(可以通过单个或多个距离施加损失函数)约束,可以有效提升时间对抗生成网络的生成质量,使得生成的样本更满足先验性物理约束。
附图说明
37.图1为本发明实施例1提供的跨尺寸电机轴承故障诊断模型的构建方法流程图;
38.图2为本发明实施例1提供的跨尺寸电机轴承故障诊断模型结构示意图;
39.图3为本发明实施例1提供的timegan网络的结构示意图;
40.图4为本发明实施例1提供的daan网络的结构示意图。
具体实施方式
41.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
42.实施例1、
43.一种跨尺寸电机轴承故障诊断模型的构建方法,如图1所示,包括以下步骤:
44.s1、搭建跨尺寸电机轴承故障诊断模型;具体地,如图2所示,跨尺寸电机轴承故障诊断模型包括:级联的跨尺寸数据生成模块、特征提取模块和daan网络;跨尺寸数据生成模块包括并联的第一timegan网络、第二timegan网络、第三timegan网络和第四timegan网络;特征提取模块包括并联的第一特征提取单元和第二特征提取单元;第一timegan网络和第三timegan网络的输出端分别与第一特征提取单元的输入端相连;第二timegan网络和第四timegan网络的输出端分别与第二特征提取单元的输入端相连;daan网络用于对输入的轴承数据特征进行迁移学习,以对其健康状态进行预测。
45.s2、获取训练样本集;其中,训练样本集中的训练样本包括两种不同尺寸的轴承数据,记为(na,fa,nb);na为轴承a正常状态下的振动加速度及其对应的工况;fa为轴承a故障状态下的振动加速度及其对应的工况;nb为轴承b正常状态下的振动加速度及其对应的工况;各训练样本的工况均相同;
46.具体地,本实施例中,通过电机上的加速度传感器每次对单一轴承故障采集数据,每次采集的数据包括采集时间、轴承各通道振动加速度、轴承转速(工况)、以及轴承的健康状态标签,并通过硬件设备进行上传。可以通过对采集到的原始振动加速度信号进行数据截取后,进行角域重采样,来构建训练样本集。进一步地,还可以对采集到的原始振动加速度信号进行数据截取后,依次进行降噪处理和角域重采样。具体步骤如下:
47.1)基于滑动时间窗对现有数据进行截取:通过单位长度为2048的“窗口”来框住已知时间序列,对振动信号段进行截取,计算框内的均值等统计指标,获取单位时间窗滑块内的数据,来缩小数据范围,这样做可以削弱短期波动对轴承故障数据产生的影响。
48.2)利用小波变换进行降噪处理:为了去除原有数据中的噪声,本实施例选用的小波变换法进行降噪处理,包括如下步骤:a、选定一组正交小波基和分解层数n,对原始振动信号进行n层小波分解,将原始振动信号分为多个小频带。b、对第1到第n层的每一层高频系数,使用软阈值量化方法进行处理。c、根据小波分解的第n层的低频系数和经过处理后的第1层到第n层的高频系数进行信号重构,从而得到原始振动信号的估计值。
49.3)对所得信号进行角域重采样:为解决采集数据没有标定信号导致的时间尺度上数据不同步现象,本发明对故障样本进行角域重采样。具体的,本发明利用相邻采样点间的信号的线性变化假设,建立振动信号与转速信号的关系,实现振动信号依据角度信号的重采样,对齐角度信号。需要说明的是,利用上述方法所得到的角域重采样信号具有平稳特
性,同时也具备了时间域采样的实际物理意义,更易于进行后续步骤对时域和频域特征的提取。
50.为了在后续的迁移学习中提供更多异常样本的数据进行训练,本发明提出了一种分别提取异常样本的静态和驱动端加速度,基于timegan网络对异常样本数据进行的智能的、自动的数据生成方法。
51.s3、将训练样本集中的训练样本(na,fa,nb)输入至跨尺寸电机轴承故障诊断模型中进行训练:
52.分别将na经由第一timegan网络、nb经由第二timegan网络输入至跨尺寸电机轴承故障诊断模型中,以对第一timegan网络、第二timegan网络和daan网络进行训练(在这个过程中更新第一timegan网络、第二timegan网络、第一特征提取单元、第二特征提取单元和daan网络中的参数),并计算上述训练完成后第一特征提取单元和第二特征提取单元输出的特征之间的距离dis
12
;
53.将fa分别经由第三timegan网络和第四timegan网络输入至跨尺寸电机轴承故障诊断模型中,计算此时第一特征提取单元和第二特征提取单元输出的特征之间的距离dis
34
;在最小化dis
34
、dis
12
、以及dis
34
与dis
12
的距离差的前提下,对第三timegan网络、第四timegan网络和daan网络进行训练(在这个过程中更新第三timegan网络、第四timegan网络、第一特征提取单元、第二特征提取单元和daan网络中的参数);
54.s4、重复步骤s3,直至训练样本集中的所有训练样本均已输入至至跨尺寸电机轴承故障诊断模型中进行训练。
55.需要说明的是,第一timegan网络、第二timegan网络及第三timegan网络均用于考虑时序关联性,生成与输入的轴承数据相似的轴承数据;
56.第四timegan网络用于基于轴承a和轴承b的正常状态下的轴承数据之间的差异性以及轴承a故障状态下的轴承数据,并考虑时序关联性,生成轴承b故障状态下的轴承数据。
57.需要说明的是,timegan网络将工况因素转速考虑为静态特征,将驱动端加速度考虑为时态特征,由此可以得到一系列某一转速下,故障样本驱动端加速度的值。如图3所示,timegan网络包括嵌入函数、恢复函数、序列生成器和序列判别器四个组件。使用嵌入函数分别将轴承转速和驱动端加速度映射到潜在空间中,实现特征的降维;生成器先将从分布中采样得到的转速特征降维,再依据此降维后的转速特征、上一个时刻的低维加速度特征和当前的驱动端加速度,生成新的低维度的加速度特征向量;使用序列判别器分别对生成的转速特征和加速度特征进行检验,通过能够代表真实情况的故障样本数据;学习完成后,恢复函数对潜在空间中的转速和驱动端加速度特征进行逆映射,复原重构为原来的特征。
58.其中,嵌入函数(es(
·
)和e
x
(
·
))和恢复函数(rs(
·
)和r
x
(
·
))提供特征和潜在空间之间的映射;具体地,嵌入函数实现特征的降维,先将轴承转速s映射到更低维的hs,再将驱动端加速度x
t
映射到更低维的特征h
t
,过程如下:
59.hs=es(s)
60.h
t
=e
x
(hs,h
t-1
,x
t
)
61.进一步的,当网络对更低维度的特征学习后,恢复函数再对潜在空间中的特征进行逆映射,复原为原来的特征,具体的,对于轴承转速和驱动端加速度的逆映射过程如下:
62.[0063][0064]
为了保证对原始数据重构的精确性,本发明构建的损失函数具体如下:
[0065][0066]
其中,lr表示距离重建损失,s、x
t
分别表示原始的转速、t时刻的加速度,分别表示重构后的转速、及t时刻的加速度。本发明通过最小化此损失函数的来确保重构的精确性。
[0067]
进一步地,timegan中的生成器分为gs(
·
)和g
x
(
·
)两个部分,其中,生成器gs(
·
)将通过对分布进行随机采样得到的轴承转速的随机向量zs,转化成低维度的静态变量生成器g
x
(
·
)再根据生成的轴承转速特征向量上一个生成的和通过高斯分布和维纳过程得到的当前的驱动端加速度z
t
生成低维度的驱动端加速度特征向量过程如下:
[0068][0069][0070]
本发明选用cnn作为轴承转速的判别器,用双向rnn作为驱动端加速度的判别器,对假数据输出0,对真实数据输出1,过程如下:
[0071][0072][0073]
进一步的,上式中所用rnn网络得到的过程如下:
[0074][0075][0076]
timegan网络对于静态特征轴承转速采用无监督学习,引入两个判别器产生的输出而对于时态特征驱动端加速度则采用监督学习的方式;对无监督学习和监督学习构建的损失函数分别如下:
[0077][0078][0079]
其中,lu、ls分别表示无监督、监督学习所采用的损失函数;ys、y
t
是原有样本转速、加速度的标签;表示判别器对生成的转速、加速度进行判断产生的输出;hs表示降维后的转速特征,h
t
表示降维后t时刻的加速度特征。
[0080]
根据计算的损失函数,对嵌入函数、恢复函数、生成器和判别器所做优化如下:
[0081]
[0082][0083]
其中,θe、θr、θg、θd分别表示嵌入网络、恢复网络、生成器和判别器的参数,其中,λ、η是为了平衡损失引入的超参数。
[0084]
timegan网络能够捕获加速度跨时间的潜在的复杂动态,同时生成新的在不同转速情况下加速度的时间序列数据,为后续进行跨尺寸的数据生成增加故障样本。
[0085]
进一步地,为了获得跨尺寸的轴承故障数据,例如将上述训练生成的已知故障样本标签的轴承a的数据应用在另一个尺寸的轴承b上,本发明使用daan网络对原有故障数据进行迁移,其目的在于根据已知正常和故障样本的数据的轴承,结合不同尺寸的轴承的正常样本数据,迁移生成某一转速下,不同尺寸的轴承的故障样本数据分布。具体地,如图4所示,daan网络包括:特征提取器、标签分类器、全局域判别器和局部域判别器;标签分类器、全局域判别器和局部域判别器相互并联,且分别与特征提取器的输出端相连;局部域判别器包括c个相互并联的局部域判别器;c为轴承的健康状态类别数;
[0086]
在模型的训练过程中,以特征提取模块输入的轴承a轴承数据特征为源域数据、轴承b的轴承数据特征为目标域数据,交替输入至daan网络中;特征提取器用于分别提取源域数据和目标域数据的与轴承健康状态类别相关的域不变特征;标签分类器用于将源域数据的域不变特征映射为对应的健康状态类别,并度量其与真实健康状态类别的差异;全局域判别器用于对齐源域数据和目标域数据的域不变特征之间的边缘分布;局部域判别器用于分别对齐每一类健康状态下的源域数据和目标域数据的域不变特征之间的条件分布;
[0087]
在模型的应用过程中:特征提取器用于提取待诊断轴承数据的与轴承健康状态类别相关的域不变特征;标签分类器用于将待诊断轴承数据的域不变特征映射为对应的健康状态类别。
[0088]
本实施例中,轴承的健康状态包括:正常状态和故障状态;其中,故障状态包括外圈故障、内圈故障、滚动体故障和保持架故障。daan网络主要由一个深度的特征提取器(本实施例中为resnet网络),一个标签分类器,一个全局域判别器,和5个局部域判别器组成,其中,五个局部域判别器分别处理正常状态、外圈故障、内圈故障、滚动体故障和保持架故障,5类状态下的数据。
[0089]
本实施例中,daan网络的训练过程如下:
[0090]
1、使用一维resnet网络提取出域不变特征,将故障数据已知的尺寸的轴承的加速度数据通过特征提取器,得到深度特征向量;具体地,本发明通过一维resnet网络对振动加速度的时频域特征进行特征提取,得到对分类识别最有效的故障轴承的驱动端加速度特征。
[0091]
2、使用标签分类器从源域区分输入样本的标签,构建交叉熵损失,判断原轴承的正常数据和故障数据;
[0092]
3、使用全局域判别器对齐源域和目标域之间的边缘分布,从整体上对跨尺寸轴承的正异常数据分布进行对齐;
[0093]
4、使用局部域判别器对齐源域和目标域之间的条件分布,对跨尺寸轴承正异常数据分布的多模式结构进行对齐,从而可以进行更细粒度的域适应。
[0094]
具体地,标签分类器区分原轴承的正异常样本数据,采用softmax激活函数对源域
数据(a轴承样本数据)进行分类,并通过构建如下交叉熵损失实现:
[0095][0096]
其中,ns为训练数据集中源域数据的数量,ds为训练数据集中源域数据所构成的集合,c表示轴承健康状态类别的数量,表示第i个输入样本xi属于第c个健康状态类别的概率,gy表示标签分类器,gf表示特征提取器。
[0097]
需要说明的是,所选用的resnet网络能够尽可能地解决网络层数增加产生的梯度消失、爆炸和网络退化问题。所用softmax激活函数,能够将轴承数据分为正常状态、外圈故障、内圈故障和滚动体故障四类。所用交叉熵损失函数,可以有效提高模型的收敛速度。
[0098]
进一步地,为了混淆a、b两不同尺寸的轴承的健康状态数据域,实现域分类误差的最大化,本发明使用全局域判别器对齐源域和目标域(a、b两轴承健康状态数据域)之间的边缘分布,构建损失函数如下:
[0099][0100]
其中,n
t
为训练数据集中目标域数据的数量,d
t
为训练数据集中目标域数据所构成的集合,ld表示全局域判别器的交叉熵损失,gf是特征提取器,di是输入数据的域标签,用于预测表征输入数据属于源域还是目标域。
[0101]
进一步地,使用局部域判别器对齐源域和目标域之间的条件分布,即使用局部域判别器对齐a、b两轴承每一类故障对应的条件分布,构建损失函数如下:
[0102][0103]
其中,和是与第c个健康状态类别相关的局部域判别器和相应的交叉熵损失,是输入数据xi的第c个健康状态类别上的条件概率分布,di是输入数据xi的域标签。本实施例中,c=1,2,3,4,5分别对应轴承正常运行、外圈故障、内圈故障、滚动体故障和保持架故障。
[0104]
为了降低域分类精度,上述全局域判别器和局部域判别器中,均加入了梯度反转层grl,以缩小a、b两尺寸轴承数据的故障差异,达到对齐边缘分布和条件分布的目的。
[0105]
综合以上步骤,关于跨尺寸的轴承故障样本生成的总损失值如下:
[0106][0107]
其中,θf、θy、θd和分别为特征提取器、标签分类器、全局域判别器和第c个健康状态类别所对应的局部域判别器中的参数;λ为一个权衡参数。w为动态对抗因子,反映边缘分布和条件分布的相对重要程度,可以通过网络自行计算得到。优选地,在训练过程中,本实施例采用随机梯度下降法对上述参数进行优化。
[0108]
需要说明的是,上述动态对抗因子w可以估计为:
[0109][0110]
其中,定义全局域判别器和局部域判别器的域间距离如下:
[0111]da,g
(ds,d
t
)=2(1-2(lg))
[0112][0113]
其中,和表示来自类别c的源域数据样本和目标域数据样本,是第c个健康状态类别所对应的局部域判别器的交叉熵损失。
[0114]
本实施例优选深度对抗的方式学习和更新w,而不使用浅层特征,使得daan更加稳健和准确。额外的,本发明选用的daan神经网络,可以直接利用域判别器的损失对w进行自动微调,更加简单有效。
[0115]
需要说明的是,上述过程为本发明选取某一特定转速下的训练样本训练该转速下的跨尺寸电机轴承故障诊断模型的过程。为了获得不同转速下的轴承b轴承状态样本分布,可采用轴承a不同转速[n1,n2,n3,...,nn]对应的加速度数据训练多个跨尺寸电机轴承故障诊断模型[m1,m2,m3,...,mn],训练过程同上,这里不做赘述。
[0116]
实施例2、
[0117]
一种跨尺寸电机轴承故障诊断方法,包括:将待诊断的轴承数据输入到采用本发明实施例1所提供的跨尺寸电机轴承故障诊断模型的构建方法所构建的跨尺寸电机轴承故障诊断模型中的daan网络中,从而得到待诊断的轴承数据的健康状态。
[0118]
本实施例中,首先利用监测设备检测加速度信号并对信号进行截取,角域重采样,得到故障轴承数据的角域数据,其次对所得数据进行时频域特征提取,得到最有效的加速度特征,然后训练跨尺寸电机轴承故障诊断模型,最后通过该模型实现故障数据的迁移。
[0119]
下面对本发明实施例进行详细的说明:
[0120]
1)数据获取及预处理:
[0121]
本发明使用监测设备获取轴承转速、一维加速度信号等数据,由于获取到的信号受复杂工况的影响,含有大量噪声,属于非平稳的过程信号,本实施例对所采集到的数据进行滑动时间窗截取、小波降噪、角域重采样等方式进行预处理。
[0122]
其中,滑动时间窗截取过程为:通过单位长度为2048的“窗口”来框住已知时间序列,对振动信号段进行截取,计算框内的均值等统计指标,获取单位时间窗滑块内的数据,来缩小数据范围,比如对于输入信号x={x1,x2,...,xn}而言,xi为第i个输入信号的值,n是输入信号的长度,通过滑动单位长度为2048的“窗口”进行框取,每2048个窗口归为一类,计算其中的均值,获得不同尺度的信号表示y={y1,y2,...,yn},其中每一个y代表每一个窗口内的均值,一定程度上滤除了高频扰动和随机噪声。
[0123]
小波降噪过程为:根据信号和噪音在不同尺度下进行小波分解时,噪声的模和信号的模的极大值随小波尺度变化相反,对原始振动信号进行n层小波分解,将原始振动信号分为多个小频带{x1,x2,...,xn},然后对第1到第n层的每一层高频系数,使用软阈值量化方法进行处理,对低频系数不进行处理,最后根据小波分解的第n层的低频系数和经过处理后的第1层到第n层的高频系数进行信号重构,得到原始振动信号的估计值,实现信号降噪的
目的。
[0124]
角域重采样过程为:引入振动信号相邻两个采集点(tn,gn)和(t
n 1
,g
n 1
)和转速信号采集点(tm,gm),通过认为振动信号采样点n和n 1间的信号是线性的,得到关系进而得到振动加速度信号序列{t0,t1,t2...t
m-2
,t
m-1
,tm},此时得到的序列具有平稳特性,同时也具备了时间域采样的实际物理意义,更易于进行后续步骤对时域和频域特征的提取。
[0125]
2)基于本发明实施例1训练好的跨尺寸电机轴承故障诊断模型对经过预处理后的轴承故障数据进行处理,得到其健康状态。
[0126]
相关技术方案同实施例1,这里不做赘述。
[0127]
实施例3、
[0128]
一种跨尺寸电机轴承故障诊断方法,包括:存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时执行本发明实施例2所提供的跨尺寸电机轴承故障诊断方法。
[0129]
相关技术方案同实施例2,这里不做赘述。
[0130]
实施例4、
[0131]
一种机器可读存储介质,所述机器可读存储介质存储有机器可执行指令,所述机器可执行指令在被处理器调用和执行时,所述机器可执行指令促使所述处理器实现本发明实施例1所提供的跨尺寸电机轴承故障诊断模型的构建方法和/或本发明实施例2所提供的跨尺寸电机轴承故障诊断方法。
[0132]
相关技术方案同实施例1和实施例2,这里不做赘述。
[0133]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。