1.本文讨论的本案(case)涉及优化装置、优化方法及存储优化程序的 非暂态计算机可读存储介质。
背景技术:
2.近年来,计算机辅助工程(cae)分析已经应用于各种产品(装置、 装备等)的设计。cae分析是通过执行将各种条件施加于使用计算机辅 助设计(cad)等在计算机上建模的产品的数值计算实现虚拟实验的模 拟技术的总称。
3.通过执行cae分析,可以在不实际制造产品的情况下优化产品的形 状等,并且可以有效地设计产品。
4.使用cae分析来优化产品的形状的现有技术的示例包括被称为参数 优化的技术,在参数优化中,例如,设计产品的人设置可以唯一确定产 品的形状的参数(设计变量)并且将这些参数用于优化。在作为现有技 术的示例的参数优化中,由于设置参数(圆的半径、多边形每条边的长 度等)的性质,产品的形状可能会受到限制并且可能无法进行充分的优 化。此外,在作为现有技术的示例的参数优化中,针对设置参数的每个 设置值执行cae分析,并且因此需要执行大量的cae分析,并且存在 计算成本高的问题。
5.此外,在不使用可以唯一确定产品的形状的上述参数(设计变量) 的情况下执行优化的技术的示例包括例如被称为拓扑优化的技术。在拓 扑优化中,产品的形状不受参数(设计变量)性质的限制,因此与参数 优化相比,可以以较高的自由度来优化产品的形状。
6.此处,可以根据表示产品的形状的技术对拓扑优化进行分类,例如 可以将拓扑优化分类为连续拓扑优化和离散拓扑优化。
7.连续拓扑优化(密度法或水平集法)是通过用连续值表示产品的形 状等并执行差分搜索来优化产品的形状的技术。
8.对于连续拓扑优化,已经提出了如下技术:重复地将对象的设计区 域按元素划分、通过有限元方法得出场的形状的物理量、得出目标函数 及其灵敏度以及求解反应扩散方程直至目标函数收敛。
9.在这样的连续拓扑优化中,搜索到的产品的形状可能被限于局部解, 并且存在可搜索形状的范围窄的问题。此外,作为现有技术的示例的连 续拓扑优化,需要在优化过程中进行大量cae分析,并且存在计算成本 高的问题。
10.离散拓扑优化(开-关法(on-off法))是通过将产品的形状表示为 离散值(例如,“1”或“0”)并且针对这些离散值的所有组合搜索是否 在产品的划分区域中布置材料来优化产品的形状的技术。作为现有技术 的示例的离散拓扑优化的可搜索形状的范围比连续拓扑优化宽,但是由 于针对大量离散值的每个组合执行cae分析,因此需要进行大量cae 分析,并且存在计算成本非常高的问题。
11.如以上所描述的,在现有技术中,在使用cae分析优化和设计产品 (要设计的对象,例如装置或装备)的形状时,可搜索的形状受到限制, 并且该形状可能不能被充分优
化。此外,在现有技术中,由于需要重复 进行大量的cae分析,因此计算成本变高,并且在现实时间内对产品的 形状进行优化有时很困难。
12.相关技术的示例包括日本公开特许公报第2010-108451号。
技术实现要素:
13.技术问题
14.在一方面,本案的目的在于提供能够在短时间内且充分地优化对象 的形状的优化装置等。
15.问题的解决方案
16.根据实施方式的一方面,提供了一种优化对象的形状的优化装置。 在示例中,优化装置包括:存储器;以及耦接至该存储器的处理器,该 处理器被配置成执行优化处理,该优化处理包括:基于多个元素中的每 个元素对对象的预定特性的贡献获得目标函数方程,所述多个元素中的 每个元素是通过对布置在设计区域中的对象进行划分而获得的元素;以 及通过基于所获得的目标函数方程针对对象的每个元素确定是否布置对 象的每个元素来优化对象的形状。
17.本发明的目的和优点将借助于在权利要求书中特别指出的元素和组 合来实现和获得。
18.应当理解,前面的概括描述和下面的详细描述均是示例性的和说明 性的并且不限制本发明。
19.发明的有益效果
20.在一方面,本案可以提供一种能够在短时间内且充分优化对象的形 状的优化装置等。
附图说明
21.图1a是示出在参数优化中将三角形的每条边的长度指定为参数的 情况下每条边的长度的示例的图;
22.图1b是示出在参数优化中将三角形的每条边的长度指定为参数的 情况下每条边的长度的另一示例的图;
23.图2是示出在离散拓扑优化中表示对象的形状的位图的示例的图;
24.图3是示出在搜索对二次无约束二进制优化(qubo)格式的伊辛 模型方程给出最小值的位的组合时的状态的示例的图;
25.图4是示出本案中公开的优化装置的硬件配置的示例的图;
26.图5是示出本案中公开的优化装置的硬件配置的另一示例的图;
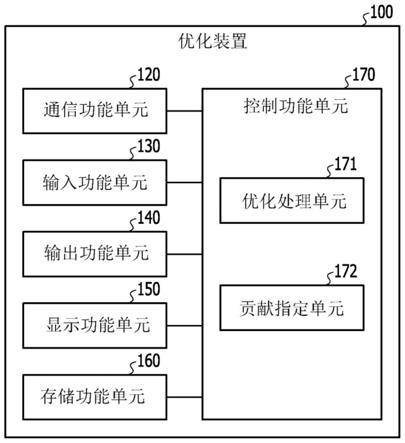
27.图6是示出本案中公开的优化装置的功能配置的示例的图;
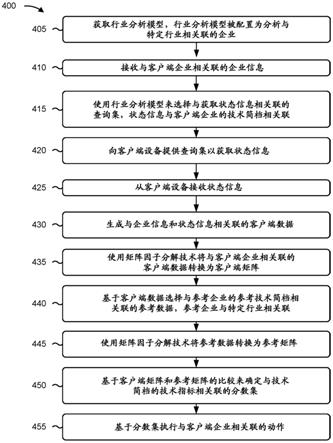
28.图7是示出使用本案中公开的技术的示例优化对象的形状时的流程 的示例的流程图;
29.图8是示出用于退火方法的退火机的功能配置的示例的图;
30.图9是示出转变控制单元的操作流程的示例的图;
31.图10是示出在示例1中优化磁屏蔽件的形状时计算模型的示例的图;
32.图11是示出在示例1中设置的形成磁屏蔽件的磁性材料的bh曲线 (磁滞曲线)的示例的图;
33.图12a是用于描述在通过对示例1中的计算模型进行划分并利用有 限元方法执行分析来获得每个元素中的磁通密度时的流程的示例的图;
34.图12b是用于描述在通过对示例1中的计算模型进行划分并利用有 限元方法执行分析来获得每个元素中的磁通密度时的流程的示例的图;
35.图12c是用于描述在通过对示例1中的计算模型进行划分并利用有 限元方法执行分析来获得每个元素中的磁通密度时的流程的示例的图;
36.图13是示出示例1中在作为磁屏蔽件的材料的磁性材料布置在整个 设计区域的情况下设计区域中的磁通密度分布的示例的图;
37.图14是示出示例1中在作为磁屏蔽件的材料的磁性材料布置在整个 设计区域的情况下通过划分设计区域中的磁屏蔽件而获得的每个元素的 示例的图;
38.图15是示出在设置将作为磁屏蔽件的材料的磁性材料布置在整个设 计区域的条件时磁屏蔽件的形状的示例作为示例1中优化时的初始形状 的图;
39.图16a是示出在示例1的第一次优化中进行滤波之前磁屏蔽件的形 状的示例的图;
40.图16b是示出在示例1的第一次优化中进行滤波之后磁屏蔽件的形 状的示例的图;
41.图17a是示出在示例1的第二次优化中进行滤波之前磁屏蔽件的形 状的示例的图;
42.图17b是示出在示例1的第二次优化中进行滤波之后磁屏蔽件的形 状的示例的图;
43.图18a是示出在示例1的第三次优化中进行滤波之前磁屏蔽件的形 状的示例的图;
44.图18b是示出在示例1的第三次优化中进行滤波之后磁屏蔽件的形 状的示例的图;
45.图19a是示出在示例1的第四次优化中进行滤波之前磁屏蔽件的形 状的示例的图;
46.图19b是示出在示例1的第四次优化中进行滤波之后磁屏蔽件的形 状的示例的图;
47.图20a是示出在示例1的第五次优化中进行滤波之前磁屏蔽件的形 状的示例的图;
48.图20b是示出在示例1的第五次优化中进行滤波之后磁屏蔽件的形 状的示例的图;
49.图21a是示出在示例1的第六次优化中进行滤波之前磁屏蔽件的形 状的示例的图;
50.图21b是示出在示例1的第六次优化中进行滤波之后磁屏蔽件的形 状的示例的图;
51.图22a是示出在示例1的第七次优化中进行滤波之前磁屏蔽件的形 状的示例的
图;
52.图22b是示出在示例1的第七次优化中进行滤波之后磁屏蔽件的形 状的示例的图;
53.图23a是示出在示例1的第八次优化中进行滤波之前磁屏蔽件的形 状的示例的图;
54.图23b是示出在示例1的第八次优化中进行滤波之后磁屏蔽件的形 状的示例的图;
55.图24a是示出在示例1的第九次优化中进行滤波之前磁屏蔽件的形 状的示例的图;
56.图24b是示出在示例1的第九次优化中进行滤波之后磁屏蔽件的形 状的示例的图;
57.图25a是示出在示例1的第十次优化中进行滤波之前磁屏蔽件的形 状的示例的图;
58.图25b是示出在示例1的第十次优化中进行滤波之后磁屏蔽件的形 状的示例的图;
59.图26a是示出在示例1的第十一次优化中进行滤波之前磁屏蔽件的 形状的示例的图;
60.图26b是示出在示例1的第十一次优化中进行滤波之后磁屏蔽件的 形状的示例的图;
61.图27a是示出在示例1的第十二次优化中进行滤波之前磁屏蔽件的 形状的示例的图;
62.图27b是示出在示例1的第十二次优化中进行滤波之后磁屏蔽件的 形状的示例的图;
63.图28a是示出在示例1的第十三次优化中进行滤波之前磁屏蔽件的 形状的示例的图;
64.图28b是示出在示例1的第十三次优化中进行滤波之后磁屏蔽件的 形状的示例的图;
65.图29a是示出在示例1的第十四次优化中进行滤波之前磁屏蔽件的 形状的示例的图;
66.图29b是示出在示例1的第十四次优化中进行滤波之后磁屏蔽件的 形状的示例的图;
67.图30a是示出在示例1中在设置将作为磁屏蔽件的材料的磁性材料 布置在整个设计区域的条件时磁屏蔽件的形状的示例的图;
68.图30b是示出在示例1中在设置将作为磁屏蔽件的材料的磁性材料 布置在整个设计区域的条件时在磁屏蔽件的形状中由线圈产生的磁力的 磁力线的示例的图;
69.图31a是示出在示例1中α=0.95且β=0.05的情况下磁屏蔽件的 形状的优化结果的示例的图;
70.图31b是示出在示例1中α=0.95且β=0.05的情况下在磁屏蔽件 的优化结果的形状中由线圈产生的磁力的磁力线的示例的图;
71.图32a是示出在示例2中α=0.5且β=0.5的情况下磁屏蔽件的形 状的优化结果的示例的图;
72.图32b是示出在示例2中α=0.5且β=0.5的情况下在磁屏蔽件的 优化结果的形状中由线圈产生的磁力的磁力线的示例的图;
73.图33a是示出在示例3中α=0.7且β=0.3的情况下磁屏蔽件的形 状的优化结果的示例的图;
74.图33b是示出在示例3中α=0.7且β=0.3的情况下在磁屏蔽件的 优化结果的形状中由线圈产生的磁力的磁力线的示例的图;
75.图34a是示出在示例4中α=0.8且β=0.2的情况下磁屏蔽件的形 状的优化结果的示例的图;
76.图34b是示出在示例4中α=0.8且β=0.2的情况下在磁屏蔽件的 优化结果的形状中由线圈产生的磁力的磁力线的示例的图;
77.图35a是示出在示例5中α=0.99且β=0.01的情况下磁屏蔽件的 形状的优化结果的示例的图;
78.图35b是示出在示例5中α=0.99且β=0.01的情况下在磁屏蔽件 的优化结果的形状中由线圈产生的磁力的磁力线的示例的图;
79.图36是示出示例1至示例5中对象区域中的磁通密度的均方与磁性 材料的面积(磁性材料面积)的关系的示例的图;以及
80.图37是示出在本案中公开的技术的一个实施方式中的处理流程的示 例的图。
具体实施方式
81.(优化装置)
82.本案中公开的技术基于本发明人的下述发现,即现有技术不能在短 时间内且充分地优化对象的形状。因此,在描述本案中公开的技术的细 节之前,将具体描述现有技术的问题等。
83.首先,如以上所描述的,在参数优化中,例如,在优化对象(装置、 装备等)的形状时,设计该对象的人对唯一确定该对象的形状的参数(设 计变量)进行设置并且基于这些参数执行优化。参数优化中要设置的参 数的示例包括例如圆的半径、多边形的每条边的长度、各边之间的角度 等。
84.此处,在参数优化中,当通过该参数表示对象的形状时,在指定圆 的半径作为参数的情况下,要优化的对象的形状被限制为圆。类似地, 在参数优化中,在指定三角形的每条边的长度作为参数的情况下,要优 化的对象的形状被限制为三角形。
85.更具体地,在指定三角形的每条边的长度作为参数优化中的参数的 情况下,考虑在优化之前三角形各边的长度为图1a中示出的a1、a2和a3的情况。在这种情况下,假设参数优化的结果如图1b所示三角形各边的 长度为a1、a2和a3。
86.在图1a和图1b中示出的示例中,可以通过执行参数优化对三角形 各边的长度a1、a2和a3进行优化,但是对象的形状被限制为三角形,并 且不可能搜索除三角形外的形状的情况。以这种方式,在参数优化中, 由于设置参数的性质,对象的形状受到限制,并且可能无法执行充分优 化。
87.此外,在使用参数优化来优化对象的形状时,在每次参数的值发生 变化时都需要利用设置参数的值进行cae分析(例如,对对象的性能进 行分析等)。因此,在使用参数优化来优化对象的形状的情况下,针对设 置参数的每个设置值执行cae分析,并且因此需要执行大量的cae分 析且存在计算成本高的问题。
88.此外,如以上所描述的,在连续拓扑优化(密度法或水平集法)中, 由使用连续值等的函数表示对象的形状,并且在不使用唯一确定对象的 形状的参数(设计变量)的情况下通过执行差分搜索来优化对象的形状。 以这种方式,由于连续拓扑优化是使用差分搜索的优化技术,因此优化 结果取决于初始设置值(使用连续值的函数的初始值)。因此,在连续拓 扑优化中,通过执行优化搜索的对象的形状可能会被限于(陷入)局部 解,并且存在可搜索形状的范围窄的问题。
89.在通过连续拓扑优化来优化对象的形状时,针对优化过程中获得的 每个形状执行cae分析,因此需要进行大量的cae分析,并且存在计 算成本高的问题。
90.另外,如以上所描述的,在离散拓扑优化(开-关法(on-off法)) 中,由离散值表示对象的形状,并且针对这些离散值的所有组合搜索是 否在该对象的每个划分区域中布置材料。在离散拓扑优化中用离散值表 示对象的形状时,例如,使用“1(布置)”或“0(不布置)”表示是否 在对象的每个划分区域中布置材料。
91.更具体地,在离散拓扑优化中,“xi=1”是材料(物质)被布置在 第i区域中的情况(on),并且“xi=0”是材料没有被布置在第i区域中 的情况(off)。在这种情况下,在离散拓扑优化中,如图2所示,可以 由位“1”和位“0”的图(位图)表示对象的形状。
92.以这种方式,在离散拓扑优化中,由离散值的组合表示对象的形状, 并且针对这些离散值的所有组合搜索形状(求解组合优化问题),使得可 以在比连续拓扑优化宽的范围内搜索形状。
93.然而,在离散拓扑优化中,在针对表示对象的形状的离散值的所有 组合搜索形状时,需要例如针对大量离散值的每种组合(例如,针对对 象可能呈现的每种形状)执行cae分析。因此,在离散拓扑优化中,需 要针对大量离散值的各种组合执行大量的cae分析,并且存在计算成本 非常高的问题。
94.如以上所描述的,在现有技术中,在优化对象的形状时,对象的形 状的搜索范围受到限制并且搜索变得不充分,或者由于计算成本高而导 致优化花费时间,并且在现实时间内优化对象的形状有时很困难。
95.因此,本发明人对能够在短时间内且充分优化对象的形状的装置等 进行了认真研究并且已经获得了以下发现。
96.也就是说,本发明人发现,通过以下的优化装置等可以在短时间内 且充分地优化对象的形状。
97.作为本案中公开的技术的示例的优化装置是对对象的形状进行优化 的优化装置,该优化装置包括:
98.优化处理单元,其被配置成如下指定对象的形状:
99.使用基于多个元素中的每个元素对对象的预定特性的贡献的目标函 数方程,所述多个元素中的每个元素是通过对要布置在设计区域中的对 象进行划分获得的;以及
100.针对对象的每个元素指定是否布置对象的每个元素。
101.此处,在本案中公开的技术的示例中,通过使用基于多个元素中的 每个元素对对象的预定特性的贡献的目标函数方程指定对象的形状来优 化对象的形状,所述多个元素中的每个元素是通过对布置(要布置)在 设计区域中的对象进行划分而获得的。
102.在本案中公开的技术的示例中,针对要针对其优化形状的对象,通 过将对象布置在设计区域中并对对象进行划分来将对象划分成多个元素。 换句话说,在本案中公开的技术的示例中,通过将设计区域划分成多个 元素来获得作为要布置在设计区域中的划分对象的多个元素,所述设计 区域是其中能够布置对象的区域。也就是说,在本案中公开的技术的示 例中,对象的设计区域被划分成多个元素,并且多个元素作为集合表示 对象的设计区域。
103.然后,在本案中公开的技术的示例中,通过使用基于通过对对象进 行划分而获得的多个元素中的每个元素对对象的预定特性的贡献的目标 函数方程指定对象的形状来优化对象的形状。换句话说,在本案中公开 的技术的示例中,针对通过对对象进行划分而获得的元素,构建基于各 个元素对对象的预定特性的贡献的目标函数方程,并且基于所构建的目 标函数方程指定和优化对象的形状。
104.对象的预定特性可以是例如与对象的性能相关的特性。作为与对象 的性能相关的特性,例如,可以根据对象的用途等适当地选择性能取决 于对象的形状而变化的特性。
105.更具体地,在对象是磁屏蔽件的情况下,如下面将在示例等中描述 的,对象的预定特性可以是例如关于磁屏蔽件中希望磁力被屏蔽的区域 (对象区域)的磁通量的屏蔽性能。在该示例中,例如,为了优化磁屏 蔽件的形状(为了确定其中布置有磁屏蔽件的材料(磁性材料)的元素), 使用能够考虑关于希望磁力被屏蔽的区域的磁通量的屏蔽性能(预定特 性的示例)和其他条件的目标函数方程。
106.注意,目标函数方程(目标函数)可以是例如在组合优化问题中目 标函数方程中的变量处于最佳组合时取最小值的函数。因此,通过搜索 使目标函数方程最小化的变量的组合(使目标函数方程最小化),可以搜 索到组合优化问题的解并且可以对对象的形状进行优化。
107.此外,在本案中公开的技术的示例中,对对象的预定特性的贡献可 以是例如表示对如上所述的预定特性的影响的程度(影响程度)的物理 量。也就是说,在本案中公开的技术的示例中,例如,可以将对象中影 响对象的性能的物理量用作贡献。
108.更具体地,在对象为磁屏蔽件并且预定特性为磁通量的屏蔽性能的 情况下,对对象的预定特性的贡献可以是磁屏蔽件中每个元素的磁化矢 量。在该示例中,例如,可以通过使用基于通过对磁屏蔽件进行划分而 获得的每个元素中的磁化矢量的目标函数方程对磁屏蔽件的形状进行优 化来指定具有优化的磁通量屏蔽性能的形状。
109.此外,在本案中公开的技术的示例中,例如,可以通过将除如上所 述的贡献外的另外的条件添加至目标函数方程以考虑另外的条件(约束) 来优化对象的形状。
110.然后,在本案中公开的技术的示例中,通过针对对象的每个元素, 使用基于如上所述的贡献的目标函数方程指定是否布置对象的每个元素 来优化对象的形状。换句话说,在本案中公开的技术的示例中,可以通 过基于对对象的预定特性的贡献指定是否针对设计区域布置对象的每个 元素来通过指定对象的形状以改善预定特性来执行优化。
111.此处,在本案中公开的技术的示例中,由于是否布置对象的每个元 素是基于目标
函数方程指定的,因此可以在考虑可以在设计区域中布置 每个元素的所有组合的情况下在宽范围内搜索对象的形状。也就是说, 在本案中公开的技术的示例中,由于可以离散地表示对象的每个元素的 布置并且可以对形状进行搜索,因此可以在宽范围内充分搜索对象的形 状而不受表示形状的参数的性质或函数的初始值的影响。
112.此外,在本案中公开的技术的示例中,如以上所描述的,由于使用 基于对对象的预定特性的贡献的目标函数方程来优化对象的形状,因此, 能够考虑到所述贡献而有效地优化对象的形状,从而改善预定特性。也 就是说,在本案中公开的技术的示例中,例如,可以在例如考虑作为表 示对对象的预定特性(对象的性能)的影响程度的物理量的贡献的情况 下确定对象的形状的优化方向(优化指南)以改善预定特性。
113.此外,在本案中公开的技术的示例中,可以使用预先指定的贡献或 者可以使用新指定的贡献作为在目标函数方程中使用的贡献。在使用新 指定的贡献的情况下,指定贡献的技术的示例包括通过执行能够获得对 象中影响对象的性能的物理量的cae分析来指定贡献的技术。
114.在本案中公开的技术的示例中,如以上所描述的,由于可以确定对 象的形状的优化方向以改善预定特性,因此即使在指定贡献时执行cae 分析的情况下,也可以减少用于指定贡献的cae分析的数量。换句话说, 在本案中公开的技术的示例中,例如,由于可以基于贡献有效地搜索形 状以改善预定特性,因此即使在通过cae分析来更新贡献的情况下,也 可以抑制执行cae分析的次数。
115.如以上所描述的,在本案中公开的技术的示例中,即使在通过执行 cae分析等来获得对对象的预定特性的贡献的情况下,也可以减少在优 化对象的形状时所需的cae分析的次数并且可以在短时间内执行优化。
116.如以上所描述的,在本案中公开的技术的示例中,例如,在优化对 象(装置、装备等)的形状时,使用基于对对象的预定特性的贡献的目 标函数方程来指定是否布置通过对对象进行划分而获得的多个元素中的 每个元素。因此,在本案公开的技术中,可以在短时间内且充分地优化 对象的形状。
117.在以下描述中,将参照附图描述在本案中公开的技术的示例。注意, 例如,在作为本案中公开的技术的示例的优化装置中的处理(操作)例 如优化对象的形状可以由包括优化装置中的优化处理单元来执行。
118.此处,本案中公开的优化装置有利地具有贡献指定单元,并且如果 需要还可以具有另外的单元(装置)。注意,例如,优化处理单元可以由 诸如中央处理单元(cpu)的处理器和诸如随机存取存储器(ram)的 存储器的组合实现,或者作为退火机的一部分实现。
119.首先,作为在本案中公开的技术的示例的优化装置可以是对对象的 形状进行优化的优化装置。
120.此处,要使用在本案中公开的技术的示例优化其形状的对象不受特 别限制,只要预定特性根据形状变化并且可以指定对预定特性的贡献即 可,并且可以根据用途进行适当选择。例如,可以适当地选择和应用具 有可以通过已知的拓扑优化来优化的形状的对象作为所述对象。
121.例如,对象的具体示例包括要在以下示例中描述的磁屏蔽件、机械 零件、绝热材料、光屏蔽构件、隔音材料、振动阻尼材料、防波材料(waveproofing material)等。
122.此外,在本案中公开的技术的示例中,要优化的对象的形状可以是 二维形状或三维形状。在本案中公开的技术的示例中,例如,优化(搜 索)对象的二维形状是有利的,因为可以在较短时间内对形状进行优化。 此外,在优化对象的二维形状时,可以在通过对要布置在设计区域中的 对象进行划分而获得的每个元素密集(thicken)的条件下执行优化。
123.《优化处理单元》
124.如以上所描述的,作为在本案中公开的技术的示例的优化装置具有 优化处理单元,该优化处理单元使用基于多个元素中的每个元素对该对 象的预定特性的贡献的目标函数方程指定对象的形状,所述多个元素中 的每个元素是通过对要布置在设计区域中的对象进行划分而获得的。此 外,优化处理单元通过针对对象的每个元素指定是否布置对象的每个元 素来优化对象的形状。
125.在本案中公开的技术的示例中,优化处理单元使用目标函数方程指 定和优化对象的形状。此处,目标函数方程可以是例如在组合优化问题 中基于组合优化问题中的条件或约束在目标函数方程中的变量处于最佳 组合时取最小值的函数。因此,通过搜索使目标函数方程最小化(最小 化目标函数方程)的变量的组合,可以搜索到组合优化问题的解并且可 以对对象的形状进行优化。注意,目标函数也可以被称为能量函数、成 本函数、哈密顿量等。
126.在本案中公开的技术的示例中,使用基于通过对要布置在设计区域 中的对象进行划分而获得的多个元素中的每个元素对对象的预定特性的 贡献的目标函数方程。
127.此外,“对要布置在设计区域中的对象进行划分”意指在设计具有优 化形状的对象时虚拟地划分其中可以布置对象的区域(设计区域)。
128.划分对象时的划分方法不受特别限制并且可以根据目的适当地选择。 作为划分对象时的划分方法,例如,有利的是将对象划分成使得每个元 素形成为适于通过下面要描述的数值计算(例如,有限元方法)进行分 析的形状。
129.例如,可以根据用于优化目标函数方程的计算机(例如,退火机器) 可以使用的位的数量、要求的计算精度、可以实际制造的对象尺寸等来 适当地选择划分对象时的划分数量(元素的数量)。
130.此处,可以使用预先指定的贡献或者可以使用新指定的贡献作为通 过对要布置在设计区域中的对象进行划分而获得的多个元素中的每个元 素对对象的预定特性的贡献。然而,有利的是使用新指定的贡献。
131.《贡献指定单元》
132.指定贡献的技术不受特别限制,只要可以针对对象的每个元素指定 对预定特性的贡献即可,并且可以根据目的适当地选择,但是有利的是, 通过下面要描述的贡献指定单元指定贡献。
133.贡献指定单元可以是用于通过针对要布置在设计区域中的对象执行 使用数值计算的分析来指定与预定特性相关的物理量的分布的单元(装 置)。也就是说,在本案中公开的技术的示例中,另外包括贡献指定单元 是有利的,该贡献指定单元如下指定对象中每个元素的贡献:通过针对 要布置在设计区域中的对象执行使用数值计算的分析来指定与预定特性 相关的物理量的分布。注意,贡献指定单元可以例如通过诸如cpu的处 理器和诸如ram的存储器的组合实现。
134.例如,可以使用上述cae分析作为贡献指定单元针对要布置在设计 区域中的对象执行的使用数值计算的分析。使用数值计算的分析(cae 分析)并不受特别限制,只要可以指定贡献即可,并且可以根据目的适 当地选择,但是有利的是使用有限元方法的分析。换句话说,在本案中 公开的技术的示例中,有利的是,贡献指定单元通过执行使用有限元方 法的分析来指定对象的每个元素的贡献。
135.在有限元方法(fem)中,例如,将要分析的区域划分成大量的被 称为元素(网格(mesh))的小区域,并且通过简单方程对在每个小区域 的节点和边处定义的势(potential)进行近似以创建联立线性方程,并且 通过求解该联立线性方程获得势分布等。因此,通过使用有限元方法, 可以求解难以用解析方法求解的微分方程,可以高精度地执行对各种对 象的模拟,并且可以更精确地指定贡献。
136.注意,可以使用已知的分析模拟软件来执行使用有限元方法的分析。
137.贡献指定单元通过执行使用数值计算的分析(例如,通过有限元方 法进行的分析)来指定与对象的预定特性相关的物理量的分布。
138.此处,与对象的预定特性相关的物理量(例如,与对象的性能相关 的特性)不受特别限制,只要该物理量对预定特性产生影响即可,并且 可以根据目的适当地选择。与对象的预定特性相关的物理量的示例包括 例如电磁场分析中的磁通密度分布、结构分析中的应力分布、热分析中 的温度分布、光学分析中的光强度分布、声音分析(声学分析)中的声 音大小分布、振动分析中的振动分布、流体波分析中的波分布等。注意, 在下文中,由贡献指定单元指定的物理量的分布可以被称为“场分布”。
139.另外,由指定物理量的分布的贡献指定单元指定的对象的每个元素 的贡献不受特别限制,只要该贡献是影响基于这些物理量的分布指定的 对象的预定特性的物理量即可,并且可以根据目的适当地选择。由贡献 指定单元指定的贡献的具体示例包括电磁场分析中的磁化矢量、结构分 析中的负载矢量、热分析中的发热值、光学分析中每个元素的光强度、 声音分析(声学分析)中每个元素的声音的大小、振动分析中每个元素 的振动幅度、流体波分析中每个元素的波动幅度等。
140.此外,在本案中公开的技术的示例中,有利的是,重复进行对对象 的形状的优化以及基于优化的结果更新贡献。通过这样做,可以使用基 于更合适的贡献的目标函数方程来优化对象的形状,并且可以获得对象 的更合适的形状。
141.更具体地,有利地是,贡献指定单元基于关于是否布置对象的每个 元素的具体结果来更新对象的每个元素的贡献,并且优化处理单元使用 基于所更新的贡献的目标函数方程指定对象的形状。如以上所描述的, 在本案中公开的技术的示例中,通过重复地执行贡献指定单元和优化处 理单元的处理,可以逐渐搜索到更合适的形状,并且最终可以指定对象 的更充分优化的形状。
142.在本案中公开的技术的示例中,在重复执行贡献指定单元和优化处 理单元的处理的情况下,重复所述处理的条件(重复次数)不受特别限 制并且可以根据目的适当地选择。在重复执行贡献指定单元和优化处理 单元的处理的情况下,重复所述处理的条件有利地是重复所述处理直至 例如用于优化的目标函数方程的最小值的变化变得等于或小于预定值。
143.换句话说,在本案中公开的技术的示例中,有利的是,重复地进行 在贡献指定单
元中更新贡献以及在优化处理单元中使用基于所更新的贡 献的目标函数方程进行优化直至目标函数方程的最小值的变化变得等于 或小于预定值。通过这样做,可以更充分地优化目标函数方程的贡献, 并且可以指定对象的更充分优化的形状。注意,可以通过例如与紧先前 的计算结果进行比较(在第(n 1)个计算结果与第n个计算结果之间进 行比较)来确定目标函数方程的最小值的变化等于或小于预定值。
144.此外,确定最大计算次数(循环次数)作为重复处理的条件,并且 可以将基于具有多次计算之中最低的最小值的目标函数方程指定的形状 指定为最终优化结果。
145.此处,在本案中公开的技术的示例中,优化处理单元通过使用目标 函数方程针对对象的每个元素指定是否布置对象的每个元素来指定对象 的形状。换句话说,在本案中公开的技术的示例中,由于通过基于目标 函数方程求解组合优化问题来指定是否布置对象的每个元素,因此可以 考虑到能够在设计区域中布置每个元素的所有组合在宽范围搜索对象的 形状。
146.此外,能够基于目标函数方程高速求解组合优化问题的技术的示例 包括通过例如退火方法(退火)执行计算的技术。
147.为了通过退火方法(退火)高速有效地最小化目标函数,存在需要 用二次无约束二进制优化(qubo)格式表示目标函数的情况。此处, qubo格式意指这样的格式,其中,关于可以仅为两个值(例如0或1) 的变量要被最大化或最小化的目标函数可以被表示到二阶项并且变量空 间的范围未被明确限制。
148.在退火方法中,例如,将以qubo格式表示的目标函数转换成被称 为伊辛模型的格式并且使被转换成伊辛模型的目标函数的值最小化以求 解组合优化问题。
149.例如,通过将qubo格式的目标函数转换成伊辛模型而获得的方程 (伊辛模型方程)可以是由下式表示的qubo格式的伊辛模型方程。
[0150][0151]
然而,在上述方程中,e(s)是意指最小化求解组合优化问题的目标函 数。
[0152]wij
是用于在第i个元素(位)与第j个元素(位)之间加权的系数(权 重)。
[0153]
si是表示第i个元素(位)为0或1的二进制变量,并且sj是表示第 j个元素(位)为0或1的二进制变量。
[0154]bi
是表示关于第i个元素(位)的偏差的数值。
[0155]
const.是常数。
[0156]
在退火方法中,例如,在对上述qubo格式的伊辛模型方程中的每 个位(元素)进行各种改变的情况下,可以在短时间内高效地搜索伊辛 模型方程的最小值。
[0157]
例如,如图3所示,通过搜索向上述qubo格式的伊辛模型方程赋 予最小值的位(s:0或1)的组合(搜索被圆包围的部分),可以指定能 够优化伊辛模型方程的位的状态。请注意,在图3中,纵轴表示通过伊 辛模型方程(e(s))计算的能量的值的大小,并且横轴表示位(s)的组 合。
[0158]
然后,在退火方法中,因为可以基于位的指定状态获得优化目标函 数的参数,所以可以在短时间内高效地优化目标函数。如果可以以这种 方式以qubo格式表示目标函数,
则可以将目标函数转换成qubo格式 的伊辛模型方程,并且可以通过退火方法在短时间内高效地优化(最小 化)伊辛模型方程中的能量值。
[0159]
以这种方式,在本案中公开的技术的示例中,作为优化基于对预定 特性的贡献的目标函数方程的技术,将目标函数方程转换成qubo格式 的伊辛模型方程并且使被转换成伊辛模型方程的目标函数方程的值最小 化的技术是有利的。
[0160]
另外,将目标函数方程转换成伊辛模型方程的处理的示例包括例如 利用使用自制程序的“for循环”对目标函数方程进行扩展和转换的技术、 使用可以处理数学表达式本身的程序对目标函数方程进行转换的技术等。
[0161]
例如,有利的是,使用由下式(2)表示的方程作为被转换成伊辛模 型方程的目标函数方程。换句话说,在本案中公开的技术的示例中,有 利的是,优选优化处理单元基于被转换成由下式(2)表示的伊辛模型方 程的目标函数方程指定(优化)对象的形状。
[0162][0163]
注意,在上述式(2)中,
[0164]
e是被转换成伊辛模型方程的目标函数方程,
[0165]wij
是表示第i位与第j位之间的交互的数值,
[0166]bi
是表示关于第i位的偏差的数值,
[0167]
xi是表示第i位为0或1的二进制变量,以及
[0168]
xj是表示第j位为0或1的二进制变量。
[0169]
此处,可以针对xi和xj的每个组合例如通过在目标函数方程被转换 成伊辛模型方程之前提取目标函数方程中的每个参数的数值等来获得上 述式(2)中的w
ij
,并且w
ij
通常是矩阵。
[0170]
上述式(2)中右侧的第一项是通过在没有遗漏或重复的情况下针对 可以从各个位的所有状态中选择的两个状态的所有组合对两个电路的状 态(状态)和权重值(权重)的乘积进行合并而获得的。
[0171]
此外,上述式(2)中右侧的第二项是通过对各个位的所有状态中的 每个状态的偏移值和状态的乘积进行合并而获得的。
[0172]
也就是说,通过在目标函数方程被转换成伊辛模型方程之前提取目 标函数方程的参数以及获得w
ij
和bi,可以将目标函数方程转换成由上述 式(2)表示的伊辛模型方程。
[0173]
此外,在本案中公开的技术的示例中,可以通过例如使用退火机等 执行退火方法(退火)在短时间内优化(最小化)如上所述被转换成伊 辛模型方程的目标函数方程。也就是说,在本案中公开的技术的示例中, 有利的是,优化处理单元通过利用退火方法使转换成伊辛模型方程的目 标函数方程最小化来指定(优化)对象的形状。
[0174]
用于优化目标函数方程的退火机的示例包括例如量子退火机、使用 半导体技术的半导体退火机、通过使用中央处理器(cpu)或图形处理 单元(gpu)等执行通过软件执行的模拟退火的机器。此外,例如,digitalannealer(注册商标)可以用作退火机。
[0175]
注意,下面将描述使用退火机的退火方法的细节。
[0176]
另外,在本案中公开的技术的示例中,有利的是,对使用基于贡献 的目标函数方
程优化的对象的形状进行滤波。有利的是,通过对对象的 经优化的形状进行滤波,将实际上难以制造的“散布形状(斑驳形状)
”ꢀ
修正为稍微连续的形状(去除小的散布部分等)。
[0177]
此处,关于使用基于贡献的目标函数方程优化的对象的形状,取决 于优化条件等,存在其中目标函数方程取最低值的形状变成其中对象的 材料(物质)散布在设计区域中的形状的一些情况。在这种情况下,散 布形状被认为是具有高预定特性和高计算性能的形状,但是可能难以实 际地制造该对象。因此,有利的是,通过对使用基于贡献的目标函数方 程优化的对象的形状进行滤波来将对象修正为具有连续形状。换句话说, 在本案中公开的技术的示例中,有利的是,优化处理单元将对象的指定 形状修正为连续形状。
[0178]
此外,在重复进行更新贡献和基于贡献优化形状的情况下,在每次 重复时执行到连续形状的修正是有利的。
[0179]
此处,将描述滤波(形状的修正)的具体示例。
[0180]
例如,在执行滤波时,在考虑设计区域中每个元素周围的元素的情 况下获得所述每个元素的平均密度,并且可以基于所获得的平均密度执 行滤波。
[0181]
在基于平均密度执行滤波的技术中,例如,使用以下利用距离(r) 的方程来指定存在于在针对第e个元素指定的半径(r
min
)内的元素。
[0182]
如果
[0183]
注意,在上述方程中,g表示元素的重心坐标。
[0184]
接下来,在基于平均密度执行滤波的技术中,通过使用以下两个方 程来指定通过距离进行加权的材料的平均密度(ρe的平均值)。
[0185][0186][0187]
然后,在基于平均密度执行滤波的技术中,通过使用下式根据平均 密度的大小更新第e个元素中的材料的分布(xe)来执行滤波。
[0188][0189]
注意,关于基于上述平均密度的滤波方法,可以使用almeida等人 在“a simple and effective inverse projection scheme for void distributioncontrol in topology optimization.”struct multidisc optim,39,359-371 2009
”ꢀ
中提出的方法。
[0190]
在下文中,将使用装置的配置示例、流程图等来更详细地描述在本 案中公开的技术的示例。
[0191]
图4示出了在本案中公开的优化装置的硬件配置示例。
[0192]
在优化装置100中,例如,控制单元101、主存储装置102、辅助存 储装置103、i/o接口104、通信接口105、输入装置106、输出装置107 以及显示装置108经由系统总线109彼此
连接。
[0193]
控制单元101执行算术运算(例如,四则算术运算、比较运算以及 关于退火方法的算术运算)、硬件和软件操作控制等。控制单元101可以 是例如中央处理单元(cpu)、用于退火方法的退火机的一部分或其组合。
[0194]
控制单元101例如通过执行在主存储装置102等中读取的程序(例 如,在本案中公开的优化程序等)来实现各种功能。
[0195]
由本案公开的优化装置中的优化处理单元和贡献指定单元执行的处 理可以例如由控制单元101执行。
[0196]
主存储装置102存储各种程序和执行各种程序所需的数据等。例如, 可以使用具有只读存储器(rom)和随机存取存储器(ram)中的至少 之一的装置作为主存储装置102。
[0197]
rom存储各种程序,例如,基本输入/输出系统(bios)等。此外, rom不受特别限制,并且可以根据目的适当地选择。例如,可以例示为 掩模rom、可编程rom(prom)等。
[0198]
例如,ram用作在控制单元101执行存储在rom、辅助存储装置 103等中的各种程序时扩展的工作范围。ram不受特别限制,并且可以 根据目的适当地选择。例如,可以例示为动态随机存取存储器(dram)、 静态随机存取存储器(sram)等。
[0199]
辅助存储装置103不受特别限制,只要该装置可以存储各种信息即 可,并且可以根据目的适当地选择。例如,可以例示为固态驱动器(ssd)、 硬盘驱动器(hdd)等。此外,辅助存储装置103可以是便携式存储装 置,例如cd驱动器、dvd驱动器或蓝光(注册商标)盘(bd)驱动器。
[0200]
此外,本案中公开的优化装置程序例如被存储在辅助存储装置103 中、被加载到主存储装置102的ram(主存储器)中并由控制单元101 执行。
[0201]
i/o接口104是用于连接各种外部装置的接口。i/o接口104可以向 以下装置输入数据或者从以下装置输出数据:所述装置例如为压缩盘 rom(cd-rom)、数字通用盘rom(dvd-rom)、磁光盘(mo盘)、 通用串行总线(usb)存储器(usb闪存驱动器)等。
[0202]
通信接口105不受特别限制,并且可以适当地使用已知的通信接口。 例如,可以例示为使用无线通信或有线通信等的通信装置。
[0203]
输入装置106不受特别限制,只要该装置可以接收关于优化装置100 的各种请求和信息的输入即可,可以适当地使用已知的装置。例如,可 以例示为键盘、鼠标、触摸面板、麦克风等。此外,在输入装置106是 触摸面板(触摸显示器)的情况下,输入装置106也可以用作显示装置108。
[0204]
输出装置107不受特别限制,并且可以适当地使用已知的装置。例 如,可以例示打印机等。
[0205]
显示装置108不受特别限制,并且可以适当地使用已知的装置。例 如,可以例示液晶显示器、有机el显示器等。
[0206]
图5示出了在本案中公开的优化装置的另一硬件配置示例。
[0207]
在图5所示的示例中,优化装置100被划分成执行指定贡献的处理、 定义目标函数方程的处理、将目标函数方程转换成伊辛模型方程的处理 等的计算机200以及对伊辛模型方程进行优化的退火机300。此外,在图 5所示的示例中,优化装置100中的计算机200和退火机300经由网络400 连接。
[0208]
在图5所示的示例中,例如,可以使用cpu等作为计算机200的控 制单元101a,并且可以使用专门用于退火方法(退火)的装置作为退火 机300的控制单元101b。
[0209]
在图5所示的示例中,例如,计算机200通过有限元方法执行分析 并且作为贡献指定单元的功能指定贡献、设置用于定义目标函数方程的 各种设置以定义目标函数方程以及将所定义的目标转换函数方程转换成 伊辛模型方程。然后,关于伊辛模型方程中的权重(w
ij
)和偏差(bi)的 值的信息经由网络400从计算机200传输至退火机300。
[0210]
接下来,退火机300基于所接收的关于权重(w
ij
)和偏差(bi)的值 的信息来优化(最小化)伊辛模型方程,并且获得伊辛模型方程的最小 值和给出该最小值的位的状态(状态)。然后,所获得的伊辛模型方程的 最小值和所获得的给出该最小值的位的状态(状态)经由网络400从退 火机300传输至计算机200。
[0211]
接下来,计算机200基于所接收的针对伊辛模型方程给出最小值的 位的状态(状态)来获得对象的优化形状等。
[0212]
图6示出了在本案中公开的优化装置的功能配置的示例。
[0213]
如图6所示,优化装置100包括通信功能单元120、输入功能单元130、 输出功能单元140、显示功能单元150、存储功能单元160以及控制功能 单元170。
[0214]
通信功能单元120例如向外部装置发送各种数据以及从外部装置接 收各种数据。例如,通信功能单元120可以从外部装置接收关于被转换 成伊辛模型方程的目标函数方程中的偏差和权重的数据。
[0215]
输入功能单元130例如接收针对优化装置100的各种指令。此外, 输入函数单元130可以例如接收关于被转换成伊辛模型方程的目标函数 方程中的偏差和权重的数据的输入。
[0216]
输出功能单元140打印并输出例如关于对象的优化形状的信息等。
[0217]
显示功能单元150在显示器上显示例如关于对象的优化形状的信息 等。
[0218]
存储功能单元160存储例如各种程序、关于对象的优化形状的信息 等。
[0219]
控制功能单元170具有优化处理单元171和贡献指定单元172。控制 功能单元170执行例如存储在存储功能单元160中的各种程序并控制整 个优化装置100的操作。
[0220]
优化处理单元171执行例如使用基于对对象的预定特性的贡献的目 标函数方程指定(优化)对象的形状的处理。
[0221]
贡献指定单元172执行例如通过针对要布置在设计区域中的对象执 行使用数值计算的分析来指定与预定特性相关的物理量的分布,从而执 行指定对象的每个元素的贡献的处理。
[0222]
此处,将参照图7描述在使用本案中公开的技术的示例优化对象的 形状时的流程的示例。
[0223]
首先,优化处理单元171将要布置在设计区域中的对象划分成多个 元素(s101)。换句话说,在s101中,优化处理单元171准备通过对要 布置在设计区域中的对象进行划分而获得的元素。
[0224]
接下来,优化处理单元171设置将划分对象中的元素布置在整个设 计区域中的条件(s102)。换句话说,在s102中,优化处理单元171针 对设计区域中的对象的每个元素将表示材料的分布的变量设置为满足对 象的材料被布置在所有元素中的条件(例如,将指示材
料的存在或缺失 的变量x全部设置为“1”)。
[0225]
接下来,优化处理单元171指定对象的预定特性以及对预定特性的 贡献的类型(s103)。换句话说,在s103中,例如,优化处理单元171 针对要针对其优化形状的对象将在优化对象时要考虑的性能指定为预定 特性并且将影响该性能的物理量指定为贡献。
[0226]
接下来,贡献确定单元172通过有限元方法执行使用数值计算的分 析并且指定与预定特性相关的物理量的分布(s104)。换句话说,在s104 中,贡献确定单元172通过针对设计区域中被划分成各元素的对象执行 有限元方法的数值计算(模拟)来针对每个元素指定与预定特性相关的 物理量。
[0227]
然后,贡献指定单元172指定设计区域中的对象的每个元素对对象 的预定特性的贡献(s105)。换句话说,在s105中,贡献指定单元172 基于在s104中指定的物理量的分布来指定对象的每个元素的贡献。
[0228]
接下来,优化处理单元171基于贡献构建目标函数方程(s106)。换 句话说,在s106中,优化处理单元171在s105中指定的贡献的基础上 定义基于对象的每个元素对对象的预定特性的贡献的目标函数方程。
[0229]
接下来,优化处理单元171将目标函数方程转换成由下式(2)表示 的伊辛模型方程(s107)。换句话说,在s107中,优化处理单元171通 过提取所定义的目标函数方程中的参数并获得下式(2)中的bi(偏差) 和w
ij
(权重)将目标函数方程转换成由下式(2)表示的伊辛模型方程。
[0230][0231]
注意,在上述式(2)中,
[0232]
e是被转换成伊辛模型方程的目标函数方程,
[0233]wij
是表示第i位与第j位之间的交互的数值,
[0234]bi
是表示关于第i位的偏差的数值,
[0235]
xi是表示第i位为0或1的二进制变量,以及
[0236]
xj是表示第j位为0或1的二进制变量。
[0237]
接下来,优化处理单元171通过使用退火机来使上述式(2)最小化 (s108)。换句话说,在s108中,优化处理单元171通过关于上述式(2) 使用退火方法执行基态搜索(优化计算)计算上述式(2)的最小值来指 定对目标函数方程给出最小值的位的状态。
[0238]
然后,优化处理单元171基于使上述式(2)最小化的结果指定对象 的形状(s109)。换句话说,在s109中,优化处理单元171基于对上述 式(2)给出最小值的位的状态(状态)来指定在目标函数方程变成最小 值时对象的形状。
[0239]
接下来,优化处理单元171对对象的指定形状进行滤波以将该形状 修正为连续形状(s110)。更具体地,在s110中,优化处理单元171执 行将在s109中指定的对象的形状修正为连续形状的处理。
[0240]
接下来,优化处理单元171确定目标函数方程的最小值的变化是否 等于或小于预定值,并且在确定该变化等于或小于预定值的情况下将处 理移动至s112,或者在确定该变化不等于或不小于预定值(确定等于或 大于预定值)的情况下将处理返回至s104(s111)。
更具体地,在s111 中,优化处理单元171确定例如第n次计算中目标函数方程的最小值与 第(n 1)次计算中目标函数方程的最小值之间的差(δe)是否小于预 设残差(ε)。然后,在确定δe小于ε(δe《ε)的情况下将处理移动至s112, 或者在确定δe等于或大于ε(δe≥ε)的情况下将处理返回至s104。
[0241]
然后,优化处理单元171输出对对象的形状的优化结果并终止处理 (s112)。换句话说,在s112中,优化处理单元171执行s110中的滤波, 输出在目标函数方程的最小值的变化等于或小于预定值时对象的形状作 为优化结果,并且终止处理。
[0242]
此外,在图7中,已经根据特定顺序描述了在本案中公开的技术的 示例中的处理的流程。然而,在本案公开的技术中,可以在技术上可行 的范围内适当地切换各个步骤的顺序。此外,在本案公开的技术中,可 以在技术上可行的范围内共同执行多个步骤。
[0243]
下面将描述退火方法和退火机的示例。
[0244]
退火方法是用于使用随机数值和量子位的叠加概率地求出解的方法。 下面以使要优化的评估函数的值最小化的问题为例进行描述。评估函数 的值被称为能量。此外,在评估函数的值被最大化的情况下,只需要改 变评估函数的符号。
[0245]
首先,从向每个变量分配一个离散值的初始状态开始处理。针对当 前状态(变量值的组合),选择接近当前状态的状态(例如,仅一个变量 改变的状态),并且考虑这两个状态之间的状态转变。计算与状态转变有 关的能量变化。根据该值,概率性地确定是采用状态转变以改变状态, 还是不采用状态转变以保持原始状态。在能量下降时的采用概率被选择 为大于能量上升时的采用概率的情况下,可以预期:将在能量平均下降 的方向上发生状态改变,并且随着时间的推移,将发生到更合适的状态 的状态转变。因此,存在最终可以获得最优解或给出接近最优值的能量 的近似解的可能性。
[0246]
如果在能量确定性地下降时采用状态转变并且在能量上升时不采用 状态转变,则能量变化在广义上相对于时间单调减小,但是当达到局部 解时不会发生进一步的变化。如以上所描述的,由于在离散优化问题中 存在非常大量的局部解,因此状态几乎肯定会陷入不太接近最优值的局 部解中。因此,在求解离散优化问题时,概率性地确定是否采用某一状 态是重要的。
[0247]
在退火方法中,已经证明,通过如下确定状态转变的采用(允许) 概率,状态在无限时间(迭代计数)的限制下达到最优解。
[0248]
在下文中,将逐步描述用于使用退火方法求出最优解的方法。
[0249]
(1)对于由于状态转变引起的能量变化(能量减少)值(-δe),状 态转变的允许概率p由以下函数f()中的任何一个函数确定。
[0250]
p(δe,t)=f(-δe/t)
ꢀꢀ
(式1-1)
[0251]fmetro
(x)=min(1,e
x
)(metropolis方法)
ꢀꢀ
(式1-2)
[0252][0253]
此处,标记t是被称为温度值的参数,并且例如可以如下变化。
[0254]
(2)如由下式所表示的,温度值t相对于迭代计数t对数地减小。
[0255][0256]
此处,t0是初始温度值,并且取决于问题期望t0是足够大的值。
[0257]
在使用由(1)中的方程表示的允许概率的情况下,如果在足够的迭 代之后达到稳态,则对于热力学中的热平衡状态,每个状态的占有概率 都遵循玻尔兹曼分布。
[0258]
然后,当温度从高温逐渐降低时,低能量状态的占有概率增加。因 此,认为在温度充分降低时获得低能量状态。由于该状态与当材料退火 时引起的状态变化非常相似,因此该方法被称为退火方法(或伪退火方 法)。注意,使能量增加的状态转变的概率性发生对应于物理学中的热激 发。
[0259]
图8示出了执行退火方法的退火机的功能配置的示例。然而,在以 下描述中,还描述了生成多个状态转变候选的情况。然而,基本的退火 方法一次生成一个转变候选。
[0260]
退火机300包括保持当前状态s(多个状态变量值)的状态保持单 元111。此外,退火机300包括能量计算单元112,能量计算单元112计 算在由于多个状态变量值中的任何一个状态变量值的变化而发生相对于 当前状态s的状态转变时每个状态转变的能量变化值{-δei}。另外,退 火机300包括控制温度值t的温度控制单元113以及控制状态变化的转 变控制单元114。注意,退火机300可以是以上描述的优化装置100的一 部分。
[0261]
转变控制单元114基于温度值t、能量变化值{-δei}和随机数值根据 能量变化值{-δei}与热激发能量之间的相对关系概率性地确定是否接受 多个状态转变中的任何一个状态转变。
[0262]
此处,转变控制单元114包括:候选生成单元114a,其生成状态转 变候选;以及可用性确定单元114b,其用于基于能量变化值{-δei}和温 度值t概率性地确定是否允许针对各候选的状态转变。此外,转变控制 单元114包括:转变确定单元114c,其从被允许的候选中确定要采用的 候选;以及随机数生成单元114d,其生成随机变量。
[0263]
退火机300在一次迭代中的操作如下。
[0264]
首先,候选生成单元114a生成从保持在状态保持单元111中的当前 状态s到下一状态的一个或更多个状态转变候选(候选编号{ni})。接下 来,能量计算单元112使用当前状态s和状态转变候选来计算被列为候 选的每个状态转变的能量变化值{-δei}。可用性确定单元114b使用由温 度控制单元113生成的温度值t和由随机数生成单元114d生成的随机变 量(随机数值)根据每个状态转变的能量变化值{-δei}以上述式(1)的 允许概率来允许状态转变。
[0265]
然后,可用性确定单元114b输出每个状态转变的可用性{fi}。在存 在多个被允许的状态转变的情况下,转变确定单元114c使用随机数值随 机地选择被允许的状态转变中的一个状态转变。然后,转变确定单元114c 输出所选择的状态转变的转变编号n和转变可用性f。在存在一个被允许 的状态转变的情况下,根据所采用的状态转变来更新存储在状态保持单 元111中的状态变量值。
[0266]
从初始状态开始,在温度控制单元113降低温度值的同时重复上述 迭代。当满足完成确定条件例如达到一定迭代计数或能量下降到一定值 以下时,操作完成。退火机300输出的答案是操作完成时的状态。
[0267]
图8所示的退火机300可以通过使用例如半导体集成电路来实现。 例如,转变控制单元114可以包括用作随机数生成单元114d的随机数生 成电路、用作可用性确定单元114b的至少一部分的比较电路、稍后将描 述的噪声表等。
[0268]
关于图8所示的转变控制单元114,将进一步描述在式(1)中表示 的允许概率下允许状态转变的机制的细节。
[0269]
通过在具有两个输入a和b、当满足a》b时输出1并且当满足a《 b时输出0的比较器中针对输入a输入允许概率p并且针对输入b输入 取区间[0,1)的值的均匀随机数,可以实现在允许概率p下输出1并且在 允许概率(1-p)下输出0的电路。因此,如果将使用式(1)基于能量 变化值和温度值t计算出的允许概率p的值输入至该比较器的输入a, 则可以实现上述功能。
[0270]
这意味着,利用在f(δe/t)大于u时输出1的电路,可以实现上述功 能,在f(δe/t)中,f是在式(1)中使用的函数,并且u是取区间[0,1)中 的值的均匀随机数。
[0271]
此外,通过进行以下修改也可以实现与上述功能相同的功能。
[0272]
将相同的单调递增函数应用于两个数字不会改变大小关系。因此, 即使将相同的单调递增函数应用于比较器的两个输入,也不会改变输出。 如果采用f的反函数f-1
作为该单调递增函数,则可以看出,可以给出在
ꢀ‑
δe/t大于f-1
(u)时输出1的电路。此外,由于温度值t为正,因此可以 看出,在-δe大于tf-1
(u)时输出1的电路可能就足够了。
[0273]
图8中的转变控制单元114是实现反函数f-1
(u)的转换表并且可以包 括噪声表,该噪声表针对作为离散化区间[0,-1)的输入输出下一函数的值。
[0274][0275][0276]
图9是示出转变控制单元114的操作流程的示例的图。图9所示的 操作流程包括:选择一个状态转变作为候选的步骤(s0001);通过将温 度值和随机数值的乘积与针对状态转变的能量变化值进行比较来确定状 态转变的可用性的步骤(s0002);以及在允许状态转变的情况下采用该 状态转变并且在不允许状态转变的情况下不采用该状态转变的步骤 (s0003)。
[0277]
(优化方法)
[0278]
本案中公开的优化方法是优化对象的形状的优化方法,该优化方法 包括:
[0279]
通过使用基于多个元素中的每个元素对对象的预定特性的贡献的目 标函数方程并针对对象的每个元素指定是否布置对象的每个元素来指定 对象的形状的优化处理,所述多个元素中的每个元素是通过划分要布置 在设计区域中的对象而获得的。
[0280]
本案中公开的优化方法可以由例如本案中公开的优化装置执行。此 外,例如,可以使本案中公开的优化方法中的合适模式与本案中公开的 优化装置中的合适模式类似。
[0281]
(优化程序)
[0282]
在本案中公开的优化程序是用于优化对象的形状的优化程序,该优 化程序用于使计算机执行以下处理:通过使用基于多个元素中的每个元 素对对象的预定特性的贡献
的目标函数方程并且针对对象的每个元素指 定是否布置对象的每个元素来指定对象的形状,所述多个元素中的每个 元素是通过划分要布置在设计区域中的对象而获得的。
[0283]
本案中公开的优化程序可以是例如使计算机执行本案中公开的优化 方法的程序。此外,例如,可以使本案中公开的优化程序中的合适模式 与本案中公开的优化装置中的合适模式类似。
[0284]
本案中公开的优化程序可以根据要使用的计算机系统的配置、操作 系统的类型和版本等使用各种已知的编程语言来创建。
[0285]
本案中公开的优化程序可以记录在诸如内置硬盘或外置硬盘的记录 介质中,或者也可以记录在诸如cd-rom、dvd-rom、mo磁盘或usb 存储器的记录介质中。
[0286]
此外,在本案中公开的优化程序被记录在如以上所描述的记录介质 中的情况下,可以直接使用该程序或者可以将该程序安装到硬盘中并且 然后根据需要通过包括在计算机系统中的记录介质读取器来使用该程序。 此外,本案中公开的优化程序可以被记录在可通过信息通信网络从计算 机系统访问的外部存储区域(另一计算机等)中。在本案中,在本案中 公开的记录在外部存储区域中的优化程序可以直接使用,或者可以被安 装在硬盘中并且然后根据需要通过信息通信网络从外部存储区域使用。
[0287]
注意,本案中公开的优化程序可以针对任何处理中的每一个而划分, 并且被记录在多个记录介质中。
[0288]
(计算机可读记录介质)
[0289]
本案中公开的计算机可读记录介质记录本案中公开的优化程序。
[0290]
本案中公开的计算机可读记录介质不限于任何特定介质,并且可以 根据目的适当地选择。计算机可读记录介质的示例包括内置硬盘、外部 硬盘、cd-rom、dvd-rom、mo盘、usb存储器等。
[0291]
此外,本案中公开的计算机可读记录介质可以是多个记录介质,其 中针对任何处理中的每一个划分并记录本案中公开的优化程序。
[0292]
示例
[0293]
将描述在本案中公开的技术的示例。然而,本案中公开的技术不限 于这些示例。
[0294]
此外,在以下示例中,作为本案中公开的技术中的优选示例,将描 述对象为磁屏蔽件、预定特性为磁通量的屏蔽性能并且贡献为磁化矢量 的示例。
[0295]
(示例1)
[0296]
作为示例1,使用在本案中公开的优化装置的示例来优化磁屏蔽件的 形状。在示例1中,使用具有图5所示的硬件配置的优化装置根据图7 的流程图所示的流程执行对磁屏蔽件的形状的优化。此外,为了使目标 函数方程最小化(使式(2)中的伊辛模型方程最小化),使用digitalannealer(注册商标)。
[0297]
《贡献(磁化矢量)的指定》
[0298]
首先,在示例1中,执行如下优化:除了考虑磁通量的屏蔽性能作 为磁屏蔽件的预定特性(磁屏蔽件的性能)外还考虑形成磁屏蔽件的磁 性材料的面积来优化磁屏蔽件的形状。更具体地,在示例1中,执行对 磁屏蔽件的形状的搜索,这可以使期望磁力被磁屏蔽件屏蔽的区域(对 象区域)中的磁通密度最小化并且使磁性材料的面积尽可能小(材料的 量尽可能少)。
[0299]
图10是示出对示例1中的磁屏蔽件的形状进行优化时的计算模型的 示例的图。如图10所示,在示例1中,作为期望磁力被磁屏蔽件屏蔽的 区域的对象区域20位于设计区域10的内部,设计区域10是可以布置形 成磁屏蔽件的磁性材料的区域。此外,在示例1中,如图10所示,产生 磁通量的线圈30(10kat(安匝))位于设计区域10上方。注意,在示 例1中,如图10所示,设计区域10和对象区域20左侧的边界是对称边 界40a,并且设计区域10和对象区域20下侧的边界是自然边界40b。
[0300]
图11是示出在示例1中设置的关于形成磁屏蔽件的磁性材料的bh 曲线(磁滞曲线)的示例的图。在示例1中,关于使用磁性材料形成屏 蔽件的示例对磁屏蔽件的形状进行优化,其中,当磁场h被施加至磁性 材料时磁通密度b(t)与磁场(磁场)h(a/m)之间的关系变成如图11所 示的曲线图。
[0301]
然后,在示例1中,针对图10中示出的计算模型执行使用有限元方 法(fem)的分析作为使用数值计算的分析(cae分析)。
[0302]
具体地,在示例1中,通过将图10中示出的计算模型划分成多个元 素,并且通过使用有限元方法的分析以数值方式求解关于二维静磁场的 控制方程来获得磁通密度的分布。也就是说,在示例1中,通过针对被 划分成多个元素的计算模型执行使用有限元方法的分析来获得每个元素 的磁通密度。
[0303]
图12a至图12c是用于描述示例1中通过划分计算模型并通过有限 元方法执行分析获得每个元素中的磁通密度时的流程的示例的图。
[0304]
首先,如图12b所示对图12a中示出的与图10中示出的计算模型 类似的计算模型进行划分以获得多个元素的集合。然后,通过有限元方 法对如图12b所示划分的计算模型进行分析以获得每个元素中的磁通密 度(b),并且如图12c所示指定计算模型中的磁通密度的分布。
[0305]
注意,在示例1中,如在图7的s102中所描述的,将作为磁屏蔽件 的材料的磁性材料布置在图12a的整个设计区域10中的条件设置为用于 优化磁屏蔽件的形状的初始计算模型。此外,在示例1中,对于如图12b 所示划分的设计区域10中的每个元素,将磁性材料布置在第i个元素中 的条件表示为“xi=1”,并且将磁性材料布置在第i个元素中的条件表示 为“xi=0”。
[0306]
此处,在示例1中,在通过使用有限元方法的分析以数值方式求解 二维静磁场的控制方程时,使用下式作为二维静磁场的控制方程。
[0307][0308]
在上述式中,μ表示磁导率,j0表示线圈30中的电流密度并且a表 示矢势。
[0309]
注意,在不存在磁性材料的区域(存在空气的区域)中,磁导率μ 为μ0=4π
×
10-7
(h/m)。此外,根据图11中示出的bh曲线的非线性特性, 在磁性材料存在的区域(在设计区域中布置磁性材料的元素)中,磁导 率μ可以由下式表示:
[0310][0311]
然后,在示例1中,通过使用有限元方法的分析(通过有限元方法 进行仿真)、通过
以数值方式求解关于二维静磁场的上述控制方程来获得 矢势a。接下来,在示例1中,基于所获得的矢量势a通过以下数学式 来获得每个元素中的磁通密度(b),并且指定计算模型中的磁通密度的 分布(与磁通量的屏蔽性能相关的场的分布)。
[0312]
b=rota
[0313]
接下来,在示例1中,基于指定的磁通密度(b)的分布来指定作为 设计区域的分区的每个元素中的磁化矢量m(贡献的示例)。
[0314]
关于每个元素中的磁化矢量m,在设计区域中,元素被分类为其中 布置有磁性材料的元素(单元(cell))和其中没有布置磁性材料的元素 (其中布置有空气的单元),计算并指定磁化矢量m。
[0315]
对于其中布置有磁性材料的元素,基于下式指定磁化矢量m。
[0316][0317]
此处,在上述式中,mi表示第i个元素中的磁化矢量,hi表示第i 个元素中的磁场强度,χ表示磁场强度h的系数,μr表示磁性材料的相对 磁导率,μ0表示空气的磁导率,并且bi表示第i个元素的磁通密度。
[0318]
以这种方式,在示例1中,利用磁性材料的相对磁导率μr、空气的 磁导率μ0以及使用有限元方法获得的磁通密度b来获得作为各元素的贡 献的磁化矢量m。
[0319]
此外,对于其中没有布置磁性材料的元素(其中布置有空气的元素), 磁化矢量m的计算值变为零,因为在针对第i个元素中的磁化矢量mi使用上述方程时相对磁导率为1。因此,在示例1中,作为其中没有布置 磁性材料的元素的磁化矢量m,将使用在重复进行更新磁化矢量并利用 目标函数方程进行优化时的前一步的磁化矢量m。也就是说,在示例1 中,在第n次计算中第i个元素中布置有磁性材料并且在第(n 1)次计 算中第i个元素中没有布置磁性材料的情况下,将第(n 1)次计算中第 i个元素中的磁化矢量m用作第n次计算中第i个元素中的磁化矢量m。
[0320]
图13是示出示例1中在作为磁屏蔽件的材料的磁性材料布置在整个 设计区域的情况下设计区域中的磁通密度分布的示例的图。图13示出了 用圆圈标记的区域中的磁通密度大。
[0321]
图14是示出示例1中在作为磁屏蔽件的材料的磁性材料布置在整个 设计区域的情况下通过划分设计区域的磁屏蔽件获得的每个元素的示例 的图。
[0322]
如图14所示,在示例1中,设计区域中的磁屏蔽件被划分成使得设 计区域10中的磁屏蔽件的每个元素的形状为三角形。注意,在示例1中, 在执行使用有限元方法的分析时用于指定磁通密度的分布的元素(网格) 被按原样用作在使用目标函数方程指定是否布置磁屏蔽件的每个元素时 的元素。
[0323]
《目标函数方程的构造》
[0324]
此处,在示例1中,如下构造(定义)目标函数方程以执行对磁屏 蔽件的形状的搜索,这可以使期望磁力被屏蔽件屏蔽的区域(对象区域) 中的磁通密度最小化并且使磁性材料的面积尽可能小(材料的量尽可能 少)。
[0325]
作为能够获得具有尽可能高的磁通量屏蔽性能和尽可能小的磁性材 料面积的磁屏蔽件的形状的目标函数方程,包括表示对象区域20中的磁 通密度的大小的项与表示设
计区域10中的磁性材料的面积的项的目标函 数方程是有利的。也就是说,在本案中公开的技术的示例中,有利的是, 优化处理单元基于如下目标函数方程执行优化,该目标函数方程包括表 示在磁通量被磁屏蔽件屏蔽的区域中的磁通密度的大小的项以及表示磁 屏蔽件中的磁性材料的面积的项。
[0326]
具体地,在示例1中,基于每个元素中的磁化矢量m定义下式(1) 作为包括表示在磁通量被磁屏蔽件屏蔽的区域中的磁通密度的大小的项 以及表示磁屏蔽件中的磁性材料的面积的项的目标函数方程。
[0327][0328]
注意,在式(1)中,
[0329]
e为目标函数方程,
[0330]
α是正数,
[0331]
e1是表示在设计区域填充空气的情况下磁通量被屏蔽的区域(对象 区域)中的磁通密度的平方的数值,
[0332]nt
是表示磁通量被屏蔽的区域被划分成的元素的数量的整数,
[0333]bk
是表示磁通被屏蔽的区域的第k个元素中的磁通密度的矢量,
[0334]
δsk是表示磁通被屏蔽的区域的第k个元素的面积的数值,
[0335]
β是正数,
[0336]
e2是表示在设计区域填充磁性材料的情况下磁性材料的面积的数值,
[0337]
nd是表示设计区域被划分成的元素的数量的整数,
[0338]
δsi是表示设计区域的第i个元素的面积的数值,并且
[0339]
xi是二进制变量,其在针对设计区域的第i个元素布置磁性材料的情 况下变为1,并且在没有布置磁性材料而布置了空气的情况下变为0。
[0340]
在上述式(1)中,右侧第一项(具有系数α的项)表示磁屏蔽件内 部的对象区域20中的磁通密度的平方,并且右侧第二项(具有系数β的 项)表示形成磁屏蔽件的磁性材料的面积。注意,右侧第一项(具有系 数α的项)中对象区域中的磁通密度bk是通过包括磁化矢量m基于毕奥
ꢀ‑
萨伐尔(biot-savart)定律计算而获得的。
[0341]
通过指定可以使上述式(1)的值最小化的磁屏蔽件的形状,可以指 定可以使存在于磁屏蔽件内部的对象区域20中的磁通密度最小化并且使 磁性材料的面积尽可能小的形状。
[0342]
此外,在右侧第一项(具有系数α的项)中,对象区域中的磁通密 度bk为向量,因此通过求平方将向量转换成标量,将目标函数方程的格 式转换成qubo格式。
[0343]
注意,在示例1中,设置了α=0.95且β=0.05。
[0344]
此处,在上式(1)中,第k个元素中的磁通密度bk是通过使用下 式基于毕奥-萨伐尔定律计算而获得的。
[0345][0346]
注意,在上述式中,
[0347]bk
是表示磁通量被屏蔽的区域(对象区域)的第k个元素中的磁通 密度的矢量,
[0348]
μ0是空气的磁导率,
[0349]
nd是表示设计区域被划分成的元素的数量的整数,
[0350]
xi是二进制变量,其在针对设计区域中的第i个元素布置磁性材料时 变为1,并且在使用空气而不布置磁性材料时变为0,
[0351]
mi是设计区域的第i个元素中的磁化矢量,
[0352]ri,k
是磁通量被屏蔽的区域中的第k个元素与设计区域中的第i个元 素之间的位置矢量,
[0353]
δsi是表示设计区域中第i个元素的面积的数值,
[0354]
nc是表示布置有线圈的区域(线圈区域)被划分成的元素的数量的 整数,
[0355]jj
是表示布置有线圈的区域的第j个元素中的电流密度的矢量,并且
[0356]
δsj是表示布置有线圈的区域中第j个元素的面积的数值。
[0357]
然后,在示例1中,将上述目标函数方程(式(1))转换成由下式 (2)表示的伊辛模型方程,并且通过利用digital annealer(注册商标) 使用退火方法(退火)使转换后的伊辛模型方程最小化。
[0358][0359]
注意,在上述式(2)中,
[0360]
e是被转换成伊辛模型方程的目标函数方程,
[0361]wij
是表示第i位与第j位之间的交互的数值,
[0362]bi
是表示关于第i位的偏差的数值,
[0363]
xi是表示第i位为0或1的二进制变量,并且
[0364]
xj是表示第j位为0或1的二进制变量。
[0365]
《滤波》
[0366]
在示例1中,执行对通过使使用上述式(2)被转换成伊辛模型方程 的目标函数方程最小化而获得的磁屏蔽件的形状进行滤波并将磁屏蔽件 的形状修正为连续形状的处理。
[0367]
注意,在示例1中,使用了上述考虑到每个元素周围的元素来获得 平均密度并基于所获得的平均密度执行滤波的技术。
[0368]
然后,在示例1中,重复更新磁化矢量(贡献)并使用基于所更新 的磁化矢量的目标函数方程进行优化,直至目标函数方程的最小值的变 化变得等于或小于预定值,以优化磁屏蔽件的形状。注意,在示例1中, 执行在每次重复时执行滤波以将磁屏蔽件的形状修正为连续形状的处理。
[0369]
《优化的结果》
[0370]
下面将描述示例1中在重复更新磁化矢量(贡献)并使用基于所更 新的磁化矢量的目标函数方程进行优化的过程中磁屏蔽件的形状。
[0371]
首先,图15是示出将在设置将作为磁屏蔽件的材料的磁性材料布置 在整个设计区域的条件时磁屏蔽件的形状的示例作为示例1中执行优化 时的初始形状的图。
[0372]
图16a是示出在示例1的第一次优化中进行滤波之前磁屏蔽件的形 状的示例的图。图16b是示出在示例1的第一次优化中进行滤波之后磁 屏蔽件的形状的示例的图。
[0373]
类似地,在图17a至图29b中示出从第二次优化到第十四次优化的 滤波之前的磁屏蔽件的形状的示例和滤波之后的磁屏蔽件的形状的示例。 注意,在示例1中,由于在执行第十三次优化时目标函数方程的最小值 的变化以及在执行第十四次优化时目标函数方程的最小值的变化变得等 于或小于预定值,因此在第十四次优化时终止对磁屏蔽件的形状的优化。
[0374]
如图16a至图29b所示,在包括初始形状设置的十五次重复过程中, 形状从具有相对大面积的磁性材料的连续形状逐渐变成具有小面积的磁 性材料的形状,并且最终能够获得图29b中示出的形状。注意,如以上 所描述的,在十五次重复的过程中,针对通过在优化之后执行滤波而获 得的形状再次执行使用有限元方法指定磁化矢量(贡献的示例),并且更 新磁化矢量的值。
[0375]
此外,如图16a至图29b所示,在将滤波前的形状和滤波后的形状 进行比较时发现通过执行滤波难以制造的“散布形状”被修正为连续形 状。
[0376]
图30a是示出在示例1中在设置将作为磁屏蔽件的材料的磁性材料 布置在整个设计区域的条件时磁屏蔽件的形状的示例的图。图30b是示 出在示例1中在设置将作为磁屏蔽件的材料的磁性材料布置在整个设计 区域的条件时在磁屏蔽件的形状中由线圈产生的磁力的磁力线的示例的 图。注意,在图30a和图30b中,磁性材料以浅色区域示出,并且磁力 线以深色线条示出。
[0377]
如图30a和图30b所示,在设置将作为磁屏蔽件的材料的磁性材料 布置在整个设计区域的条件时,在磁屏蔽件的形状中,磁性材料的面积 大但没有磁力线侵入对象区域20,并且磁通量的屏蔽性能高。
[0378]
此外,具有图30a和图30b中示出的形状的磁性材料的面积为 0.75cm2。
[0379]
图31a是示出在示例1中α=0.95且β=0.05的情况下磁屏蔽件的 形状的优化结果的示例的图。图31b是示出在示例1中α=0.95且β= 0.05的情况下在磁屏蔽件的优化结果的形状中由线圈产生的磁力的磁力 线的示例的图。
[0380]
如图31a和图31b所示,在式(1)中设置α=0.95且β=0.05的 情况下,磁性材料的面积明显小于在图31a和图31b中示出的示例中磁 性材料的面积并且磁性材料的面积为0.19cm2。此外,如图31a和图31b 所示,在示例1的优化结果中,虽然如以上所描述的磁性材料的面积小, 但是磁力线几乎不侵入对象区域20,并且能够充分保持磁通量的屏蔽性 能。
[0381]
如以上所描述的,在示例1中,通过使用上述式(1)中示出的目标 函数方程优化磁屏蔽件的形状,针对对象区域的磁通量屏蔽性能充分并 且能够指定可以抑制磁性材料的面积的形状。
[0382]
(示例2)
[0383]
在示例2中,以与示例1类似的方式优化磁屏蔽的形状,不同之处 在于在示例1中
engineering,卷14,第13-18 页,2014年”中描述了关于该现有技术示例的细节。
[0399]
此外,例如,在使用如现有技术中描述的离散拓扑优化并且有限元 方法中的元素的数量(网格的数量)为n的情况下,需要通过有限元方 法进行2n次计算,并且计算成本相对于有限元方法中的元素的数量呈指 数增长。
[0400]
如以上描述的,在本案中公开的技术的示例中,与现有技术相比, 可以显著减少通过有限元方法(数值计算方法的示例)执行计算成本大 的处理的次数。因此,可以缩短计算时间并在短时间内优化形状。
[0401]
图37是示出在本案中公开的技术的一个实施方式中的处理的流程的 示例的图。
[0402]
如图37所示,在本案中公开的技术的一个实施方式中,首先,将要 布置在设计区域中的对象划分成多个元素的集合(“1.设计区域的元素划 分”)。接下来,在本案中公开的技术的一个实施方式中,通过对包括被 划分成元素的设计区域的计算模型执行cae分析来分析用于指定对对象 的预定特性的贡献的物理量的分布(“2.通过cae分析来分析物理量的分 布”)。
[0403]
接下来,如图37所示,在本案中公开的技术的一个实施方式中,基 于所分析的物理量的分布来指定每个元素的贡献(“3.指定元素的贡献”)。 然后,在本案公开的技术的一个实施方式中,构造基于所指定的贡献的 目标函数方程(“4.目标函数方程的构造”)。
[0404]
接下来,如图37所示,在本案中公开的技术的一个实施方式中,通 过退火方法(annealing)对目标函数方程进行优化(“5.通过退火方法对 目标函数方程进行优化”)。接下来,在本案公开的技术的一个实施方式 中,对通过优化目标函数方程而获得的对象的形状进行滤波以使其成为 连续形状(“6.对所获得的形状进行滤波”)。
[0405]
然后,如图37所示,在本案中公开的技术的一个实施方式中,在目 标函数方程的最小值的变化等于或大于预定值的情况下,在“2.通过cae 分析来分析物理量的分布”中执行处理,并且执行迭代处理以获得更合 适的形状(“7.在目标函数方程的值存在变化时进行迭代处理”)。
[0406]
此外,在本案中公开的技术的一个实施方式中,在目标函数方程的 最小值的变化等于或小于预定值的情况下,认为已经完成了充分优化并 且输出优化的结果(对象的形状)(“8.在目标函数方程值不变时输出最终 形状”)。
[0407]
在本案中公开的技术的一个实施方式中,例如,通过执行如图37所 示的处理,可以在短时间内且充分地优化对象的形状。
[0408]
本文提供的所有示例和条件语言旨在用于帮助读者理解本发明和发 明人对进一步发展本领域所贡献的构思的教学目的,并且不应被解释为 受限于这些具体叙述的示例和条件,说明书中这些示例的组织也不涉及 本发明的优势和劣势的展示。尽管已经详细描述了本发明的一个或更多 个实施方式,但是应当理解,在不脱离本发明的精神和范围的情况下, 可以对其进行各种改变、替换和变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。