1.本发明涉及晶体生长技术领域,尤其涉及一种碳化硅晶体生长的控制方法及装置。
背景技术:
2.碳化硅是一种宽禁带半导体材料,以碳化硅单晶衬底制作的器件具有耐高温、耐高压、高频、大功率、抗辐射、效率高等优势,在射频、新能源汽车等领域具有重要的应用价值。
3.现有技术中,通常采用溶液法生长碳化硅晶体,具体地,溶液法的基本原理是:将含硅助熔剂置于石墨坩埚中,利用感应加热的方式熔化助熔剂,石墨坩埚中的碳溶解到助熔剂中;然后将碳化硅籽晶置于助熔剂的液面,由于籽晶处的过冷,碳在籽晶的固液界面上析出,并和助熔剂中的硅结合形成碳化硅晶体。
4.由于碳化硅晶体的生长在密闭腔室内的高温环境中进行,难以对生长的碳化硅晶体进行清晰的观察和准确的测量,存在提拉籽晶移动的过快或过慢的问题,进而影响生长的碳化硅晶体的品质。
技术实现要素:
5.本发明的目的在于提供一种碳化硅晶体生长的控制方法及装置,能够根据碳化硅晶体的生长情况控制籽晶的移动速度,降低籽晶移动过快或过慢的几率,进而保证生长的碳化硅晶体的品质。
6.如上构思,本发明所采用的技术方案是:
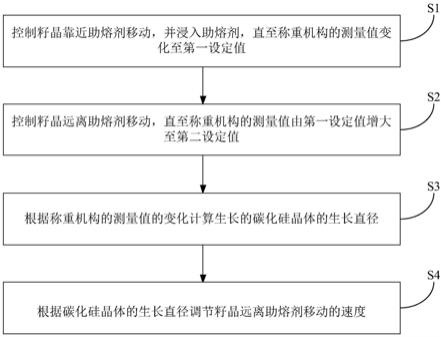
7.一种碳化硅晶体生长的控制方法,包括如下步骤:
8.控制籽晶靠近助熔剂移动,并浸入助熔剂,直至称重机构的测量值变化至第一设定值;
9.控制所述籽晶远离所述助熔剂移动,直至所述称重机构的测量值由所述第一设定值增大至第二设定值;
10.根据所述称重机构的测量值的变化计算生长的碳化硅晶体的生长直径;
11.根据所述碳化硅晶体的生长直径调节所述籽晶远离所述助熔剂移动的速度。
12.可选地,在控制籽晶靠近助熔剂移动时,所述称重机构的测量值的计算公式为:
13.g1=g
0-ρ1×g×s×
δh
14.其中,g1表示籽晶靠近助熔剂移动阶段称重机构的测量值;g0表示所述籽晶浸入所述助熔剂前称重机构的测量值;ρ1表示助溶剂的溶液密度;g表示重力加速度;s表示所述籽晶的底面积;δh表示所述籽晶的浸入深度。
15.可选地,控制所述籽晶远离所述助熔剂移动时,所述称重机构的测量值的计算公式为:
16.g2=g0 ρ1×g×s×
δl
×f17.其中,g2表示籽晶远离助熔剂移动阶段称重机构的测量值;g0表示所述籽晶浸入所述助熔剂前称重机构的测量值;ρ1表示助溶剂的溶液密度;g表示重力加速度;s表示所述籽晶的底面积;δl表示被所述籽晶拉起的溶液的高度;f表示被所述籽晶拉起的溶液的形状修正系数。
18.可选地,通过调节所述籽晶远离所述助熔剂移动的速度,调节被所述籽晶拉起的溶液的高度,且被所述籽晶拉起的溶液的高度与所述籽晶的移动速度正相关。
19.可选地,通过调节被所述籽晶拉起的溶液的高度,调节所述碳化硅晶体的生长角度,且所述碳化硅晶体的生长角度与被所述籽晶拉起的溶液的高度负相关。
20.可选地,在根据所述称重机构的测量值的变化计算生长的碳化硅晶体的生长直径采用的计算公式为:
[0021][0022]
其中,d表示碳化硅晶体的生长直径;δg表示在时间段δt内所述称重机构的测量值增加值;ρ2表示碳化硅晶体的密度;g表示重力加速度;v表示碳化硅晶体在预设方向上的生长速度。
[0023]
可选地,所述根据所述碳化硅晶体的生长直径调节所述籽晶远离所述助熔剂移动的速度,包括:
[0024]
将所述碳化硅晶体的生长直径与目标直径进行比较,当所述碳化硅晶体的生长直径大于所述目标直径,则提高所述籽晶远离所述助熔剂移动的速度;当所述碳化硅晶体的生长直径小于所述目标直径,则降低所述籽晶远离所述助熔剂移动的速度。
[0025]
一种碳化硅晶体生长的控制装置,应用于上述的碳化硅晶体生长的控制方法,包括:
[0026]
石墨坩埚,所述石墨坩埚用于容置助熔剂;
[0027]
籽晶杆,所述籽晶杆的一端伸入所述石墨坩埚内且端面固设有籽晶;
[0028]
提拉机构,连接于所述籽晶杆的另一端;
[0029]
称重机构,连接于所述籽晶杆,并用于测量所述籽晶杆、固定于所述籽晶杆上的籽晶以及在籽晶上生长的碳化硅晶体的重量;
[0030]
控制器,控制连接于所述提拉机构及所述称重机构,所述控制器用于控制所述籽晶靠近或远离所述助熔剂移动,用于获取所述称重机构的测量值并计算生长的碳化硅晶体的直径,以及用于根据所述碳化硅晶体的直径调节所述籽晶远离所述助熔剂移动的速度。
[0031]
可选地,还包括旋转机构;
[0032]
所述旋转机构连接于所述籽晶杆的另一端,所述称重机构连接于所述旋转机构,所述提拉机构连接于所述称重机构;或者,所述称重机构连接于所述籽晶杆的另一端,所述旋转机构连接于所述称重机构,所述提拉机构连接于所述旋转机构。
[0033]
可选地,所述籽晶杆包括上段和下段,所述称重机构连接于所述上段和所述下段之间,所述下段未连接所述称重机构的一端的端面固设有所述籽晶,所述提拉机构连接于所述上段。
[0034]
本发明提供的碳化硅晶体生长的控制方法及装置具有如下有益效果:
[0035]
先控制籽晶浸入助溶剂中,直至称重机构的测量值降低至第一设定值;然后,控制籽晶远离助溶剂移动,直至称重机构的测量值由第一设定值增大至第二设定值。之后,在碳化硅晶体生长的过程中,根据称重机构的测量值在设定时间段内的变化情况计算得到碳化硅晶体的生长直径,并根据该生长直径调节籽晶移动的速度,而籽晶移动速度发生变化则会反向影响碳化硅晶体的生长直径,进而实现在整个碳化硅晶体生长过程中动态维持碳化硅晶体生长直径在一个设定范围内,使得能够根据碳化硅晶体的生长情况控制籽晶的移动速度,降低籽晶移动过快或过慢的几率,进而保证生长的碳化硅晶体的品质。
附图说明
[0036]
图1是本发明实施例一提供的碳化硅晶体生长的控制方法的流程图;
[0037]
图2是本发明实施例一提供的籽晶浸入助溶剂时的结构示意图;
[0038]
图3是本发明实施例一提供的籽晶、助溶剂及被籽晶拉起的溶液的示意图;
[0039]
图4是本发明实施例一提供的籽晶、助溶剂、生长的碳化硅晶体及被籽晶拉起的溶液的示意图;
[0040]
图5是本发明实施例二提供的碳化硅晶体生长的控制装置的结构示意图;
[0041]
图6是本发明实施例二提供的籽晶杆、旋转机构、称重机构及提拉机构的一种连接方式的示意图;
[0042]
图7是本发明实施例二提供的籽晶杆、旋转机构、称重机构及提拉机构的另一种连接方式的示意图。
[0043]
图中:
[0044]
1、石墨坩埚;2、籽晶杆;21、上段;22、下段;3、提拉机构;4、称重机构;5、控制器;6、旋转机构;7、腔室;8、石墨托;9、坩埚托;10、隔热套;20、感应线圈;
[0045]
100、籽晶;200、助熔剂;300、弯月面;400、碳化硅晶体。
具体实施方式
[0046]
为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部。
[0047]
在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0048]
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示
第一特征水平高度小于第二特征。
[0049]
在本实施例的描述中,术语“上”、“下”、“右”、等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
[0050]
实施例一
[0051]
现有技术中,较难控制碳化硅籽晶下表面和助熔剂熔体液面之间的距离、控制晶体生长的直径等。通常在控制系统中预先设定液面的高度,然后将碳化硅籽晶移动至该高度,从而使得籽晶接触液面,然后根据预测的碳化硅晶体的生长速度控制籽晶的提拉速度。但是,由于助熔剂蒸发、坩埚腐蚀等因素,预设的液面高度可能不准确,且碳化硅晶体的生长速度也可能与预测的存在偏差,导致无法实时判断碳化硅籽晶和液面的接触或浸入情况,进而影响生长的碳化硅晶体的品质。
[0052]
本实施例提供了一种碳化硅晶体生长的控制方法,能够根据碳化硅晶体的生长情况控制籽晶的移动速度,降低籽晶移动过快或过慢的几率,进而保证生长的碳化硅晶体的品质。
[0053]
如图1所示,碳化硅晶体生长的控制方法包括如下步骤:
[0054]
s1、控制籽晶100靠近助熔剂移动,并浸入助熔剂,直至称重机构的测量值变化至第一设定值。
[0055]
本实施例中,通过溶液法生长碳化硅晶体400,助溶剂200置于石墨坩埚中,助溶剂200为含硅元素的助溶剂200,以使得助溶剂200中的硅能与石墨坩埚溶解在助溶剂200中的碳形成碳化硅晶体400。可以理解的是,除了硅之外,助溶剂200还可以包括钛ti、铬cr、钪sc、镍ni、铝al、钴co、锰mn、镁mg、锗ge、砷as、硼p、氮n、氧o、硼b、镝dy、钇y、铌nb、钕nd、铁fe中的一种或多种元素。
[0056]
需要说明的是,籽晶100可以通过籽晶杆固定,称重机构连接在籽晶杆上并能够对籽晶杆、固定在籽晶杆上的籽晶100以及在籽晶100上生长的碳化硅晶体400进行称重。本实施例中,籽晶100未浸入到助溶剂200中时,称重机构的测量值等于籽晶100与籽晶杆的重量和。籽晶100可以浸入助溶剂200一定的深度,且籽晶100及籽晶杆受到助溶剂200的浮力(于图1中该浮力采用f
浮力
表示)。此时,称重机构的测量值会逐渐减小,籽晶100浸入助溶剂200中的深度越大,称重机构的测量值越小,因此,可以通过称重机构的测量值控制籽晶100浸入助溶剂200的深度。需要说明的是,籽晶100浸入助溶剂200的深度即为籽晶100下表面和助溶剂200液面之间的距离。当称重机构的测量值减小至第一设定值时,停止籽晶100及籽晶杆的移动,此时,如图2所示,籽晶100浸入助溶剂200的深度为δh。本实施例中,f
浮力
的计算公式为:
[0057]f浮力
=ρ1×g×s×
δh=g
0-g1[0058]
其中,g1表示籽晶100靠近助熔剂移动阶段称重机构的测量值;g0表示籽晶100浸入助熔剂前称重机构的测量值;ρ1表示助溶剂200的溶液密度;g表示重力加速度;s表示籽晶100的底面积;δh表示籽晶100的浸入深度。
[0059]
经过对上式的推导变形,可以得到在控制籽晶100靠近助溶剂200移动的过程中,称重机构的测量值的计算公式为:
[0060]
g1=g
0-ρ1×g×s×
δh
[0061]
在一些实施例中,助溶剂200的溶液组分为60%的硅(si)和40%的铬(cr),计算可以得到溶液助溶剂200的溶液密度ρ1为4.4g/cm3,若籽晶100的尺寸为4寸,直径约为100毫米,计算可知籽晶100每浸入助溶剂200中0.1毫米,对应的称重机构的测量值减小0.0338牛顿(n),换算为重量变化为3.38克,称重机构的分辨率为0.1克,使得籽晶100及籽晶杆的重量变化能够被称重机构检测到。
[0062]
步骤s1用于建立碳化硅晶体400生长的初始条件,以便于后序的对比。并且,在步骤s1中,称重机构实时对籽晶100及籽晶杆的重量进行测量。
[0063]
s2、控制籽晶100远离助熔剂移动,直至称重机构的测量值由第一设定值增大至第二设定值。
[0064]
在步骤s2中,可以通过带动籽晶杆移动,进而带动籽晶100远离助溶剂200移动,在籽晶100远离助溶剂200移动的过程中,于图3中,籽晶100向上移动,籽晶100浸入助溶剂200的深度减小,使得籽晶100受到的浮力也减小,此时,称重机构的测量值相应增大。如图3所示,籽晶100的下表面可以高于助溶剂200的液面,并能够形成如图3所示的弯月面300,需要说明的是,形成弯月面300的原因是:溶液具有一定的表面张力,籽晶100下表面高于助溶剂200的液面时,在表面张力的作用下会拉起一部分溶液,该一部分溶液的表面形成弯月面300。
[0065]
可选地,被拉起的一部分溶液会在籽晶100上施加一个额外的张力,于图3中,该额外的张力用f
张力
表示,根据受力分析可知,额外的张力用f
张力
等于被拉起的溶液的重力,因此,可以得到公式
[0066]g2-g0=f
张力
=ρ1×g×s×
δl
×f[0067]
其中,g2表示籽晶100远离助熔剂移动阶段称重机构的测量值;g0表示籽晶100浸入助熔剂前称重机构的测量值;ρ1表示助溶剂200溶液的密度;g表示重力加速度;s表示籽晶100的底面积;δl表示被籽晶100拉起的溶液的高度;f表示被籽晶100拉起的溶液的形状修正系数。
[0068]
需要说明的是,被籽晶100拉起的溶液的外形轮廓通常不是标准的圆柱体,因此,需要对上述公式进行修正,以提高计算的准确性。在一些实施例中,f=1,即被籽晶100拉起的溶液近似为圆柱形。
[0069]
对上式进行推导变形,可以得到控制籽晶100远离助熔剂移动时,称重机构的测量值的计算公式为:
[0070]
g2=g0 ρ1×g×s×
δl
×f[0071]
由上式可知,被籽晶100拉起的溶液具有不同的高度(δl不同时),称重机构的测量值会不同,也就是说,可以通过将称重机构的测量值增加至某设定值(即本实施例中的第二设定值)的方式,控制被籽晶100拉起的溶液高度,即籽晶100下表面和溶液液面之间的距离。
[0072]
可选地,在一些实施例中,助溶剂200的溶液组分为60%的硅(si)和40%的铬(cr),计算可以得到溶液助溶剂200的溶液密度ρ1为4.4g/cm3,若籽晶100的尺寸为4寸,直径约为100毫米,计算可知被籽晶100拉起的溶液的高度为0.1毫米,对应的称重机构的测量值增大0.0338牛顿(n),换算为重量变化为3.38克,使得籽晶100及籽晶杆的重量变化能够被
称重机构检测到。
[0073]
形成如图3所示的弯月面300能够具有的有益效果为:能够改善籽晶100下表面温度分布的均匀性,抑制助溶剂200中的不良晶体粘附在形成的碳化硅晶体400的下表面,进而保证形成的碳化硅晶体400的纯度,改善碳化硅晶体400的生长;并且,还有助于形成内凹生长面,进而降低结晶界面的粗糙程度,提高形成的碳化硅晶体400的品质。
[0074]
需要说明的是,在步骤s2中,碳化硅晶体400开始在籽晶100上生长。
[0075]
s3、根据称重机构的测量值的变化计算生长的碳化硅晶体400的生长直径。
[0076]
根据称重机构实时测量的测量值,可以计算测量值的变化,该测量值的变化能够反应碳化硅晶体400的生长情况,因此,可以准确地掌握碳化硅晶体400的生长情况。本实施例中,可以根据称重机构的测量值在一段时间内的变化情况计算得到碳化硅晶体400的直径。
[0077]
可选地,在根据称重机构的测量值的变化计算生长的碳化硅晶体400的生长直径采用的计算公式为:
[0078][0079]
其中,d表示碳化硅晶体400的生长直径;δg表示在时间段δt内称重机构的测量值增加值;ρ2表示碳化硅晶体400的密度;g表示重力加速度;v表示碳化硅晶体400在预设方向上的生长速度。本实施例中,预设方向为垂直于籽晶100下表面的竖直方向,且碳化硅晶体400在预设方向上的生长速度正比于籽晶100向上提拉的速度。
[0080]
由于碳化硅晶体400的生长速度较缓慢,因此,δt通常取0.1~1小时,在一些实施例中,δt取0.5小时。
[0081]
需要说明的是,根据上述计算公式计算得到的碳化硅晶体400的生长直径可以为在时间段δt内碳化硅晶体400的平均生长直径。
[0082]
s4、根据碳化硅晶体400的生长直径调节籽晶100远离助熔剂移动的速度。
[0083]
本实施例中,根据碳化硅晶体400的生长直径调整籽晶100远离助溶剂200移动的速度,以防止出现籽晶100移动过快或过慢的情况。
[0084]
可见,在本实施例中,每隔一定的时间间隔,籽晶100(或碳化硅晶体400)的向上提拉速度都会根据称重机构的测量值进行调整,从而在整个碳化硅晶体400生长过程中动态地维持碳化硅晶体400的生长直径在一个所设定的范围内。
[0085]
本实施例提供的碳化硅晶体生长的控制方法,先控制籽晶100浸入助溶剂200中,直至称重机构的测量值降低至第一设定值,然后在碳化硅晶体400生长的过程中,控制籽晶100远离助溶剂200移动,直至称重机构的测量值由第一设定值增大至第二设定值,之后根据称重机构的测量值在设定时间段内的变化情况计算得到碳化硅晶体400的生长直径,并根据该生长直径调节籽晶100移动的速度,而籽晶100移动速度发生变化则会反向影响碳化硅晶体400的生长直径,进而实现在整个碳化硅晶体400生长过程中动态维持碳化硅晶体400生长直径在一个设定范围内,使得能够根据碳化硅晶体400的生长情况控制籽晶100的移动速度,降低籽晶100移动过快或过慢的几率,进而保证生长的碳化硅晶体400的品质。
[0086]
可选地,本实施例中,可以通过控制器执行步骤s1~s4,并且,控制器中预先存储
有目标直径,也即是目标生长直径。在步骤s4中,将碳化硅晶体400的生长直径与目标直径进行比较,当碳化硅晶体400的生长直径大于目标直径,则提高籽晶100远离助熔剂移动的速度;当碳化硅晶体400的生长直径小于目标直径,则降低籽晶100远离助熔剂移动的速度。
[0087]
本实施例中,通过调节籽晶100远离助熔剂移动的速度,能够调节被籽晶100拉起的溶液的高度,且籽晶100远离助溶剂200移动的速度越大,被籽晶100拉起的溶液的高度越高;籽晶100远离助溶剂200移动的速度越小,被籽晶100拉起的溶液的高度越低。也即是,被籽晶100拉起的溶液的高度与籽晶100的移动速度正相关。
[0088]
进一步地,通过调节被籽晶100拉起的溶液的高度,能够调节碳化硅晶体400的生长角度,且被籽晶100拉起的溶液的高度越大,碳化硅晶体400的生长角度越小;被籽晶100拉起的溶液的高度越小,碳化硅晶体400的生长角度越大。也即是,碳化硅晶体400的生长角度与被籽晶100拉起的溶液的高度负相关。其中,碳化硅晶体400的生长角度θ为被籽晶100拉起的溶液的侧表面与竖直面的夹角。
[0089]
具体的,通过改变被籽晶100拉起的溶液的高度可以改变碳化硅晶体400的生长角度θ,从而调节碳化硅晶体400的生长直径,碳化硅晶体400的生长直径为形成的整块碳化硅晶体的直径。被籽晶100拉起的溶液的高度越大,碳化硅晶体400的生长角度θ越小,碳化硅晶体400的生长直径有减小的趋势;被籽晶100拉起的溶液的高度越小,碳化硅晶体400的生长角度θ越大,碳化硅晶体400的生长直径有增加的趋势。而通过改变籽晶100(或碳化硅晶体400)向上提拉的速度,可以改变被籽晶100拉起的溶液的高度,从而控制碳化硅晶体400的生长直径的变化趋势。具体而言,增加籽晶100向上提拉的速度,被籽晶100拉起的溶液的高度会增加,碳化硅晶体400的生长直径会逐渐变小;降低籽晶100向上提拉的速度,被籽晶100拉起的溶液的高度会减小,碳化硅晶体400的生长直径会逐渐增大。
[0090]
实施例二
[0091]
本实施例提供了一种碳化硅晶体生长的控制装置,应用于实施例一中的碳化硅晶体生长的控制方法,如图5所示,碳化硅晶体生长的控制装置包括石墨坩埚1、籽晶杆2、提拉机构3、称重机构4及控制器5。
[0092]
其中,石墨坩埚1用于容置助熔剂。籽晶杆2的一端伸入石墨坩埚1内且端面固设有籽晶100。提拉机构3连接于籽晶杆2的另一端,并用于带动籽晶杆2靠近或远离助溶剂200移动,进而调动籽晶100远离或靠近助溶剂200移动。在一些实施例中,提拉机构3为气缸、直线电机等能够实现直线驱动的部件。
[0093]
称重机构4连接于籽晶杆2,并用于测量籽晶杆2、固定于籽晶杆2上的籽晶100以及在籽晶100上生长的碳化硅晶体的总重量。在一些实施例中,当籽晶100上未生长碳化硅晶体时,称重机构4用于测量籽晶杆2及固定于籽晶杆2上的籽晶100的总重量。在另外一些实施例中,如图5所示,籽晶杆2上可以设置有石墨托8,此时,称重机构4用于测量籽晶杆2、固定于籽晶杆2上的籽晶100及石墨托8的总重量。在一些实施例中,称重机构4可以为现有技术中的称重传感器,只要能实现对籽晶杆2、固定于籽晶杆2上的籽晶100及石墨托8的总重量进行测量即可。
[0094]
上述控制器5控制连接于提拉机构3及称重机构4。并且,控制器5用于通过提拉机构3及籽晶杆2控制籽晶100靠近或远离助熔剂移动,控制器还用于获取称重机构4的测量值并计算生长的碳化硅晶体的直径,以及用于根据碳化硅晶体的直径调节籽晶远离助熔剂移
动的速度。其中,控制器根据称重机构的测量值的变化计算生长的碳化硅晶体的生长直径的具体方法可参见实施例一,本实施例在此不做赘述。
[0095]
可以理解的是,为了能通过溶液法生长碳化硅晶体,如图5所示,碳化硅晶体生长的控制装置还包括腔室7、坩埚托9、隔热套10及感应线圈200。
[0096]
其中,腔室7用于为碳化硅晶体的生长提供相对密封的空间,且腔室7具有至少一个抽气口,通过抽气口能对腔室7抽真空。在一些实施例中,抽气口与真空装置连接,使得真空装置能够通过抽气口对腔室7进行抽气,以将腔室7内的气压降低至所需的数值。需要说明的是,腔室7还连接至少一个真空计,真空计用于测量腔室7内的压力。本实施例中,腔室7还具有至少一个充气口,通过充气口可以向腔室7内充入氮气、氩气、氦气或其他惰性气体,以使得晶体能够在惰性气体环境下生长。
[0097]
感应线圈20和石墨坩埚1分别设于腔室7内,且石墨坩埚1用于容置助溶剂200。感应线圈20用于对石墨坩埚1内的助溶剂200进行感应加热,使得石墨坩埚1中的助溶剂200熔融。在一些实施例中,感应线圈20有多个匝,围绕石墨坩埚1间隔设置,以实现均匀加热。感应线圈20的电流频率为1~100khz,且感应线圈20是中空结构的,能够通水冷却。感应线圈20感应加热的原理可以参见现有技术,本实施例在此不做介绍。
[0098]
坩埚托9承托着石墨坩埚1的底壁,并用于带动石墨坩埚1旋转和上下运动。在一些实施例中,籽晶杆2和坩埚托9中可以分别设置气体冷却流道,以分别对籽晶100及石墨坩埚1进行冷却。石墨坩埚1设置于隔热套10内,感应线圈20位于隔热套10外,坩埚托9及籽晶杆2分别穿设于隔热套10,隔热套10采用隔热材质制成,并用于石墨坩埚1的保温隔热。
[0099]
可选地,碳化硅晶体生长的控制装置还包括旋转机构6,旋转机构6用于带动籽晶杆2旋转。控制器5控制连接于旋转机构6,以能够控制旋转机构6的启停及旋转速度。示例地,旋转机构6可以包括电机等部件。
[0100]
本实施例中,籽晶杆2、旋转机构6、称重机构4及提拉机构3的连接方式可以具有多种,本实施例提供如下几种连接方式。
[0101]
在一种连接方式中,如图5所示,旋转机构6连接于籽晶杆2的另一端,称重机构4未直接连接籽晶杆2,而是连接于旋转机构6,此时,称重机构4能够测量籽晶杆2、石墨托8、生长的碳化硅晶体及旋转机构6的总重量。提拉机构3连接于称重机构4,提拉机构3通过带动称重机构4移动而实现带动籽晶杆2移动。
[0102]
在另一种连接方式中,如图6所示,称重机构4连接于籽晶杆2的另一端,旋转机构6未直接连接于籽晶杆2,而是连接于称重机构4,此时,称重机构4测量籽晶杆2、石墨托8及生长的碳化硅晶体的总重量,从而能够减少称重机构4的量程,提高测量的精度。旋转机构6通过带动称重机构4旋转而间接带动籽晶杆2旋转。提拉机构3未直接连接于籽晶杆2,而是连接于旋转机构6,提拉机构3通过旋转机构6及称重机构4间接带动籽晶杆2移动。
[0103]
在又一种连接方式中,如图7所示,籽晶杆2包括上段21和下段22,称重机构4连接于上段21和下段22之间,下段22未连接称重机构4的一端的端面固设有石墨托8,籽晶100固定在石墨托8上,此时,称重机构4测量籽晶杆2、石墨托8及生长的碳化硅晶体的总重量,从而能够减少称重机构4的量程,提高测量的精度。旋转机构6固接于上段21,提拉机构3连接于旋转机构6,以通过旋转机构6连接于上段21。
[0104]
本实施例提供的碳化硅晶体生长的控制装置,控制器先控制籽晶100浸入助溶剂
200中,直至称重机构4的测量值降低至第一设定值,然后控制籽晶100远离助溶剂200移动,直至称重机构4的测量值由第一设定值增大至第二设定值。然后,在碳化硅晶体生长的过程中,根据称重机构4的测量值在设定时间段内的变化情况计算得到碳化硅晶体的生长直径,并根据该生长直径调节籽晶100移动的速度,而籽晶100移动速度发生变化则会反向影响碳化硅晶体的生长直径,进而实现在整个碳化硅晶体生长过程中动态维持碳化硅晶体生长直径在一个设定范围内,使得能够根据碳化硅晶体的生长情况控制籽晶100的移动速度,降低籽晶100移动过快或过慢的几率,进而保证生长的碳化硅晶体的品质。
[0105]
以上实施方式只是阐述了本发明的基本原理和特性,本发明不受上述实施方式限制,在不脱离本发明精神和范围的前提下,本发明还有各种变化和改变,这些变化和改变都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。