1.本实用新型涉及机械手技术领域,特别是指一种便于安装的工业机械手。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
3.目前市面上的机械手,大多不便于安装,在安装时,往往通过螺栓进行固定,不仅需要较多的人工,而且容易出现不牢固的情况,长时间的使用,螺栓容易脱落,同时不便于更换,因此,存在便利性差、安装效率低的问题。
技术实现要素:
4.本实用新型要解决的技术问题是提供一种便利性好于普通廊架的工业机械手的结构,另外本便于安装的工业机械手还具有安装效率高的特点。
5.为解决上述技术问题,本实用新型提供技术方案如下:
6.一种便于安装的工业机械手,包括安装台与机械手,其中:所述安装台用于安装机械手,所述机械手的顶部设置有锁板;
7.所述安装台包括壳体、驱动电机、螺纹杆、第一滑块与第二滑块,所述驱动电机设置在壳体的右侧,所述螺纹杆设置在壳体内,所述驱动电机的输出端与螺纹杆相连接,所述第一滑块、第二滑块设置在壳体内,且第一滑块、第二滑块套装在螺纹杆的外侧,所述第二滑块的底部设置有外夹持件,所述第一滑块的底部设置有内夹持件。
8.进一步的,所述螺纹杆的外螺纹分为四段,相邻两段的外螺纹的朝向相反,所述第二滑块设置在左端与右端的外螺纹上,所述第一滑块设置在中间两段的外螺纹上。
9.进一步的,所述壳体内设置有三个横板,所述螺纹杆通过横板分隔为四段。
10.进一步的,所述壳体的底部设置有导向柱,所述导向柱用于锁板的定位。
11.进一步的,所述壳体内设置有轴承,所述螺纹杆通过轴承与壳体活动连接。
12.进一步的,所述机械手包括转动组件、夹持组件、机械臂与夹板,所述转动组件与锁板相连接,所述夹持组件与转动组件相连接,所述机械臂的一端与夹持组件连接,所述机械臂的另一端与夹板相连接,所述转动组件用于转动夹持组件,所述夹持组件用于驱动机械臂转动。
13.本实用新型具有以下有益效果:
14.本实用新型的便于安装的工业机械手设置有外夹持件、内夹持件,使用时,先将锁板通过导向柱定位放置在壳体上,并使锁板与导向柱进行贴合,再通过驱动电机带动螺纹杆进行转动,带动内夹持件相互远离直到与锁板进行接触并对其固定,同时,带动第二滑块向螺纹杆的中部移动,外夹持件就会相互靠近,直到将机械手进行夹持固定,方便对机械手进行安装固定,而且便于拆卸,便利性好,提高了机械手的安装效率。
附图说明
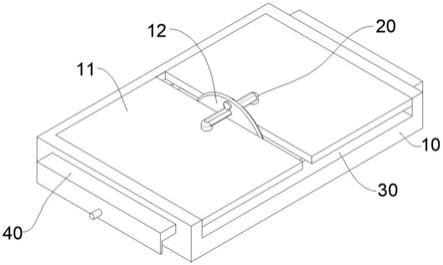
15.图1为本实用新型便于安装的工业机械手的结构示意图;
16.图2为本实用新型便于安装的工业机械手的正面结构示意图;
17.图3为本实用新型便于安装的工业机械手安装台的结构示意图。
18.图中:安装台1、壳体11、驱动电机12、螺纹杆13、第一滑块14、第二滑块15、外夹持件16、内夹持件17、导向柱18、横板19、机械手2、锁板21、转动组件22、夹持组件23、机械臂24、夹板25。
具体实施方式
19.为使本实用新型要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
20.本实用新型提供一种便于安装的工业机械手,如图1-3所示,包括安装台1与机械手2,其中:所述安装台1用于安装机械手2,所述机械手2的顶部设置有锁板21;
21.所述安装台1包括壳体11、驱动电机12、螺纹杆13、第一滑块14与第二滑块15,所述驱动电机12设置在壳体11的右侧,所述螺纹杆13设置在壳体11内,所述驱动电机12的输出端与螺纹杆13相连接,所述第一滑块14、第二滑块15设置在壳体11内,且第一滑块14、第二滑块15套装在螺纹杆13的外侧,所述第二滑块15的底部设置有外夹持件16,所述第一滑块14的底部设置有内夹持件17。
22.所述螺纹杆13的外螺纹分为四段,相邻两段的外螺纹的朝向相反,所述第二滑块15设置在左端与右端的外螺纹上,所述第一滑块14设置在中间两段的外螺纹上。
23.所述壳体11内设置有三个横板19,所述螺纹杆13通过横板19分隔为四段。
24.所述壳体11的底部设置有导向柱18,所述导向柱18用于锁板21的定位。
25.所述壳体11内设置有轴承,所述螺纹杆13通过轴承与壳体11活动连接。
26.所述机械手2包括转动组件22、夹持组件23、机械臂24与夹板25,所述转动组件22与锁板21相连接,所述夹持组件23与转动组件22相连接,所述机械臂24的一端与夹持组件23连接,所述机械臂24的另一端与夹板25相连接,所述转动组件22用于转动夹持组件23,所述夹持组件23用于驱动机械臂24转动。
27.本实用新型的原理说明如下:
28.本设计主要通过设置有外夹持件16、内夹持件17,能够对机械手2的外侧与内侧进行夹持固定,实现快速安装的效果,而且方便对机械手2进行更换,便利性更好,提高了安装效率,采用双夹持的结构,夹持效果更好。
29.使用时,先将锁板21通过导向柱18定位放置在壳体1上,并使锁板21与导向柱18进行贴合;
30.再通过驱动电机12带动螺纹杆13进行转动,带动两个第一滑块14向螺纹杆13的两端移动,内夹持件17相互远离直到与锁板21进行接触并对其固定,由于内夹持件17为鱼钩状,从而防止机械手2被拉出,起到固定的效果;
31.同时,螺纹杆13转动的过程中,两个第二滑块15也会向螺纹杆13的中部移动,外夹持件16就会相互靠近,直到将机械手2进行夹持固定;
32.采用双固定的结构,利用外夹持件16、内夹持件17的多点夹持,整个夹持结构更加
稳定可靠,固定效果更好,因此,方便对其进行安装与更换,提高了便利性与安装效率。
33.实施例1:
34.参见图1至图3,一种便于安装的工业机械手,包括安装台1与机械手2,其中:所述安装台1用于安装机械手2,所述机械手2的顶部设置有锁板21;所述安装台1包括壳体11、驱动电机12、螺纹杆13、第一滑块14与第二滑块15,所述驱动电机12设置在壳体11的右侧,所述螺纹杆13设置在壳体11内,所述驱动电机12的输出端与螺纹杆13相连接,所述第一滑块14、第二滑块15设置在壳体11内,且第一滑块14、第二滑块15套装在螺纹杆13的外侧,所述第二滑块15的底部设置有外夹持件16,所述第一滑块14的底部设置有内夹持件17。
35.实施例2:
36.基本内容同实施例1,不同之处在于:
37.参见图1至图3,所述螺纹杆13的外螺纹分为四段,相邻两段的外螺纹的朝向相反,所述第二滑块15设置在左端与右端的外螺纹上,所述第一滑块14设置在中间两段的外螺纹上;所述壳体11内设置有三个横板19,所述螺纹杆13通过横板19分隔为四段;所述壳体11的底部设置有导向柱18,所述导向柱18用于锁板21的定位;所述壳体11内设置有轴承,所述螺纹杆13通过轴承与壳体11活动连接;所述机械手2包括转动组件22、夹持组件23、机械臂24与夹板25,所述转动组件22与锁板21相连接,所述夹持组件23与转动组件22相连接,所述机械臂24的一端与夹持组件23连接,所述机械臂24的另一端与夹板25相连接,所述转动组件22用于转动夹持组件23,所述夹持组件23用于驱动机械臂24转动。
38.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。