1.本发明涉及一种用于自主驾驶车辆的控制设备。
2.本发明适用于自动车辆驾驶领域,尤其是涉及使车辆保持在其行车道中、调节车辆的速度和使车辆转向的功能。自动车辆驾驶的目的尤其在于提高运动的安全性和效率。这特别依赖于主动安全系统,其结合了适于在危急情况下修改车辆的动态行为的驾驶辅助系统,比如esp(电子稳定程序),该esp尤其通过制动动作来实现控制机动车辆轨迹的稳定性的功能。例如,当机动车辆以过高的纵向速度转弯时,可能难以遵循道路的曲率,并且机动车辆可能开始转向不足。然后,esp系统会自动进行干预,以使车辆保持在驾驶员期望的轨迹上。通常,如果车辆偏离驾驶员期望的轨迹,则esp系统发送发动机扭矩设定点信号和/或制动扭矩设定点信号以校正车辆的轨迹。
背景技术:
3.对于像esp系统这样的车辆控制系统,为了能够维持车辆的侧向稳定性,车辆的横摆角速度是一个需要知道的关键参数。
4.事实上,车辆的侧向稳定性在极端侧向操纵或不利驾驶条件下(例如,在雪或冰上,或在轮胎突然失压或甚至突然的侧风的情况下)的侧向操纵中对于乘客的安全是非常重要的。因此,使用车辆稳定性控制系统提高车辆在这样的不利条件下的侧向稳定性。为此,如前所述,横摆角速度是车辆稳定性控制系统需要知道的必要变量。该变量可以通过嵌入在车辆上的专用传感器来测量。该变量还可以使用比如侧向加速度计和车轮速度传感器等其他嵌入式传感器来估计。然后,车辆稳定性控制系统包括状态观测器,使得可以估计横摆角速度信息,该信息未被测量但对于控制来说是必需的。基于对车辆动力学建模得到的模型来构建状态观测器,该状态观测器接收车辆速度和侧向加速度以估计横摆角速度。
5.为了使车辆稳定性控制系统中实施的算法正确运行,系统作为输入接收的数据必须是正确的,特别是以便避免系统的任何故障和不稳定。现在,已经看到的是,这些数据中的包括横摆角速度在内的一定数量的数据是由观测器基于特定于车辆的动态模型计算出的,这意味着这些观测器应该始终正确运行,即,车辆的操作范围应该始终位于车辆模型有效的响应极限内。换言之,一直能够确定车辆是否仍然在模型的有效范围内运行并且从而确定控制系统是否仍然能够在自动驾驶模式下管理车辆是至关重要的。
6.因此,自动驾驶车辆需要适当的输入以便能够正确控制车辆,但也需要能够检测不再能保证控制系统的标称行为的危急情况。
7.以申请人的名义提交并且申请号为fr 1909681的尚未公布的专利申请针对自动驾驶车辆的应用,其中,车辆的控制系统被设计成用于对不稳定情况做出反应,在不稳定情况中,可能会达到车辆的物理极限。典型的示例是急转弯,考虑到转弯时轮胎与地面之间的抓地力所导致的物理极限,车辆可能会以明显过高的速度进入急转弯。该文件描述了一种系统,其中车辆模型能够预测在自主模式下车辆在位于其前方的所有路线上的未来位置,以便能够提前识别与违反车辆行驶极限的情况相对应的车辆未来位置,从而提早做出决策
以防止这些情况发生。
8.然而,虽然该系统有效地使得可以提早反应以防止车辆处于超出车辆行驶极限的不可控情况,但是该系统并非被设计成用于对突然和不可预测的车辆行驶条件变化做出实时反应,该变化可能会损害车辆在自动驾驶模式下的操作。特别地,在某些行驶情况下,车辆侧向稳定性控制系统所使用的车辆模型的响应与车辆的真实行为可能存在不匹配,这可能会导致车辆的状态高度不稳定。车辆在自动驾驶模式下有不再能够校正其轨迹的风险的这种情况例如可能在轮胎-道路接触的性质发生突然和不可预测的变化(例如,道路上存在可能会损害车轮抓地力的油、沙子或碎石)时、或甚至在突然爆胎时发生。在这些情况下,控制系统所使用的车辆模型可能不再有效,这代表潜在的危险,因为车辆稳定性控制系统的所有控制逻辑都依赖于该模型的使用。
9.此外,需要增强车辆在自动驾驶模式下在所有行驶条件下(包括在这些行驶条件下发生突然和不可预测的变化的所描述情况下)的侧向稳定性控制的鲁棒性。
10.还需要能够实时检测由于车辆行为与车辆模型的响应之间不匹配而导致不再能保证控制的稳定性的情况。
技术实现要素:
11.为此,本发明涉及一种自主驾驶或辅助驾驶机动车辆的控制设备,该控制设备包括:路线规划模块,其能够存储与规划轨迹有关的信息;该车辆的纵向运动控制器,其能够生成命令信号作为给加速致动器和制动致动器的输出;以及该车辆的侧向运动控制器,其能够生成命令信号作为给转向致动器的输出,使得该车辆在该车辆的辅助驾驶模式或自动驾驶模式下遵循该规划轨迹,所述侧向控制器的输出是基于对从该规划轨迹上的道路曲率获得的期望横摆角速度与基于该车辆的动态行为模型估计出的该车辆的当前横摆角速度之间的误差的最小化,该模型能够向所述侧向控制器提供基于该车辆的测得的纵向速度和测得的转向角度的横摆角速度估计值作为输入,其特征在于,该设备包括用于补偿该车辆的侧向动力学的模块,该模块能够在该模型与该车辆的实际动态行为之间存在偏差的情况下,根据该估计出的横摆角速度值与由嵌入式传感器测得的横摆角速度值之间的比较来动态校正该模型的参数,使得该模型提供给该侧向控制器的所述估计值得到即时校正。
12.有利地,该补偿模块适于通过考虑该估计出的横摆角速度值与该测得的横摆角速度值之间的差的自适应算法来估计补偿后的转向角度,该模型的输出基于作为该模型的输入提供的该补偿后转向角度进行校正。
13.有利地,该设备包括安全模块,该安全模块链接到用于补偿该车辆的侧向动力学的该模块的输出,所述安全模块适于在自动模式下基于校正后的模型的输出与该车辆的实际动态行为之间的差异来检测受损驾驶状态。
14.有利地,该校正后的模型能够提供施加在该车辆的前轮和后轮上的线性化侧向力的估计值,所述安全模块能够接收所述线性化侧向力,并将所述线性化侧向力与使用嵌入在该车辆上的传感器提供的数据计算出的侧向力进行比较。
15.优选地,该安全模块包括计算模块,该计算模块能够基于由这些嵌入式传感器测得的该车辆的侧向加速度值、转向角度值和横摆角速度值来计算施加在前轮和后轮上的侧向力。
16.优选地,所述安全模块包括比较器模块,该比较器模块能够建立这些线性化侧向力与这些计算出的侧向力之间的差,并且当所述差超过预定义的阈值时激活安全模式。
17.有利地,所述安全模块能够生成车辆安全命令信号给该纵向控制器和该横向控制器,当所述安全模式被激活时,所述安全命令信号优先于自动模式中的命令信号。
18.优选地,所述安全命令信号适于命令停止该车辆。
19.优选地,当所述安全模式被激活时,所述安全模块能够生成警报信号给该车辆的人机接口。
20.本发明还涉及一种机动车辆,其特征在于,该机动车辆包括如上所述的控制设备。
附图说明
21.通过阅读作为说明性而非限制性的示例并参考附图所给出的以下描述,本发明的其他特征和优点将更清楚地显现,在附图中:
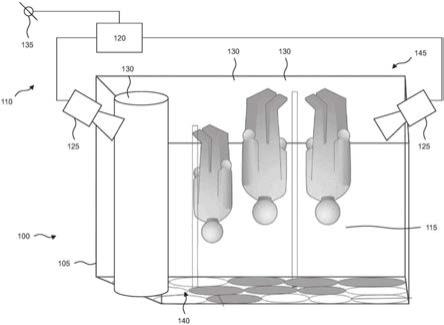
22.[图1]是展示了本发明的控制设备的架构的图;
[0023]
[图2]是示出在与倾斜道路相对应的行驶条件下由嵌入在车辆上的传感器测得的横摆角速度和使用车辆模型计算出的横摆角速度随时间变化的趋势的曲线图;
[0024]
[图3]是与图2类似的曲线图,但是在与湿滑道路相对应的不同行驶条件下;
[0025]
[图4]是展示了图1所示的用于补偿车辆侧向动力学的模块的操作的框图;
[0026]
[图5]是展示了图1中的安全模块的操作的框图。
具体实施方式
[0027]
参考图1,车辆的控制设备1包括自主驾驶控制模块2。该控制模块2包括第一控制器3,称为纵向控制器,其接收从嵌入在车辆上的速度传感器4获得的车辆当前速度值和从路线规划模块5获得的参考速度值作为输入,该路线规划模块存储与车辆的规划路线有关的信息,尤其是包括沿规划路线所规划的参考速度值。纵向控制器3适于生成发动机扭矩命令信号和制动命令信号6、7给车辆的对应加速致动器和制动致动器,以便使当前值与参考值之间的速度误差最小化。
[0028]
控制模块2还包括第二控制器8,称为侧向控制器,其接收根据从路线规划模块5得到的信息(包括道路的曲率)获得的期望横摆角速度值、从车辆的定位模块9得到的位置信息、以及与计算值10相对应的车辆当前横摆角速度值作为输入,该计算值基于车辆动态行为的模型,该模型能够提供横摆角速度的估计值,并且根据本发明,通过用于补偿车辆的侧向动力学的模块11来动态校正该估计值,该模块11被设计成用于补偿在特定行驶情况下车辆的标称模型的误差,如将在下文更详细地解释的。根据这些不同的输入,侧向控制器8适于生成转向角度命令信号12给车辆的转向致动器,从而作用于车辆的驱动轮的转向角度,以便使期望横摆角速度(从作为曲率的函数的道路线形信息获得)与从车辆的动态校正模型得到的当前横摆角速度之间的横摆误差最小化。
[0029]
补偿模块11的动作目的在于使得可以通过动态补偿车辆模型以考虑未在标称模型中建模的车辆侧向动力学来向侧向控制器8提供正确的横摆角速度值,这些未建模的车辆侧向动力学是由突然修改车辆行驶条件(比如车轮-地面接触的性质)的意外情况引起的,并且可能使车辆进入这样的操作范围,该范围位于车辆标称模型有效的响应极限之外。
[0030]
因此,车辆的侧向控制器8可以被提供适当补偿后的模型的输出,从而使得可以提高在所有行驶条件下(包括在这些意外条件下)提供的控制的鲁棒性。然而,对提供与实际值相对应的车辆横摆角速度的模型的补偿与施加在车辆上的侧向力的潜在饱和无关,侧向力仍然可能导致车辆的不受控状态。换言之,凭借对模型施加的补偿,可以向车辆的侧向控制器提供正确的横摆角速度值,但是车辆仍可能在自主模式下处于不再能够校正其轨迹的情况,因为车辆的物理行驶极限被超过。需要能够检测不再能确保车辆侧向稳定性的标称控制的这些危急情况,以便能够在这些情况下采取措施保证车辆乘客的安全。
[0031]
此外,在凭借由模型补偿模块11实施的校正横摆角速度的第一步骤向侧向控制器8提供正确的输入之后,由安全模块13实施的第二步骤包括检测车辆的物理驾驶极限是否被超过。当达到最大侧向承受能力时,车辆和用于控制的模型的行为不同,并且因此可以检测到模型所估计的侧向力与使用嵌入在车辆上的传感器测得的数据计算出的侧向力之间的偏差。因此,安全模块13接收车辆的侧向加速度值、转向角度值和横摆角速度值作为输入,这些值分别由嵌入式传感器14、15、16测量。安全模块13还被链接至补偿模块11。因此,安全模块13被设计成通过将在补偿模块11的输出处的从校正后的模型获得的线性化侧向力与使用由嵌入在车辆上的传感器测得的侧向加速度值、转向角度值和横摆角速度值计算出的侧向力进行比较来检测车辆的物理极限是否被超过。这种比较可以准确地识别侧向力的饱和度。安全模块13在输出处连接到车辆的人机接口17。因此,如果比较的结果超过给定阈值,则安全模块13命令在车辆的人机接口14上生成声音和/或视觉警报信号。安全模块13还连接到车辆的纵向控制器3和侧向控制器8。安全模块13能够生成安全命令信号给控制器,控制器作用于车辆的致动器,旨在例如通过停止车辆将车辆置于安全状态,以在驾驶员未响应警报信号的情况下确保乘客的安全。
[0032]
总之,车辆的控制设备1一方面适于经由补偿模块11通过校正车辆模型的响应与车辆的实际行为之间的不匹配、基于车辆模型来提供横摆角速度和线性化侧向力的正确估计值,另一方面适于经由安全模块13检测车辆自动模式下的受损驾驶状态(这些状态对应于突然发生的行驶情况,在这些情况下,不再能保证控制的稳定性),以便应用预防性安全程序,从而使得可以保护车辆,通常是停止车辆,该预防性安全程序优先于自动模式中的标称驾驶命令。
[0033]
现在接下来是补偿模块11和安全模块13的相应操作的更详细的描述。
[0034]
补偿模块11一方面适于为侧向控制器8提供适当的横摆角速度,另一方面适于提供旨在安全模块13中进行比较的线性化侧向力。这里的目标是通过校正标称模型与实际车辆之间的差异,为侧向控制器和安全模块提供正确的输入。
[0035]
将使用本身众所周知的自行车模型,该模型使得可以根据横摆和漂移来描述车辆的动态行为。因此,车辆的横摆角速度和侧向动力学可以通过以下微分方程来描述:
[0036][0037]
m[ay]=ffcos(s) fr gsin(θ)cos(φ)
[0038]
其中,a、b分别为车辆重心到前轮轴线和后轮轴线的距离,m为车辆重量,并且lz为绕竖直轴线z的转动惯量。ψ,θ,φ分别为车辆的横摆角度、车辆的倾斜角度和车辆的俯仰角度。mz、ay和δ分别是由专用致动器施加的横摆力矩、侧向加速度和转向角度。ff、fr是由于车轮/地面接触而施加在车辆前轮和后轮上并允许车辆转弯的前侧向力和后侧向力。它们
取决于车辆的转向角度δ、偏滑角度和运动速度。
[0039]
然而,为了控制自主车辆的侧向运动,必须简化上述模型,因为侧向控制器的设计和运动的预测使用线性车辆模型,并且仅依赖于可利用廉价传感器获得的信号。所使用的简化通过以下方式来获得:首先假设当车辆在施加在前轮和后轮上的力的线性范围内使用时施加在前轮和后轮上的侧向力与侧向偏滑角度成比例。此外,假设小转向角度被定义成使得:cos(δ)=1并且sin(δ)=δ。
[0040]
令β为绕车辆重心测得的车辆总速度矢量与车辆纵向方向之间的角度。以下适用:
[0041]
即,
[0042]
其中,vx和vy是沿车辆纵轴和横轴的速度。
[0043]
如前所述,车辆的横摆角速度是自主车辆侧向控制的关键变量。因此,必须准确地知道该变量。
[0044]
图2和图3是示出在两种不同的行驶条件下(分别在倾斜道路(图2)和湿滑道路上)测得的转向角度δ的情况下、由嵌入在车辆上的传感器测得的横摆角速度和使用上述模型计算出的横摆角速度随时间变化的趋势的曲线图,横摆角速度以每秒度数为单位。图2中所示的测得的横摆角速度值与计算出的横摆角速度值之间的偏差是由于所使用的模型没有考虑坡度或倾斜角度的影响导致的。在图3中,数据是在平坦但湿滑的道路上采集的,该图中的偏差是由侧向力的饱和引起的。这种偏差在图3中的第45秒周围特别明显。展现测得的横摆角速度值与计算出的横摆角速度值之间的偏差的这两个示例清楚地展示了需要补偿车辆模型,以考虑自主车辆中的所有潜在行驶情况,从而使得可以提高自主车辆的鲁棒性及其操作安全。
[0045]
为了补偿这种偏差,提供了用于补偿车辆侧向动力学的模块11,以便在与车辆的实际行为出现偏差的这些特定行驶情况下校正车辆模型,并因此向侧向控制器提供正确的横摆角速度值。
[0046]
图4是展示了补偿模块11的操作的框图,该补偿模块使得能够在所有行驶条件下在车辆模型m的输出处获得横摆角速度的准确估计值。
[0047]
用于补偿车辆侧向动力学的模块11包括补偿器110,该补偿器在模型m上循环,并且适于修改测得的转向角度δ以使由嵌入在车辆上的横摆角速度传感器16测得的横摆角速度值与基于车辆标称模型m计算出的横摆角速度值之间的偏差最小化。
[0048]
更具体地,补偿模块11使用测得的横摆角速度从车辆的嵌入式速度传感器4得到的车辆的运动速度、以及关于道路线形的信息(坡度、倾斜度)作为输入,该信息是由用于存储与对应于规划轨迹的道路线形有关的信息的装置18提供的。横摆角速度最初是通过优先考虑道路坡度和倾斜度信息、基于车辆的纵向速度数据和例如由车轮转向角度传感器测得的转向角度、使用模型m来计算的。
[0049]
为此,车辆模型m的参数包括前轮侧向刚度cf、后轮侧向刚度cr、车辆重心到前轮的纵向距离a、车辆重心到后轮的纵向距离b、车辆重量、以及车辆的横摆转动惯量lz。
[0050]
模型补偿器110考虑测得的横摆角速度和使用模型计算出的横摆角速度
以便具体地基于这些相应角速度之间的比较来提供补偿后的转向角度δ
补偿
,从而使这两个角速度之间的偏差最小化。为此,模块110实施自适应参数算法,以通过如下计算补偿转向角度δ
补偿
来获得尚未建模的车辆动力学:
[0051][0052]
其中,c(q)是自适应控制器,其基于使用参数自适应算法(paa)在线计算出的自适应参数q。
[0053]
然后,将补偿后的转向角度提供给车辆模型m,使得使用该模型计算出的横摆角速度朝向测得的横摆角速度收敛。因此,模型的输出通过使用补偿模块11得到实时校正,并且侧向控制器8因此接收到正确的横摆角速度数据作为输入。
[0054]
一旦横摆角速度得到补偿,就可以估计施加在车辆前轮和后轮上的线性化侧向力。这些线性化侧向力(分别是前ff_l和后fr_l)估计如下:
[0055][0056]
因此,通过模型补偿器110循环的车辆模型m使得可以具有线性化系统。
[0057]
这些适当估计的线性化侧向力由用于补偿车辆侧向动力学的模块11作为输入提供给安全模块13,在安全模块中将与使用车辆的嵌入式传感器计算出的侧向力进行比较。如先前所解释的,该比较的目的是检测在车辆模型与车辆的实际行为之间存在偏差的情况下车辆的物理行驶极限是否被超过。
[0058]
图5是展示了使得可以执行该比较的安全模块13的操作的框图。
[0059]
安全模块13包括计算模块130,该计算模块能够基于嵌入式传感器(分别为侧向加速度测量传感器14、转向角度测量传感器15和横摆角速度测量传感器16)测得的车辆侧向加速度值、转向角度值和横摆角速度值来计算施加在前轮和后轮上的侧向力。这些侧向力(分别是前ff和后fr)估计如下:
[0060][0061]
其中,ay对应于测得的横向加速度。
[0062]
由计算模块130基于传感器数据计算出的侧向力和补偿模块11估计出的线性化侧向力作为输入提供给安全模块13的比较器模块131,该比较器模块能够在这些相应的计算出的侧向力与估计出的侧向力之间进行比较。
[0063]
更具体地,比较器模块131建立线性化侧向力与计算出的侧向力之间的差,并将该差与预定义阈值ε进行比较。当该差高于预定义阈值时,比较器模块由此推断出在车辆的自动模式下受损驾驶达到不再能保证控制的稳定性的程度。此外,预定阈值ε被超过会导致激活安全模式。该安全模式一方面包括生成车辆的人机接口17上的警报信号132,目的在于通知驾驶员车辆的不可控状态。同时,阈值被超过会触发生成安全命令信号133并将其发送到控制器,控制器作用于车辆的致动器、尤其是方向盘致动器和制动致动器,以使车辆进入安全状态,包括在驾驶员没有反应的情况下停止车辆。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。