1.本实用新型涉及大地高程测量技术领域,具体是涉及一种用于大地测量的高程测量装置。
背景技术:
2.在工程建设过程中,高程测量任务量极大且尤为重要,任何工程的优质功能缺少了精准的高程测量都将无法实现。目前,工程建设中高程测量最普遍的方法有水准法、三角高程法、gps高程法等。
3.水准法存在以下不足:工作效率低、需耗费大量的人力和时间、操作人员业务水平对测量精准度的影响较大,测量过程中需严格控制前后视距长度,累计误差较大。
4.三角高程法是通过观测两点间的水平距离和天顶距(或高度角)求定两点间高差的方法。它观测方法简单,受地形条件限制小,也是测定高程的基本方法,虽无需进行每站高差的传递,但每个测点仍需不少于2人进行人工测量,并需提前进行高程控制测量,通过控制点架设仪器才可进行碎步高程点位测量。
5.现有技术的高程测量装置不能由单人操作进行高程测量,测量不方便、工作量大且测量精度低。
技术实现要素:
6.本实用新型解决的技术问题是:现有的高程测量装置不能由单人操作,使用不方便,且测量精度低。
7.本实用新型的技术方案是:一种用于大地测量的高程测量装置,包括搭载装置,固定设置在所述搭载装置上的大地高程测量装置;
8.所述大地高程测量装置包括固定在搭载装置上的旋转机构,设置在所述旋转机构上的测距模块,以及设置在所述旋转机构上的发射装置;
9.所述旋转机构包括固定在搭载装置上的圆形基盘,活动设置在所述圆形基盘中心的中心转轴,设置在所述中心转轴上的旋转盘,以及通过中心转轴驱动旋转盘旋转的第一动力电机;
10.所述旋转盘外圈上均匀设置有多个与旋转平面垂直的测距模块安装台;
11.所述测距模块包括多个对应设置在测距模块安装台上的半球形保护罩,设置在所述半球形保护罩上的弧形轨道,安装在半球形保护罩内且与弧形轨道活动连接的激光测距仪,用于驱动激光测距仪在弧形轨道上转动的第二动力电机,以及设置在测距模块安装台下端的反射激光采集器;
12.所述发射装置包括设置在旋转盘上的全反射棱镜发射管,设置在所述旋转盘上且与全反射棱镜发射管连接的供给匣;
13.所述供给匣内装有全反射棱镜球。
14.进一步地,所述供给匣包括固定在旋转盘上的环形存储腔,设置在所述环形存储
腔一端与全反射棱镜发射管连通的连接口,活动设置在所述环形存储腔内的推板,以及设置在所述推板、环形存储腔另一端之间的弹性元件;
15.所述全反射棱镜球装填在推板、连接口之间;
16.全反射棱镜球通过供给匣进入全反射棱镜发射管并被发射出去;通过全反射棱镜球能够大大提高反射激光采集器的激光采集强度,从而有效提高测量精度。
17.进一步地,所述全反射棱镜发射管为弹性发射器;
18.所述弹性发射器包括发射管,设置在发射管内的发射弹簧、电磁开关,以及用于为发射弹簧储能的电推缸;通过电推缸使发射弹簧储能,在储能完成后将全反射棱镜球利用弹力发射出去;提高检测电的激光反射强度,保证测量精度。
19.进一步地,所述激光测距仪能够在弧形轨道转动的角度为180
°
;在与旋转平面垂直的测距模块安装台上设置180
°
的弧形轨道,能够使激光测距仪垂直向地面发射激光,便于快速直接测量垂直高度。
20.进一步地,所述弧形轨道上设置有转角传感器;转角传感器的设置能够检测激光测距仪的转动角度,结合激光测距仪测量的直线距离,利用三角函数计算高度。
21.优选的,所述搭载装置为伸缩支架,可根据需要调整高度。
22.更优的,所述搭载装置为无人飞行器;无人飞行器的设置能够有效提高整个测量装置的工作范围,在一定区域内能够快速完成整个区域的高程测量,具有较高的工作效率。
23.本实用新型的有益效果是:本实用新型提供了一种利用激光测距仪进行高程测量的测量装置,相较于现有技术的高程测量设备,本装置能够满足单人操作进行高程测量的需求,具有操作简便,节省人力,快速测量的特点。
24.本装置通过旋转机构在旋转机构上设置多个测距模块能够向四周发射连续的激光,通过反射激光采集器采集反射激光计算测量距离;结合三角函数完成高度测量,具有测量精度高的特点。
25.本发明通过发射装置发射全反射棱镜球能够大大提高测量点的激光反射强度,有效保证反射激光能够被反射激光采集器接收,从而得到较高精准的直线距离。
附图说明
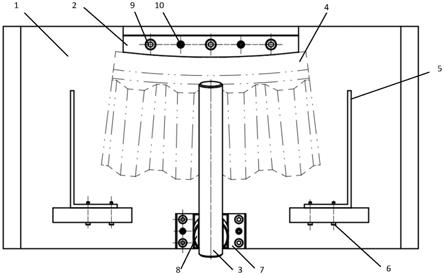
26.图1是本实用新型实施例1整体的结构示意图;
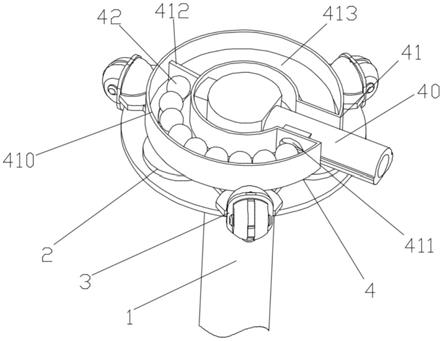
27.图2是本实用新型实施例1旋转机构、测距模块的结构示意图;
28.图3是本实用新型实施例1全反射棱镜发射管的结构示意图;
29.其中,1-搭载装置、2-旋转机构、3-测距模块、4-发射装置、20-圆形基盘、21-中心转轴、22-旋转盘、23-第一动力电机、24-测距模块安装台、30-半球形保护罩、31-弧形轨道、32-激光测距仪、33-第二动力电机、34-反射激光采集器、40-全反射棱镜发射管、41-供给匣、42-全反射棱镜球、410-环形存储腔、411-连接口、412-推板、413-弹性元件、400-发射管、401-发射弹簧、402-电磁开关、403-电推缸。
具体实施方式
30.实施例1
31.一种用于大地测量的高程测量装置,包括搭载装置1,固定设置在所述搭载装置1
上的大地高程测量装置;
32.所述大地高程测量装置包括固定在搭载装置1上的旋转机构2,设置在所述旋转机构2上的测距模块3,以及设置在所述旋转机构2上的发射装置4;
33.所述旋转机构2包括固定在搭载装置1上的圆形基盘20,活动设置在所述圆形基盘20中心的中心转轴21,设置在所述中心转轴21上的旋转盘22,以及通过中心转轴21驱动旋转盘22旋转的第一动力电机23;
34.所述旋转盘22外圈上均匀设置有3个与旋转平面垂直的测距模块安装台24;
35.所述测距模块3包括3个对应设置在测距模块安装台24上的半球形保护罩30,设置在所述半球形保护罩30上的弧形轨道31,安装在半球形保护罩30内且与弧形轨道31活动连接的激光测距仪32,用于驱动激光测距仪32在弧形轨道31上转动的第二动力电机33,以及设置在测距模块安装台24下端的反射激光采集器34;
36.所述发射装置4包括设置在旋转盘22上的全反射棱镜发射管40,设置在所述旋转盘22上且与全反射棱镜发射管40连接的供给匣41;
37.所述供给匣41内装有全反射棱镜球42;
38.所述搭载装置1为伸缩支架。
39.所述供给匣41包括固定在旋转盘22上的环形存储腔410,设置在所述环形存储腔410一端与全反射棱镜发射管40连通的连接口411,活动设置在所述环形存储腔410内的推板412,以及设置在所述推板412、环形存储腔410另一端之间的弹性元件413;
40.所述全反射棱镜球42装填在推板412、连接口411之间。
41.所述全反射棱镜发射管40为弹性发射器;
42.所述弹性发射器包括发射管400,设置在发射管400内的发射弹簧401、电磁开关402,以及用于为发射弹簧401储能的电推缸403。
43.所述激光测距仪32能够在弧形轨道31转动的角度为180
°
。
44.所述弧形轨道31上设置有转角传感器。
45.其中本装置还包括plc控制器。
46.其中,plc控制器、转角传感器、激光测距仪32、电推缸403、电磁开关402、伸缩支架、反射激光采集器34、第二动力电机33、第一动力电机23均采用现有产品,且具体的产品型号本领域内技术人员可根据需要进行选择。
47.本装置的使用方法及测量原理:
48.将伸缩支架固定在地面,第二动力电机33驱动激光测距仪32在弧形轨道31上转动,转角传感器计算转动角度;
49.弹性发射器向检测地点发射全反射棱镜球42,然后激光测距仪32向检测地点发射激光,反射激光采集器34接收到反射激光,计算得到直线距离,利用三角函数计算得到测量地点高度。
50.实施例2
51.与实施例1不同的是,所述搭载装置1为无人飞行器;其中无人飞行器采用现有产品,且具体的产品型号本领域内技术人员可根据需要进行选择。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。