1.本实用新型涉及送餐机器人领域,尤其涉及一种分桌送餐机器人以及用于上述分桌送餐机器人的点餐系统。
背景技术:
2.伴随智能餐厅的日渐普及及用工成本的上升,送餐机器人正越多越来越餐厅的喜欢,现有的送餐机器人多采用巡线机器人,也即在餐厅规划好路线,机器人按预设路线将菜品送至指定餐桌,部分更加智能的送餐机器人能够依据预设地图及摄像头的辅助作用主动寻找到目标餐桌已完成送餐。
3.中国专利文献公开号cn106338995a公开了一种送餐机器人及其送餐方法所述送餐机器人包括送餐托盘、主控制器、发声装置、运动控制装置及电源模块。所述送餐托盘设有二个以上餐品感应器,每一所述餐品感应器对应感应一个餐品,当所述餐品在所述送餐托盘内的存在状态发生改变时,其对应的所述餐品感应器发出一感应信号;所述主控制器用于接收并根据所述感应信号判断所述该餐品是否送错;发声装置连接所述主控制器,所述发声装置用于客人取餐错误时进行语音提示,防止取餐错误;运动控制模块设于所述机器人底部,用于控制机器人的运动状态;电源模块设于所述机器人体内,所述电源模块由电源存储和充放电电路组成,用于供电。上述送餐机器人在菜品被取走后,能够进行语音提示,但其并不满足实际的送餐机器人的使用需求,机器人无法将服务员放置在机器人上的菜品与桌号进行关联,这就使得机器人很难同时送几桌的菜,往往只能一次去一个客户送餐后回到初始位置,而且服务员每次上餐后都需要手动选择餐桌,否则送餐机器人不能依据菜品判断该去哪个餐桌。另外,当客户拿错菜品后,送餐机器人也只会按既定路线完成工作。
技术实现要素:
4.为了克服现有技术的缺陷,本实用新型所要解决的技术问题在于提出一种分桌送餐机器人,十分智能其能够将菜品和桌号关联,通过识别桌号贴纸就能够自动获知菜品与餐桌关联信息,并自动找寻目标餐桌。
5.为达此目的,本实用新型采用以下技术方案:
6.本实用新型提供的一种分桌送餐机器人,包括一个或者多个用于识别桌号贴纸的第一识别器、至少一层的托盘及两条支撑臂、至少一个的用于识别所述托盘的第二识别器以及控制电脑,每个所述托盘的两侧边分别与两条所述支撑臂固定连接,一个或者多个所述第一识别器位于所述支撑臂上或者所述托盘上,所述第二识别器位于相应所述托盘的侧壁上或者位于所述托盘上方的所述支撑臂上,一个或者多个的所述第一识别器与所述控制电脑电连接,至少一个的所述第二识别器与所述控制电脑电连接。
7.本实用新型进一步地技术方案在于,所述第二识别器配置为红外阵列,所述红外阵列固定在相应的所述托盘的侧壁上。
8.本实用新型进一步地技术方案在于,所述第二识别器配置为第一摄像头,所述第一摄像头固定在相应的所述托盘上方的所述支撑臂的内壁上。
9.本实用新型进一步地技术方案在于,所述第一识别器包括用于粘接所述桌号贴纸的粘贴位及对所述粘贴位进行拍摄的第二摄像头,所述第二摄像头位于所述粘贴位的上方。
10.本实用新型进一步地技术方案在于,所述支撑臂的外壁上设置有固定框,所述粘贴位位于所述固定框的底板上,所述固定框的顶部设置有与所述底板平行的顶板,所述第二摄像头固定在所述顶板上。
11.本实用新型进一步地技术方案在于,所述桌号贴纸的一面设置有纳米双面胶。
12.本实用新型进一步地技术方案在于,所述第一识别器设置为用于扫描所述桌号贴纸的红外扫描器,一个或者多个的所述红外扫描器嵌入所述支撑臂内,一个或者多个的所述红外扫描器的扫描口位于所述支撑臂的外壁上。
13.本实用新型进一步地技术方案在于,还包括语音播放器,所述语音播放器与所述控制电脑电连接,所述语音播放器与所述控制电脑电连接。
14.本实用新型进一步地技术方案在于,还包括显示屏,所述显示屏与所述控制电脑电连接。
15.本实用新型还提供的一种用于上述的分桌送餐机器人的点餐系统,包括:
16.用于运营所述点餐系统的控制台主机及至少一辆的所述分桌送餐机器人,所述桌号贴纸为rfid标签,所述分桌送餐机器人的第一识别器配置为解读器,所述解读器与所述控制电脑电连接,所述控制电脑与所述控制台主机网络连接。
17.本实用新型进一步地技术方案在于,还包括位于一个或者多个餐桌上的平板电脑,所述控制电脑与所述控制台主机网络连接,所述平板电脑与所述控制台主机网络连接。
18.本实用新型的有益效果为:
19.本实用新型提供的分桌送餐机器人,设置有用于识别桌号贴纸的第一识别器以及至少一个的用于识别托盘的第二识别器,通过第一识别器可以使得送餐机器人获知放入菜品的桌号,通过第二识别器可以获知哪些菜品放入在哪几层托盘的状态,将二者的信息相互关联,就能够实现如下场景,扫描某个桌号贴纸就能够获知餐桌编号,当获知餐桌编号后,放入一桌菜,能够通过托盘的状态获知这个餐桌编号对应的是哪几个菜。当机器人运动到客户餐桌时,可以通过语音播放器提示客户取相应层的菜品,当客户拿错层时发出错误提示。
附图说明
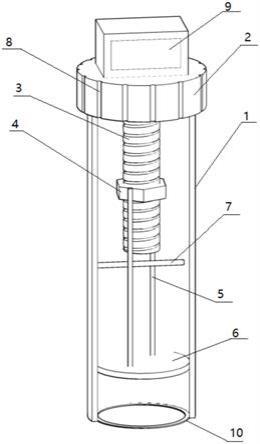
20.图1是本实用新型实施例一中提供的分桌送餐机器人的侧视图;
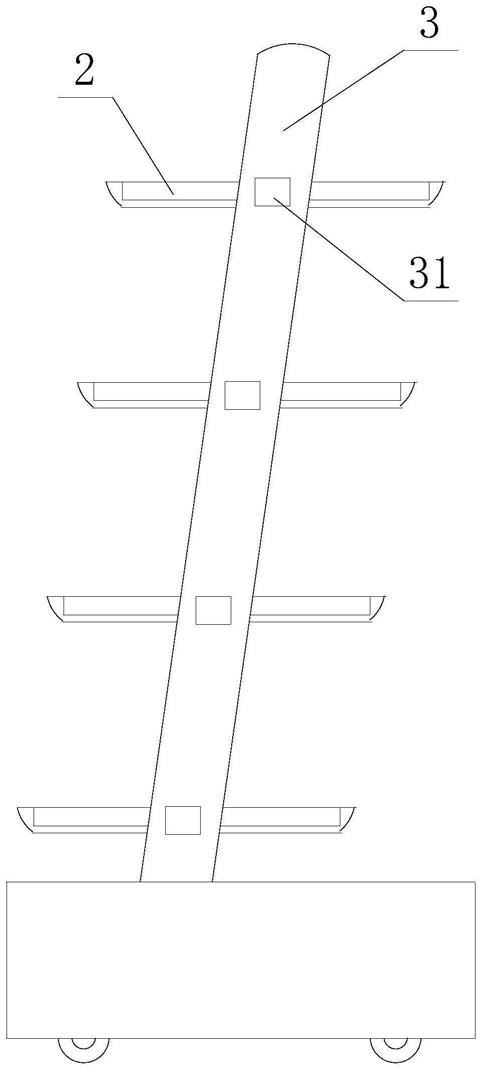
21.图2是本实用新型实施例一中提供的分桌送餐机器人的正视图;
22.图3是本实用新型实施例一中提供的分桌送餐机器人的a局部示意图;
23.图4是本实用新型实施例二中提供的托盘的俯视图;
24.图5是本实用新型实施例三中提供的分桌送餐机器人的侧视图;
25.图6是本实用新型实施例四中提供的分桌送餐机器人的侧视图;
26.图7是本实用新型实施例五中提供的分桌送餐机器人的侧视图;
27.图8是本实用新型实施例五中提供的分桌送餐机器人的点餐系统的示意图。
28.图中:
29.2、托盘;3、支撑臂;4、控制电脑;51、红外阵列;52、第一摄像头;11、粘贴位;12、第二摄像头;31、固定框;311、底板;312、顶板;13、红外扫描器;32、扫描口;6、语音播放器;7、显示屏;8、控制台主机;9、平板电脑;10、解读器。
具体实施方式
30.下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
31.实施例一
32.如图1至3所示,本实施例中提供的分桌送餐机器人包括一个或者多个用于识别桌号贴纸的第一识别器、至少一层的托盘2及两条支撑臂3、至少一个的用于识别托盘的第二识别器以及控制电脑4,每个托盘2的两侧边分别与两条支撑臂3固定连接,一个或者多个第一识别器位于支撑臂3的外壁上,第二识别器位于相应托盘2的侧壁上或者位于托盘2上方的所述支撑臂3的内壁上,一个或者多个的第一识别器与控制电脑4电连接,至少一个的第二识别器与控制电脑4电连接。具体使用时,第一识别器的数量可以为一个或者每层托盘2旁的支撑臂3的外壁上均设置有一个,当第一识别器的数量为一个时,要求服务员每扫描一次桌号贴纸后,需要将该桌号贴纸对应的所有菜品都放入至相应托盘2内,才能进行下一个桌号贴纸的扫码,例如:送餐机器人上有四层托盘2,每个托盘2,每个托盘2可以放2个菜品,假如10号餐桌一共有6菜品需要放到餐桌上,服务员扫描桌号贴纸后,控制电脑4获知现在需要上10餐桌的菜,服务员把6道菜品放在三层托盘2上,此时第二识别器能检测到哪三层放置有菜品,就能够将这三层的6道菜品与10号餐桌相关联,随后服务员按下分桌送餐机器人的开始键后分桌送餐机器人依据第一识别器的扫描结果自动运动到10 号餐桌,到了10号餐桌就能够报出哪三层放置有菜品为10号餐桌的菜品,从而达到引导客户取餐的目的,同时当客户取错时,也能够进行相应的提示。当第一识别器的数量为多个时,通常要求每层托盘2旁的支撑臂3的外壁上均设置有一个第一识别器,这种方案就降低了对服务员要求,只要求服务员把同一桌的菜放在同一层即可,例如:送餐机器人上有四层托盘2,每个托盘2,每个托盘2可以放2个菜品,假如10号餐桌一共有6菜品需要放到餐桌上,服务员在第一层托盘2旁的第一识别器处进行桌号贴纸的扫描后,控制电脑4获知现在需要上10餐桌的菜,服务员把2道菜品放在第一层托盘2上,此时第二识别器能检测到第一层放置有菜品,就能够将第一层的2道菜品与10号餐桌相关联,扫描第二层及第三层托盘2旁的第一识别器重复上述操作,完成每一层菜品与10号餐桌的关联,这种方式即使是在送餐机器人突然插入9号餐桌的菜品也行,只需要保证每一层放置同一桌的菜,从而降低了对服务员放菜要求。通过上述记载可知,本实施例中提供的分桌送餐机器人通过第一识别器可以使得送餐机器人获知放入菜品的桌号,通过第二识别器可以获知哪些菜品放入在哪几层餐盘的状态,将二者的信息相互关联,就能够实现如下场景,扫描某个桌号贴纸就能够获知餐桌编号,当获知餐桌编号后,放入一桌菜,能够通过托盘的状态获知这个餐桌编号对应的是哪几个菜。当机器人运动到客户餐桌时,可以通过语音播放器6提示客户去相应层的菜品,当客户拿错层时发出错误提示,服务员需要做的仅仅是让第一识别器检测到桌号贴纸的信息即可,这样就大幅提升了分桌送餐机器人的智能化及使用体验。此外,本技术提供的分桌送餐机器人还能
够将餐桌编号、菜品名字共同编码后,生成每道菜品唯一身份标识码,第一识别器扫描某道菜品的唯一身份标识码,就能够获知菜品的桌号、菜名、制作时间等信息,当这道菜放入第二识别器后,就能够将菜品在分桌送餐机器人位置信息进行关联,控制电脑4就能够获知菜品的身份信息及位置信息,后续通过平板电脑演示菜品的用餐指引及制造工艺提供便捷性。
33.为了便于第二识别器对桌号贴纸进行检测,第一识别器包括用于粘接桌号贴纸的粘贴位11及对粘贴位11进行拍摄的第二摄像头12,第二摄像头12位于粘贴位11的上方,具体使用时,将桌号贴纸粘贴在粘贴位11,通过第二摄像头 12自主识别方式拍摄粘贴位11上的桌号贴纸或者扫描桌号贴纸的二维码或者条形码获取桌号贴纸对应的餐桌编号,从而让控制电脑4获知接下来要上哪一桌的菜。进一步地,支撑臂3的外壁上设置有固定框31,粘贴位11位于固定框 31的底板311上,固定框31的顶部设置有与底板311平行的顶板312,第二摄像头12固定在顶板312上。底板311有一定的斜度以方便桌号贴纸粘贴,具体使用时,服务员仅需将桌号贴纸粘贴在底板311上的粘贴位11,第二摄像头12 就能够捕捉到桌号贴纸上记载的餐桌编号,从而获知要上哪一桌的菜。进一步优选地,为了方便桌号贴纸的粘贴,桌号贴纸的一面设置有纳米双面胶,纳米双面胶具有粘连及撕掉不留痕的特点,使得粘贴位11能够重复多次使用而不会因为胶液滞留而增厚。
34.进一步地,第二识别器配置为第一摄像头52,第一摄像头52固定在相应的托盘2上方的支撑臂3的内壁上。第一摄像头52能够对托盘2的盛物区进行拍摄,通过拍摄就能够检测是否有菜品放置在菜品内,从而实现控制电脑4将餐桌编号与相应层放置菜品进行关联的目的。
35.为了服务员及客户获知分桌送餐机器人运行状态,进一步地,分桌送餐机器人还包括语音播放器6,语音播放器6与控制电脑4电连接,语音播放器6优选地设置在控制电脑4内。当餐桌编号与相应层放置菜品关联成功后,可以提示已经关联成功,当分桌送餐机器人成功获知餐桌编号时,可以提醒服务员扫描成功,当分桌送餐机器人运动到客户处时,也可以向客户播报菜品。
36.本实施例中提供的分桌送餐机器人包括还包括显示屏7,显示屏7与控制电脑4电连接,显示屏7同样可以显示关联状态,也能够与服务员或者客户进行人机交互,进一步丰富分桌送餐机器人的功能。
37.实施例二
38.如图4所示,本实施例中提供的分桌送餐机器人,包括一个或者多个用于识别桌号贴纸的第一识别器、至少一层的托盘2及两条支撑臂3、至少一个的用于识别托盘的第二识别器以及控制电脑4,每个托盘2的两侧边分别与两条支撑臂3固定连接,一个或者多个第一识别器位于支撑臂3的外壁上,第二识别器位于相应托盘2的侧壁上或者位于托盘2上方的所述支撑臂3的内壁上,一个或者多个的第一识别器与控制电脑4电连接,至少一个的第二识别器与控制电脑4电连接。实施例二与实施例一的不同之处在于:
39.第二识别器配置为红外阵列51,红外阵列51固定在相应的托盘2的侧壁上。通常红外阵列51包括若干发射器及若干与发射器对应的接收器,若干发射器位于托盘2的一侧壁上,若干接收器位于托盘2的另一侧壁上,当菜品放入时,发射器的射线被阻挡,从而使得红外阵列51获知到是否有菜品放入至托盘2内。红外阵列51不仅具有成本较低的优势,而且检
测精度高抗干扰性强。
40.实施例三
41.如图5所示,本实施例中提供的分桌送餐机器人,包括一个或者多个用于识别桌号贴纸的第一识别器、至少一层的托盘2及两条支撑臂3、至少一个的用于识别托盘的第二识别器以及控制电脑4,每个托盘2的两侧边分别与两条支撑臂3固定连接,一个或者多个第一识别器位于支撑臂3的外壁上,第二识别器位于相应托盘2的侧壁上或者位于托盘2上方的所述支撑臂3的内壁上,一个或者多个的第一识别器与控制电脑4电连接,至少一个的第二识别器与控制电脑4电连接。实施例三与实施例一及实施例二的不同之处在于:
42.第一识别器设置为用于扫描桌号贴纸的红外扫描器13,一个或者多个的红外扫描器13嵌入支撑臂3内,一个或者多个的红外扫描器13的扫描口32位于支撑臂3的外壁上。红外扫描器13能够扫描桌号贴纸的二维码或者条形码获取桌号贴纸对应的餐桌编号,目前这种扫描技术十分成熟且准确率高。
43.实施例四
44.如图6所示,本实施例中提供的分桌送餐机器人,包括一个或者多个用于识别桌号贴纸的第一识别器、至少一层的托盘2及两条支撑臂3、至少一个的用于识别托盘的第二识别器以及控制电脑4,每个托盘2的两侧边分别与两条支撑臂3固定连接,一个或者多个第一识别器位于支撑臂3的外壁上,第二识别器位于相应托盘2的侧壁上或者位于托盘2上方的所述支撑臂3的内壁上,一个或者多个的第一识别器与控制电脑4电连接,至少一个的第二识别器与控制电脑4电连接。实施例四与实施例一至实施例三的不同之处在于:
45.一个或者多个第一识别器位于托盘2上,具体的,如图6所示,以第一识别器配置为第二摄像头12为例,第二摄像头12位于相应托盘2的边缘处,服务员将桌号贴纸对准第二摄像头12进行拍摄,以完成扫描桌号贴纸的工作,同样第一识别器设置为用于扫描桌号贴纸的红外扫描器13也能够安装在托盘2 上,由此可见第一识别器也是可以固定在托盘2上,理论上位于托盘2的上部或者底部均可,但在实际运用中还需要考虑何处扫码方便,故通常设置在托盘2 边缘处,以方便伸手将桌号贴纸放置在第二摄像头12处进行扫描。
46.实施例五
47.如图7及图8所示,本实用新型还提供一种用于上述分桌送餐机器人的点餐系统,包括用于运营点餐系统的控制台主机8、至少一辆的分桌送餐机器人,桌号贴纸为rfid标签,分桌送餐机器人的第一识别器配置为解读器10,解读器10位于支撑臂3的内壁上,解读器10与控制电脑4电连接,控制电脑4与控制台主机8网络连接,当通过桌号贴纸在处于解读器10的感应范围时,解读器10就能够读取菜品对应的餐桌编号,控制电脑4将该餐桌编号上传至控制台主机8,从而实现餐桌编号与菜品的绑定,类似实施例一至三中的第一识别器。进一步优选地,本实用新型还提供一种用于上述分桌送餐机器人的点餐系统还包括位于一个或者多个餐桌上的平板电脑9,控制电脑4与控制台主机8网络连接,平板电脑9与控制台主机8网络连接。当分桌送餐机器人运动到某个餐桌处时,若客户取走某道菜品,分桌送餐机器人可以将某个菜品被取走的信息发送给控制台主机8,控制台主机8接收到上述信息后,将该菜品对应的用餐指引或者制造工艺发送给餐桌上的平板电脑9上,客户就能够在用餐指引的指导下就餐或者获知相应菜品的制造工艺,从而极大提升用户体验。
48.本实用新型是通过优选实施例进行描述的,本领域技术人员知悉,在不脱离本实
用新型的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。本实用新型不受此处所公开的具体实施例的限制,其他落入本技术的权利要求内的实施例都属于本实用新型保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。