技术特征:
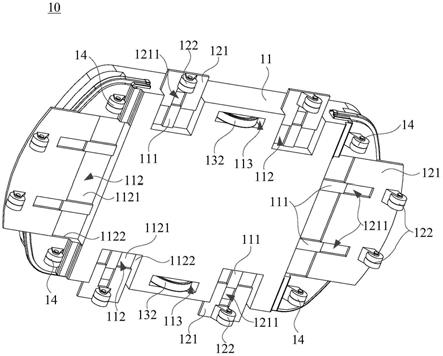
1.一种搬运机器人,其特征在于,包括移动底盘和设置在所述移动底盘上的搬运装置;所述移动底盘包括底盘基体和至少一个滚轮组件,所述滚轮组件设置在所述底盘基体的底面,且所述滚轮组件可延伸至所述底盘基体的边缘外侧或缩回至所述底盘基体的下方。2.根据权利要求1所述的搬运机器人,其特征在于,所述滚轮组件包括伸缩连接件和至少一个滚轮,所述伸缩连接件与所述底盘基体滑动连接,且所述伸缩连接件可相对与所述底盘基体伸出或缩回;至少一个所述滚轮安装在所述伸缩连接件的沿所述伸缩连接件的伸出方向的前端。3.根据权利要求2所述的搬运机器人,其特征在于,所述底盘基体的底面设置有定位块,所述伸缩连接件设置有定位槽,所述定位块插设在所述定位槽内;沿所述伸缩连接件的伸缩方向,所述定位槽可相对于所述定位块滑动。4.根据权利要求3所述的搬运机器人,其特征在于,所述底盘基体的底面靠近边缘的位置设置有容置槽,所述容置槽的槽底延伸至与所述底盘基体的边缘平齐;所述定位块设置在所述容置槽的槽底,所述伸缩连接件安装在所述容置槽内。5.根据权利要求4所述的搬运机器人,其特征在于,所述伸缩连接件上设置有第一配合部,所述容置槽内设置有第二配合部,所述第一配合部和所述第二配合部相互配合;沿所述伸缩连接件的伸缩方向,所述第一配合部可相对于所述第二配合部移动。6.根据权利要求5所述的搬运机器人,其特征在于,所述第二配合部包括第一滑槽,所述第一滑槽设置在所述容置槽的沿所述伸缩连接件的伸缩方向的两侧槽壁;所述第一配合部包括第一滑动部,所述第一滑动部设置在所述伸缩连接件的两侧,或,由所述伸缩连接件的两侧形成;所述第一滑动部位于所述第一滑槽内。7.根据权利要求5所述的搬运机器人,其特征在于,所述第二配合部还包括第二滑槽,所述第二滑槽设置在所述定位块的沿所述伸缩连接件的伸缩方向的两侧壁;所述第一配合部包括第二滑动部,所述第二滑动部设置在所述定位槽的沿所述伸缩连接件的伸缩方向的两侧槽边缘,或,由所述定位槽的两侧槽边缘形成;所述第二滑动部位于所述第二滑槽内。8.根据权利要求2所述的搬运机器人,其特征在于,所述移动底盘还包括伸缩驱动机构,所述伸缩驱动机构设置在所述底盘基体的内部;所述伸缩驱动机构包括驱动件和传动件,所述驱动件和所述传动件传动连接,所述传动件和所述伸缩连接件传动连接,所述驱动件通过所述传动件驱动所述伸缩连接件伸缩。9.根据权利要求1-8中任一项所述的搬运机器人,其特征在于,所述滚轮组件包括至少两个第一滚轮组件;至少两个所述第一滚轮组件分别设置在所述底盘基体的沿行进方向的相对两侧。10.根据权利要求9所述的搬运机器人,其特征在于,所述底盘基体的沿行进方向的相对两侧中,每侧间隔设置有至少两个所述第一滚轮组件,相对两侧的所述第一滚轮组件的数量相等,且,位置一一对齐。11.根据权利要求2-8中任一项所述的搬运机器人,其特征在于,所述滚轮组件包括至少两个第二滚轮组件;至少两个所述第二滚轮组件分别设置在所述底盘基体的沿行进方向的前后两端。12.根据权利要求11所述的搬运机器人,其特征在于,所述第二滚轮组件包括伸缩连接
件和两个滚轮,两个所述滚轮沿垂直于行进方向的方向间隔安装在所述伸缩连接件上。13.根据权利要求2-8中任一项所述的搬运机器人,其特征在于,所述滚轮包括万向轮。14.根据权利要求9所述的搬运机器人,其特征在于,所述移动底盘还包括驱动轮组件,所述驱动轮组件包括驱动机构和连接在所述驱动机构两端的驱动轮;所述驱动机构设置在所述底盘基体的内部。15.根据权利要求1-8中任一项所述的搬运机器人,其特征在于,所述移动底盘还包括多个辅助滚轮,多个所述辅助滚轮分别设置在所述底盘基体底面的沿行进方向的前后两端,且,靠近所述底盘基体的沿行进方向的相对两侧的位置。16.根据权利要求1-8中任一项所述的搬运机器人,其特征在于,所述搬运装置包括立柱框架、货叉组件和升降组件;所述立柱框架设置在所述移动底盘的沿行进方向的中部,所述货叉组件和所述升降组件分别设置在所述立柱框架的沿行进方向的两侧;所述货叉组件用于将货物搬运并码放在所述升降组件所在的一侧的所述移动底盘上,所述升降组件用于将码放在所述移动底盘上的货物提起或放下。17.根据权利要求16所述的搬运机器人,其特征在于,还包括配重块,所述配重块可拆卸的设置在所述货叉组件所在的一侧的所述移动底盘上。
技术总结
本公开提供一种搬运机器人,涉及智能仓储技术领域,用于解决搬运机器人的移动底盘上方码放的货物过多,会导致重心不稳的问题。该搬运机器人包括移动底盘和设置在移动底盘上的搬运装置;移动底盘包括底盘基体和至少一个滚轮组件,滚轮组件设置在底盘基体的底面,且滚轮组件可延伸至底盘基体的边缘外侧或缩回至底盘基体的下方。从而使滚轮组件可以根据搬运机器人的重心变化进行伸缩,以调整对搬运机器人的支撑力,进而有利于保证搬运机器人的稳定性。性。性。
技术研发人员:任子佳 曹董锋 高玉蓉 陈瑶 张璐 谢幸光
受保护的技术使用者:深圳市海柔创新科技有限公司
技术研发日:2021.11.30
技术公布日:2022/5/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。