1.本发明涉及种柔性电子皮肤阵列领域,尤其是涉及一种柔性电子皮肤阵列性能检测系统。
背景技术:
2.类比于人类皮肤对人类生存提供了多方面的感知功能,电子皮肤在人机交互、人工智能和智能医疗等领域具有十分重要的作用。在柔性材料的研究取得进展后,将该种材料应用于触觉传感器制成的电子皮肤在柔性和可拉伸性方面有着极大优势,近些年来更是在压力灵敏度和规模尺寸等方面取得了很大突破。
3.相对于独立的触觉传感器,柔性电子皮肤阵列可以覆盖于不同复杂表面,实现触觉感知,完成所需要的测量任务。对于这种具有多传感单元的柔性电子皮肤阵列,多点接触时存在形变的单元耦合,传统的性能标定手段是对所有传感单元逐一进行标定,重复的工作量大,难以体现单元间的耦合效应,无法描述阵列整体性能。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种柔性电子皮肤阵列性能检测系统。
5.本发明的目的可以通过以下技术方案来实现:
6.一种柔性电子皮肤阵列性能检测系统,柔性电子皮肤包括多个感知单元,包括上位机模块和检测模块,所述检测模块设置在柔性电子皮肤的上表面一侧,所述检测模块包括多个检测单元,所述上位机模块执行以下步骤:
7.s1、控制检测模块接触柔性电子皮肤并进行检测,获取所有检测单元的力变曲线;
8.s2、根据力变曲线获取每个检测单元的性能值;
9.s3、将所有检测单元的性能值输入训练好的神经网络,得到皮肤整体性能;
10.其中,步骤s3中神经网络的训练过程如下:
11.a1、使用检测模块获取带有皮肤整体性能标签的皮肤的性能值;
12.a2、将性能值作为神经网络的输入,将皮肤整体性能标签作为神经网络的输出,训练神经网络。
13.进一步地,所述性能值包括线性度和回滞。
14.进一步地,所述检测模块包括互相连接的接触子模块和测力子模块,所述接触子模块包括接触底座和多个接触柱,所述接触柱均匀设置在接触底座上,每个接触柱为一个检测单元。
15.进一步地,所述接触柱的接触端为半圆形,直径等于柔性电子皮肤的相邻感知单元中心的距离。
16.进一步地,还包括移动模块,所述柔性电子皮肤设置在移动模块上,所述上位机模块控制移动模块朝检测模块方向移动。
17.进一步地,所述上位机模块驱动移动模块以直接接触、接触后滑动或接触后振动的方式使柔性电子皮肤与检测模块接触。
18.进一步地,所述移动模块包括载物台和xyz三轴丝杆滑台。
19.进一步地,所述移动模块以不同方式移动时,所述上位机模块显示移动方式对应的人体手势。
20.与现有技术相比,本发明具有以下优点:
21.1、本发明在检测模块上设置了多个检测单元,并获取所有检测单元的值,通过控制器和神经网络输出皮肤整体性能,解决了现有技术检测单元无法进行耦合的问题,提高了检测的精度。且同时对所有传感单元的值进行了获取和计算处理,无需逐一进行标定,提高了检测的效率。
22.2、本发明对移动模块设置了多种移动柔性电子皮肤的方式,以模仿人体手部的动作,更符合实际使用电子皮肤时所涉及的场景,实用性更强。
附图说明
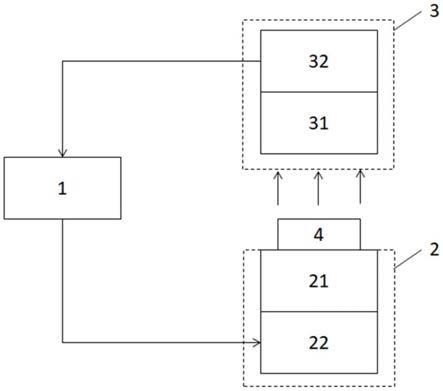
23.图1为本发明的结构示意图。
24.图2为本发明的接触子模块示意图。
25.附图标记:
26.1-上位机模块;2-移动模块;21-载物台;22-xyz丝杆滑台;3-检测模块;31-接触子模块;311-接触底座;312-接触柱;32-测力子模块;4-柔性电子皮肤。
具体实施方式
27.下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
28.本实施例提供了一种柔性电子皮肤阵列性能检测系统,包括上位机模块1、移动模块2和检测模块3。
29.在本实施例中,如图1所示,柔性电子皮肤4设置在移动模块2上,检测模块3设置在柔性电子皮肤1的上侧,检测模块3包括多个检测单元,其中检测模块包括互相连接的接触子模块31和测力子模块32,接触子模块31包括接触底座311和多个接触柱312,如图2所示,接触柱312均匀设置在接触底座311上,每个接触柱312为一个检测单元。具体地,接触子模块31是通过采用高精度光刻技术在刚性表面制备尺寸精准的三维微结构。接触柱312的顶端为半圆形,半圆形的直径等于柔性电子皮肤4上感知单元中心到中心的距离,即可以使检测模块3覆盖每一个感知单元。接触柱312在接触底座311上呈正方形分布,接触柱312之间的间距根据所标定的柔性电子皮肤4尺寸来确定,当柔性电子皮肤4尺寸越大时,接触柱312之间的间距也越大。
30.移动模块2包括载物台21和xyz丝杆滑台22,其中柔性电子皮肤4放置在载物台21上,载物台21通过xyz丝杆滑台22发生移动,其中上位机模块1可通过驱动xyz丝杆滑台22,使载物台21以直接接触、接触后滑动或接触后振动的方式使柔性电子皮肤4与检测模块3接触,目的是为了借鉴人手基于触觉的物体辨识动作,更符合实际使用电子皮肤时所涉及的
场景。另外,接触方式对应的人手手势也会同步显示在上位机模块1中。
31.上位机模块执行以下步骤:
32.步骤s1、控制移动模块移动,使检测模块中的接触子模块接触柔性电子皮肤并进行检测,通过测力子模块获取所有接触柱检测到的力变曲线。
33.步骤s2、根据力变曲线获取性能值。
34.其中,性能值包括线性度和回滞,具体表达式如下:
[0035][0036][0037]
其中,e表示线性度,δmax表示最大偏差,y
fs
表示满量程输出,δh表示回滞,δy
max
表示正反行最大差。
[0038]
步骤s3、将所有检测单元的性能值输入训练好的神经网络,得到皮肤整体性能。
[0039]
其中,神经网络的训练过程如下:
[0040]
步骤a1、使用检测模块获取带有皮肤整体性能标签的皮肤的性能值。
[0041]
步骤a2、将性能值作为神经网络的输入,将皮肤整体性能标签作为神经网络的输出,训练神经网络。
[0042]
其中神经网络可使用卷积神经网络或lstm神经网络。
[0043]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
技术特征:
1.一种柔性电子皮肤阵列性能检测系统,柔性电子皮肤包括多个感知单元,其特征在于,包括上位机模块和检测模块,所述检测模块设置在柔性电子皮肤的上表面一侧,所述检测模块包括多个检测单元,所述上位机模块执行以下步骤:s1、控制检测模块接触柔性电子皮肤并进行检测,获取所有检测单元的力变曲线;s2、根据力变曲线获取每个检测单元的性能值;s3、将所有检测单元的性能值输入训练好的神经网络,得到皮肤整体性能;其中,步骤s3中神经网络的训练过程如下:a1、使用检测模块获取带有皮肤整体性能标签的皮肤的性能值;a2、将性能值作为神经网络的输入,将皮肤整体性能标签作为神经网络的输出,训练神经网络。2.根据权利要求1所述的一种柔性电子皮肤阵列性能检测系统,其特征在于,所述性能值包括线性度和回滞。3.根据权利要求1所述的一种柔性电子皮肤阵列性能检测系统,其特征在于,所述检测模块包括互相连接的接触子模块和测力子模块,所述接触子模块包括接触底座和多个接触柱,所述接触柱均匀设置在接触底座上,每个接触柱为一个检测单元。4.根据权利要求3所述的一种柔性电子皮肤阵列性能检测系统,其特征在于,所述接触柱的接触端为半圆形,直径等于柔性电子皮肤的相邻感知单元中心的距离。5.根据权利要求1所述的一种柔性电子皮肤阵列性能检测系统,其特征在于,还包括移动模块,所述柔性电子皮肤设置在移动模块上,所述上位机模块控制移动模块朝检测模块方向移动。6.根据权利要求5所述的一种柔性电子皮肤阵列性能检测系统,其特征在于,所述上位机模块驱动移动模块以直接接触、接触后滑动或接触后振动的方式使柔性电子皮肤与检测模块接触。7.根据权利要求5所述的一种柔性电子皮肤阵列性能检测系统,其特征在于,所述移动模块包括载物台和xyz三轴丝杆滑台。8.根据权利要求5所述的一种柔性电子皮肤阵列性能检测系统,其特征在于,所述移动模块以不同方式移动时,所述上位机模块显示移动方式对应的人体手势。
技术总结
本发明涉及一种柔性电子皮肤阵列性能检测系统,包括上位机模块、移动模块和检测模块,柔性电子皮肤设置在移动模块上,检测模块设置在柔性电子皮肤的上表面一侧,检测模块包括多个检测单元,上位机模块控制移动模块移动,使检测模块接触柔性电子皮肤并进行检测,获取所有检测单元的力变曲线;根据力变曲线获取每个检测单元的性能值;将所有检测单元的性能值输入训练好的神经网络,得到皮肤整体性能。与现有技术相比,本发明具有检测效率高等优点。本发明具有检测效率高等优点。本发明具有检测效率高等优点。
技术研发人员:周艳敏 张世远 何斌 王志鹏 陆萍 李刚
受保护的技术使用者:同济大学
技术研发日:2022.01.18
技术公布日:2022/5/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
