1.本发明涉及传感器技术领域,尤其涉及一种微柱压电声流传感器装置及水下航行器。
背景技术:
2.水下航行器(包括auv和uuv水下航行器)在水下航行中,其辐射噪声与很多因素有关,其中海洋湍流对航行器壳体的作用发出的噪声,也称为表面湍流噪声。
3.海洋湍流是一种高度复杂的三维非稳态、带旋转的不规则流动,水中任意点的运动速度的大小和方向都紊乱变动,因此对航行器表面湍流噪声的测量成为各国研究的重点。
4.现有的研制出的传感器应用于湍流检测中的压电陶瓷传感器大多是单点检测的方式,即将单个传感器以探头的形式置于航行器的头部,此种结构仅能对海洋迎流噪声进行测量。
5.由于海洋湍流的不规则性,对于航行器侧表面的湍流噪声进行测量也十分关键。
6.综上所述,目前应用于湍流检测中的压电陶瓷传感器,其测量精度不高,因而很难对不断变化的流场进行有效测量,无法满足水下航行器表面湍流观测的需求。
7.此外,传感器在不同的工作应用场景下,对灵敏度以及指向性等性能有着不同的要求。
技术实现要素:
8.本发明的目的在于提出一种微柱压电声流传感器装置,其测量精度高,以便对不断变化的流场进行有效测量,同时使得装置具备空间分布式检测能力。
9.本发明为了实现上述目的,采用如下技术方案:一种微柱压电声流传感器装置,包括上盖板、下基座、电子仓以及传感基元阵列;其中,下基座的上部设有安装槽,电子仓以及传感基元阵列均设置于安装槽内;传感基元阵列由多个矩形压电陶瓷传感基元组成;各个矩形压电陶瓷传感基元呈线阵排列,且排列方向与下基座的长度方向一致;电子仓内设置多通道的前置放大电路其中,各个矩形压电陶瓷传感基元分别通过引线与前置放大电路每个通道的输入端一一对应相连;前置放大电路中每个通道的输出端分别连接有一条信号输出导线;上盖板位于下基座的上方,且与下基座连接;传感基元阵列中各个矩形压电陶瓷传感基元与上盖板的下表面均为接触式连接。
10.优选地,任意相邻两个矩形压电陶瓷传感基元之间的间距均相等。
11.优选地,各个矩形压电陶瓷传感基元大小一致,且均采用长方体结构。
12.优选地,上盖板的上表面为弧面,其表面弧度与航行器侧表面的弧度保持一致。
13.优选地,微柱压电声流传感器装置的外轮廓采用t型结构。
14.优选地,下基座的底部设有与安装槽连通的导线穿孔;其中,各个信号输出导线经由导线穿孔穿出下基座。
15.优选地,微柱压电声流传感器装置还包括外置电源;其中,外置电源的电源线经过导向穿孔伸入至安装槽内并与电子仓相连。
16.优选地,上盖板与下基座之间采用一体结构;在安装槽内除电子仓以及传感基元阵列之外的区域通过环氧树脂进行填充和密封。
17.优选地,电子仓有一个或者有两个以上;且当电子仓数量有两个以上时,每个电子仓上均会连接部分矩形压电陶瓷传感基元。
18.此外,本发明还提出了一种水下航行器,该水下航行器本体侧表面设置上述微柱压电声流传感器装置,以满足水下航行器侧表面湍流观测的需求。
19.本发明为了实现上述目的,采用如下技术方案:一种水下航行器,包括航行器本体以及多个传感器装置;传感器装置采用上述微柱压电声流传感器装置;在航行器本体的侧表面沿着圆周方向均匀设置多个固定槽;每个传感器装置对应放置于一个固定槽内,并通过螺栓安装固定。
20.本发明具有如下优点:如上所述,本发明述及了一种微柱压电声流传感器装置,其包括上盖板、下基座、电子仓以及传感基元阵列;其中,下基座的上部设有安装槽,电子仓以及传感基元阵列均设置于安装槽内。传感基元阵列中各个矩形压电陶瓷传感基元呈线阵排列,且排列方向与下基座的长度方向一致。本发明通过设计传感器采用线阵列的形式,每个基元可以感受其对应位置上的声流情况,使得整个传感基元阵列对复杂的湍流信息具有空间上的分辨能力。此外,本发明还提出了一种水下航行器,该水下航行器包括航行器本体以及多个上述微柱压电声流传感器装置,其中,传感器装置采用与航行器的侧表面共形的方式安装在航行器表面,在复杂的海洋湍流环境中具有良好的便携性,可以有效测量到水下航行器侧表面上的声流信息。
附图说明
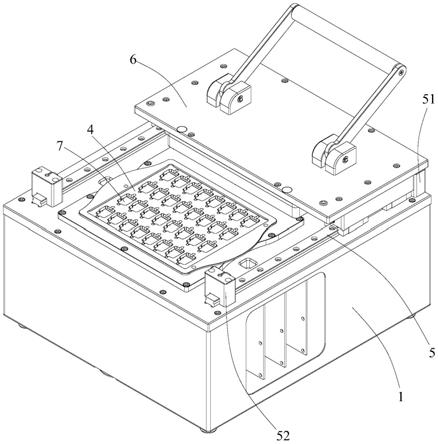
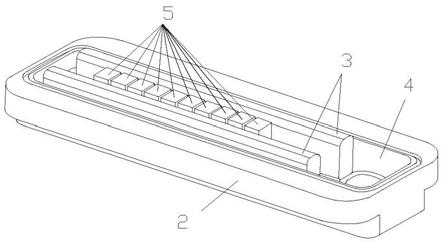
21.图1为本发明实施例1中微柱压电声流传感器装置的结构示意图;图2为本发明实施例1中微柱压电声流传感器装置的内部封装结构示意图;图3为本发明实施例1中单个矩形压电陶瓷传感基元的结构示意图;图4为本发明实施例1中多个矩形压电陶瓷传感基元的阵列排布示意图;图5为本发明实施例1中传感基元阵列与前置放大电路的连接示意图;图6为本发明实施例1中单个矩形压电陶瓷传感基元不同高度的灵敏度仿真结果图;图7为本发明实施例1中单个矩形压电陶瓷传感基元在10khz时指向性仿真结果图;图8为本发明实施例1中传感基元阵列在10hz时指向性仿真结果图;
图9为本发明实施例1中传感基元阵列在10khz时指向性仿真结果图;图10为本发明实施例1中基元间距一定时,不同基元个数下的阵增益仿真结果图;图11为本发明实施例1中基元个数一定时,不同基元间距下的阵增益仿真结果图;图12为本发明实施例2中水下航行器的结构示意图。
22.其中,1-上盖板,2-下基座,3-电子仓,4-安装槽,5-矩形压电陶瓷传感基元,6-前置放大电路,7-引线,8-信号输出导线,9-背板,10-航行器本体,11-传感器装置,12-固定槽。
具体实施方式
23.下面结合附图以及具体实施方式对本发明作进一步详细说明:实施例1本实施例述及了一种微柱压电声流传感器装置。如图1和图2所示,微柱压电声流传感器装置包括上盖板1、下基座2、电子仓3以及传感基元阵列。
24.其中,下基座2的上部设有安装槽4,电子仓3以及传感基元阵列均设置于安装槽4内。
25.本实施例1中传感基元阵列由多个矩形压电陶瓷传感基元5组成。
26.其中,各个矩形压电陶瓷传感基元5呈线阵排列,且排列方向与下基座2的长度方向一致,任意相邻两个矩形压电陶瓷传感基元5之间的间距均相等。
27.如图4所示,在安装槽4的底部设置背板9。
28.各个矩形压电陶瓷传感基元5呈直线型排布在背板9上,且相邻基元之间的间距相等。
29.本实施例中示出的矩形压电陶瓷传感基元5的数量例如有10个,如图2所示,传感基元阵列由10个矩形压电陶瓷传感基元5等间距呈线阵排布。
30.本实施例1充分利用基元个数与基元间距的布局,尽可能增多基元个数,同时缩小基元之间的间隔,使本实施例中传感器装置能保持良好的全指向性。
31.各个矩形压电陶瓷传感基元5(即微柱)大小一致,且均采用长方体结构,如图3所示。
32.电子仓3内设置多通道的前置放大电路6,如图5所示。各个矩形压电陶瓷传感基元5分别通过引线7与前置放大电路6每个通道的输入端一一对应相连。
33.前置放大电路6中每个通道的输出端分别连接有一条信号输出导线8。
34.本实施例1中电子仓3的数量例如有两个,且分别位于传感基元阵列的相对侧。
35.每个电子仓3内均包含一个多通道的前置放大电路6。
36.例如有五个矩形压电陶瓷传感基元5连接到一个电子仓3的前置放大电路6上,另外五个矩形压电陶瓷传感基元5连接到另一个电子仓3的前置放大电路6上。
37.当然,电子仓3的数量也只是示例性的,还可以根据传感基元阵列中矩形压电陶瓷传感基元5的个数合理增减,例如有一个电子仓3,或者三个及以上的电子仓3。
38.上盖板1位于下基座2的上方,且与下基座2之间采用一体结构。
39.本实施例中上盖板1与下基座2连接后,二者共同组成传感器装置的外壳部分。
40.本实施例中水密及透声材料采用环氧树脂,即在安装槽4内除电子仓3以及传感基
元阵列之外的区域通过环氧树脂进行填充和密封,以保证装置的密封以及透声性能。
41.在上盖板1与下基座2连接后,传感基元阵列中各个矩形压电陶瓷传感基元5均与上盖板1的下表面为接触式连接,便于采集在上盖板1处的压力形变。
42.前置放大电路6可以收集矩形压电陶瓷传感基元5因在上盖板1处压力形变产生的电荷。
43.此外,在下基座2的底部设有与安装槽4连通的导线穿孔,各个信号输出导线经由导线穿孔穿出下基座2。此外,微柱压电声流传感器装置还包括外置电源。
44.其中,外置电源的电源线经过导向穿孔伸入至安装槽4内并与电子仓3相连。
45.此外,本实施例1还对上盖板1的上表面(的弧度)进行了合理设计,如图1所示,上盖板1的上表面为弧面,其表面弧度与水下航行器侧表面的表面弧度保持一致。
46.如此设计,使得传感器装置与水下航行器侧表面实现了共形设计,且当传感器装置安装于水下航行器的侧表面固定槽内时,水下航行器的侧表面完整,减少了额外的噪声干扰。
47.如图1所示,微柱压电声流传感器装置的外轮廓(由上盖板1和下基座2组成的外壳部分)采用t型结构,水下航行器的侧表面预先留好的固定槽12也采用t形结构。
48.通过以上设计,便于将本实施例1中装置嵌入水下航行器的侧表面预先留好的固定槽内。
49.当传感器装置弧面因受到应力而变形时,会引起传感器内传感基元阵列中各个基元产生形变,通过正压电效应产生电荷,通过前置放大电路6放大后输出电压。
50.当传感器装置受到来自垂直方向压力作用时,基元阵列中每个基元5均受到向下的压力,向垂直方向产生相应的形变后输出信号,此时每个基元的输出电压方向一致,大小相近。
51.当传感器装置受到来自水平方向的轴剪切力作用时,基元阵列同一轴线上的每个基元会根据近远场压力场脉动形成的不同湍流噪声强度产生不同的压力形变;每个基元5输出电压不同,可以反映出一个压力场梯度,从而反映出湍流的剪切场。
52.由上述过程不难看出,采用线阵排布的基元阵列具有如下优点:本实施例中传感器装置能够对不断变化的流场进行有效测量,阵列中每个敏感单元都可以反映出其对应位置的声流信号,使得传感器装置整体具备空间分布式检测能力。
53.当传感器装置工作时,需要 12v的外置电源给传感器供电。
54.当上盖板1受到正应压力作用时,其下方的由矩形压电陶瓷传感基元5组成的传感基元阵列因应力发生形变产生电荷,电荷经前置放大电路6放大后,通过导线从下基座2引出。
55.本实施例述及的传感器装置,因流场的切变而受到不同的应力,从而通过对多路矩形压电陶瓷传感基元5发出的电信号处理后得到流场的变化情况。
56.将多个传感器装置布放在水下航行器侧壁圆周方向上,能够达到空间分布式检测能力。
57.每个矩形压电陶瓷传感基元5的工作模式属于厚度模式。
58.矩形压电陶瓷传感基元5的灵敏度公式为s3=20lg(v/p)=20lg(g
33
t),其中,s3表示
声压灵敏度,v表示传感器输出电压,p表示传感器所受压力,g
33
表示压电常数,t表示阵元的高度。
59.由上述灵敏度公式,能够看出,本实施例中传感器装置的灵敏度与矩形压电陶瓷传感基元5的高度成正比,根据上述公式得到的灵敏度仿真验证结果,如图6所示。
60.根据仿真结果,传感器装置所需的灵敏度可以根据阵元尺寸高度的不同进行调整。
61.如图7所示,由于在线阵(传感基元阵列)中保证阵元个数尽可能多的前提下,减小阵元的间隔,使得本实施例中传感器装置整体在水平和竖直方向具有全指向性,对各个方向的信号接收一致,在水下探测工作时可以实现全向检测。将多个矩形压电陶瓷传感基元5排成直线形组成阵列形式,能够扩大检测流场的测量范围,同时提高测量的精度,同时为保证多个基元组成线阵后仍能保持良好的全指向性,阵元设计方面要在保证整体全指向性良好的情况下,调整阵元间隔,阵元间隔的大小同时还要小于阵元的半波长。
62.合适的阵列设计达到的全指向性效果在低频环境下如图8所示,高频环境下如图9所示。
63.图8说明了当阵元个数为10,每个基元的间距为5mm,在10hz的工作频率下时的指向性图,阵列对360
°
方向的指向性均保持一致,具有优良的全指向性。
64.图9说明了当阵元个数为10,每个基元的间距为5mm,在10khz的工作频率下时的指向性图,阵列在高频段下虽然指向性增强,但仍具有全指向性检测能力。
65.通过图8和图9看出,在10hz-10khz的频带范围内,传感器整体保持良好的全指向性。
66.本实施例可以根据需要,对传感器装置的灵敏度以及指向性进行合理设计,通过调整阵元尺寸、阵列个数和阵列间隔等参数,以便满足在不同的工作应用场景下,对灵敏度以及指向性等性能的不同的要求。本实施例1中传感器装置,解决了现有的大多数传感器工作频率在100khz以上,在复杂多变的流场环境中,难以进行低频信号的检测的不足。
67.此外,由多个矩形压电陶瓷传感基元5组成的传感基元阵列可以进一步提高阵增益,传感基元阵列增益表示通过基阵获得的信噪比增益,其公式为:ag=10log(snr
out
)/(snr
in
)。
68.其中,ag表示阵增益,snr
out
表示输出信噪比,snr
in
表示输入信噪比。
69.对不同的基元个数和间距波长比进行仿真,得到的结果如图10和图11所示。其中,gain表示阵增益,number表示基元个数,d表示基元间距,λ表示阵列波长。
70.图10表示基元间距一定时,基元个数的增加会提高传感器的阵增益。
71.图11表示基元个数一定时,基元间距的增加会提高传感器的阵增益,且当基元间距等于工作频段的半波长时,可以获得最大的阵增益。
72.本实施例1突破了传统的单点湍流传感器,在面向复杂湍流探测需求时缺乏测量精确性的瓶颈,使得传感器具备空间分布式检测能力,进一步提升阵增益。
73.本实施例1在水下探测过程中具有良好的接收性能,大幅度提高传感器装置输出灵敏度,保证了直线阵列的全指向性,提高了阵增益,解决了直线阵列达到全指向性的难题。
74.本实施例1通过在线阵(传感基元阵列)中保证阵元个数尽可能多的前提下,减小
阵元间隔,最终对设计好的阵列进行有限元仿真获得的指向性图,能够达到预期标准。
75.实施例2本实施例2述及了一种水下航行器,其包括航行器本体10以及多个传感器装置11,如图12所示,各个传感器装置均采用上述实施例1中的微柱压电声流传感器装置。
76.在航行器本体10的侧表面上对应每个传感器装置的位置均设有固定槽12。
77.每个传感器装置11安装于一个固定槽12处,由于上盖板1的上表面为弧面设计,因此当传感器装置11安装后,其与航行器本体10的表面贴合良好,减少额外的噪声干扰。
78.由于各个多个传感器装置11测量精度高,利于对不断变化的流场进行有效测量。
79.本实施例在航行器本体10侧表面周向上布置四个传感器装置11,这四个传感器装置11布置于航行器本体10侧表面的某一个圆周方向的四等分点上。
80.此种设计,使得朝上、朝下、超左、朝右四个方向均有一个传感器装置11存在。
81.当然,以上传感器装置11的数量仅仅为示例性的,还可以是六个,甚至更多。
82.本实施例2通过在航行器本体10的侧表面某一圆周方向上均匀安装上述多个传感器装置11,使得水下航行器能够对于航行器侧表面的湍流噪声也可以进行有效地测量。
83.此外,在航行器本体10的头部设置单个探头形式的压电陶瓷传感器。
84.通过在航行器本体10的头部以及侧表面分别进行传感器设计,利于满足水下航行器表面湍流观测的需求。本发明中水下航行器包括auv水下航行器和uuv水下航行器。
85.当然,以上说明仅仅为本发明的较佳实施例,本发明并不限于列举上述实施例,应当说明的是,任何熟悉本领域的技术人员在本说明书的教导下,所做出的所有等同替代、明显变形形式,均落在本说明书的实质范围之内,理应受到本发明的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。