技术特征:
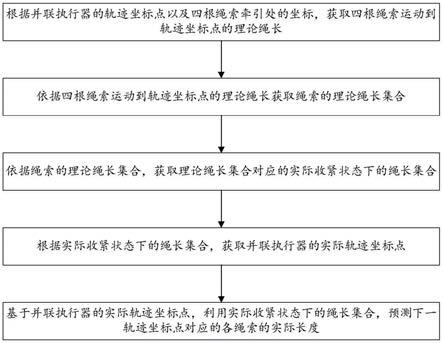
1.一种基于预测绳索长度的四柔索牵引并联执行器运动姿态控制方法,其特征在于:包括如下步骤,s1、根据并联执行器的轨迹坐标点以及四根绳索牵引处的坐标,获取四根绳索运动到轨迹坐标点的理论绳长;s2、依据四根绳索运动到轨迹坐标点的理论绳长获取绳索的理论绳长集合;s3、依据绳索的理论绳长集合,获取理论绳长集合对应的实际收紧状态下的绳长集合;s4、根据实际收紧状态下的绳长集合,获取并联执行器的实际轨迹坐标点;s5、基于并联执行器的实际轨迹坐标点,利用实际收紧状态下的绳长集合,预测下一轨迹坐标点对应的各绳索的实际长度。2.根据权利要求1所述的基于预测绳索长度的四柔索牵引并联执行器运动姿态控制方法,其特征在于:步骤s1具体为,假设并联执行器的任意轨迹坐标点为e(x,y,z),四根绳索牵引处的坐标点分别表示为a、b、c、d,这四个坐标点的坐标值分别为a(x1,y1,z1)、b(x2,y2,z2)、c(x3,y3,z3)、d(x4,y4,z4);则四根绳索运动到任意轨迹坐标点e的理论绳长分别为l1、l2、l3、l4,计算公式如下,);则四根绳索运动到任意轨迹坐标点e的理论绳长分别为l1、l2、l3、l4,计算公式如下,);则四根绳索运动到任意轨迹坐标点e的理论绳长分别为l1、l2、l3、l4,计算公式如下,);则四根绳索运动到任意轨迹坐标点e的理论绳长分别为l1、l2、l3、l4,计算公式如下,3.根据权利要求2所述的基于预测绳索长度的四柔索牵引并联执行器运动姿态控制方法,其特征在于:步骤s2中获取的绳索的理论绳长集合为l,其表达式为,其中,n为并联执行器的运动轨迹点所对应的绳索记录数据;第一行的n个数据从左至右依次为第一根绳索运行到n个轨迹坐标点所对应的理论绳长;第二行的n个数据从左至右依次为第二根绳索运行到n个轨迹坐标点所对应的理论绳长;第三行的n个数据从左至右依次为第三根绳索运行到n个轨迹坐标点所对应的理论绳长;第四行的n个数据从左至右依次为第四根绳索运行到n个轨迹坐标点所对应的理论绳长。4.根据权利要求3所述的基于预测绳索长度的四柔索牵引并联执行器运动姿态控制方法,其特征在于:步骤s3中获取的实际收紧状态下的绳长集合为ls,其表达式为,
其中,第一行的n个数据从左至右依次为第一根绳索运行到n个轨迹坐标点所对应的实际收紧状态下的绳长;第二行的n个数据从左至右依次为第二根绳索运行到n个轨迹坐标点所对应的实际收紧状态下的绳长;第三行的n个数据从左至右依次为第三根绳索运行到n个轨迹坐标点所对应的实际收紧状态下的绳长;第四行的n个数据从左至右依次为第四根绳索运行到n个轨迹坐标点所对应的实际收紧状态下的绳长。5.根据权利要求4所述的基于预测绳索长度的四柔索牵引并联执行器运动姿态控制方法,其特征在于:步骤s4具体为,根据四根绳索实际收紧状态下的绳长,获取并联执行器的实际轨迹坐标点e
f
(x
f
,y
f
,z
f
),计算过程如下,其中,dls为对ls求导;j(e
f
)为并联执行器在位置e
f
处的雅克比矩阵;de
f
为对e
f
求导;且求导;且求导;且求导;且其中,m=1,2,3,4;利用牛顿迭代法求解并联执行器的实际轨迹坐标点e
f
(x
f
,y
f
,z
f
):设置迭代初始位置为e
fc
(x
fc
,y
f
c,z
fc
),定位精度要求为eps,e
fc
(x
fc
,y
fc
,z
fc
)=e
fc
[0,0,0]eps=0.000001;利用下式获取并联执行器的实际轨迹坐标点e
f
(x
f
,y
f
,z
f
),e
fr 1
=e
fr
(j-1
(e
fr
))(l
*-l
r
)其中,e
fr 1
表示在r位置处的终止迭代位置;e
fr
表示绳索在r位置处的迭代位置;l
*
为驱
动绳索的长度向量,l
r
为第r次迭代得到的绳索长度值;j-1
(e
fr
)为第r次迭代得到的雅克比矩阵的逆矩阵;r为迭代次数,迭代终止的条件是||e
fr 1-e
fr
||≤eps。6.根据权利要求5所述的基于预测绳索长度的四柔索牵引并联执行器运动姿态控制方法,其特征在于:步骤s5具体为,通过实际收紧状态下的绳长集合ls中的第m根绳索来预测其在下一轨迹坐标点对应的实际长度,绳索m在实际收紧状态下的绳长集合为ls
m
,其中,括号中的n个数据从左至右依次为绳索m运行到n个轨迹坐标点所对应的实际收紧状态下的绳长;经过一次累加ls
m
后生成的新数据集为,其中,ls
mm
(i)为绳索m在实际收紧状态下的绳长集合ls
m
经过累加后的新数据集;j为原始数据集中的元素,i为累加数据集中的元素;新数据集的组合表达式为,设ls
mm
满足一阶常微分方程,则,其中,t为时序;a,u为常数;则根据上式推导出ls
mm
的时序响应方程为,其中,与通过最小二乘估计来获得;通过上式即可获取后时序的绳索收紧长度;后时序的绳索收紧长度集合为ls
mm
;k为数据变量值;k=1,2,3,...,n时,ls
mm
(k 1)为拟合值;当k≥n时,ls
mm
(k 1)为预测值;利用绳索的理论绳长集合l与后时序的绳索收紧长度集合为ls
mm
进行加权计算,即可获取绳索m在下一轨迹坐标点对应的实际长度ls
m
′
,其中,δ为权值系数,计算公式为,
技术总结
本发明公开了一种基于预测绳索长度的四柔索牵引并联执行器运动姿态控制方法,包括S1、根据并联执行器的轨迹坐标点以及四根绳索牵引处的坐标,获取四根绳索运动到轨迹坐标点的理论绳长;S2、获取绳索的理论绳长集合;S3、获取理论绳长集合对应的实际收紧状态下的绳长集合;S4、获取并联执行器的实际轨迹坐标点;S5、基于并联执行器的实际轨迹坐标点,利用实际收紧状态下的绳长集合,预测下一轨迹坐标点对应的各绳索的实际长度。优点是:通过预测绳索长度的方式,将绳索的误差反馈补偿到预测中,修正绳索的实际长度,从而使其控制姿态更加精准;解决了由于悬垂引起的控制精度不高的问题,提升了目标的控制精度。提升了目标的控制精度。提升了目标的控制精度。
技术研发人员:周姣 吴飞 王彭 李同进
受保护的技术使用者:北京北特圣迪科技发展有限公司
技术研发日:2022.01.27
技术公布日:2022/5/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。