1.本发明涉及卫星故障诊断技术领域,具体地,涉及一种卫星姿轨控分系统在轨实时故障诊断方法及系统。
背景技术:
2.航天领域是一个高风险、高投资、高效益的领域,因故障导致卫星使用效率降低或失效,对国民经济和国防建设影响很大。据统计的国内68颗卫星中,有55颗卫星发生过状态异常或故障,卫星发生故障的比例在80.9%。国内外航天实践表明,卫星在轨发生故障难以避免,能够对卫星在轨故障进行有效诊断,成为反映卫星管控水平和保障卫星在轨安全可靠运行的重要标志。卫星控制、电源分系统的故障高发,其中,控制分系统故障率最高、依次分别是测控分系统和电源分系统,三者合计占卫星平台故障总数的83.4%。
3.因此,开展卫星姿态控制系统故障检测技术研究能够有效地监测姿态控制系统的运行状态,及时检测出姿态控制系统出现的故障,是提高卫星在轨可靠性和安全性,减少安全隐患风险和防止系统灾难性事故发生的有效途径和必要手段。
4.在公告号为cn104134010b的中国发明专利文件中,介绍了一种基于朴素贝叶斯算法面向离散型数据的卫星故障诊断方法,需要对卫星事件型状态监测数据进行统计和预处理,运用概率论诊断卫星故障。在公开号为cn105574166a的中国发明专利申请文件中,介绍了基于卫星故障字典的故障诊断方法,利用卫星设计知识,采用分级方式建立故障字典,根据卫星的遥测数据和诊断知识规则进行卫星故障诊断。上述两种方法由于星载计算机和诊断资源有限,无法进行在轨实时故障诊断。
5.在公告号为cn105825271b的中国发明专利文件中,提出了一种基于证据推理的卫星故障诊断和预测方法,把解析的er方法应用于卫星的故障诊断,并把前p时间的故障诊断结果和当前的故障诊断镜像神经网络训练,找出前p时刻和当前时刻的关联,完成故障预测和诊断。该方法在故障预测过程中所需的参数多。
6.在公告号为cn104019831b的中国发明专利文件中,介绍了一种基于emd和熵权的陀螺仪故障诊断方法,利用一个轴上的陀螺角速度信号提取故障特征信息。使用熵权完成故障诊断。该方法仅适用于单一信号的过程监测,并且其抗干扰能力有待进一步提升。
7.在公告号为cn105157728b的中国发明专利文件中,提出了一种航天器姿系统多故障诊断方法,需要建立复杂的航天器增广姿控动力学模型以及rbf神经网络干扰观测器,对执行器故障、陀螺仪故障和姿态敏感器故障进行重构,根据重构故障值和隔离阈值完成多故障诊断,其中rbf神经网络需要大量的遥测或试验数据进行训练。
8.目前卫星在轨故障诊断方法主要包括基于定性定量模型的故障诊断方法基于规则的故障诊断方法和基于数据驱动的故障诊断方法三种。以上卫星故障诊断方法在工程应用方面存在以下不足:
9.一、所建解析模型复杂,所需参数多;
10.二、通用性弱;
11.三、抗干扰能力不强;
12.四、可恢复性差;
13.五、在轨实时诊断受限。
14.为克服以上方法的不足,本专利提出了一种卫星姿轨控分系统在轨实时故障诊断方法及系统。
技术实现要素:
15.针对现有技术中的缺陷,本发明的目的是提供一种卫星姿轨控分系统在轨实时故障诊断方法及系统。
16.根据本发明提供的一种卫星姿轨控分系统在轨实时故障诊断方法,包括:选取卫星姿轨控系统中一个组件的输出残差为物理量m,引入三个计算参数包括惩罚值p,物理量阈值n和健康饱和值s来计算健康积分值h,利用健康积分值h在轨实时判断卫星姿轨控分系统处于健康或故障,引入健康饱和值s避免故障诊断误报警。
17.优选的,包括以下步骤:
18.步骤s1:选择卫星姿轨控分系统中执行器、控制单元和敏感器中的一个为诊断对象,设计无故障诊断对象的观测器f,观测器f对所选诊断对象的故障敏感,选取观测器f的输出残差为物理量m。
19.步骤s2:用于计算健康积分值h的参数包括惩罚值p,物理量阈值n和健康饱和值s,设定健康积分值h的初始值为s。
20.步骤s3:选择固定采样大小的评估区间,对评估区间内的每个采样点判断所述物理量m与物理量阈值n的大小关系,采用奖惩机制,当物理量m大于物理量阈值n时,健康积分值h减去p,否则健康积分值h加上0.1p。
21.步骤s4:当健康积分值h累计到s时,若评估区间内下一采样点物理量m,仍然小于或等于物理量阈值n,则对应健康积分值h仍取s;当健康积分值h累计到-s时,若评估区间内下一采样点物理量m,仍然大于物理量阈值n,则对应健康积分值h仍取-s。
22.步骤s5:根据计算的健康积分值h,判断系统工作状态,若健康积分值h大于等于0,则输出系统健康,否则输出系统故障,并返回步骤s3进行下一评估区间的卫星姿轨控分系统在轨实时故障诊断。
23.优选的,所述的物理量阈值n,其选取方法为:
24.物理量m作为观测器f的输出残差,满足其中k是观测器f的设计常数,v是不确定性和扰动,物理量阈值n表示为:
25.n=sup k||v||
rms
26.其中||
·
||
rms
为均方根。
27.优选的,所述惩罚值p选取方法如下:
28.卫星姿控分系统正常运行的状态下,物理量m大于物理量阈值n的概率为α,选取惩罚值:
29.30.优选的,所述的健康饱和值s为系统可容忍度与惩罚值p的乘积,所述的系统可容忍度为系统在评估区间内物理量m大于物理量阈值n出现的最大次数,若超过这个次数,则系统健康积分值小于0,系统故障。
31.与现有技术相比,本发明具有如下的有益效果:
32.1、满足卫星姿轨控分系统在轨实时故障诊断的需求,利用健康积分值h进行卫星姿轨控分系统的在轨实时故障诊断。与其他卫星姿轨控分系统故障诊断的方法相比,本方法使用奖惩机制计算健康积分值h,并用于姿控分系统的故障诊断,具有故障诊断过程简洁统一规范,故障诊断系统抗干扰、故障诊断通用性广的优势,不仅可应用于单一部件的故障诊断问题,还可应用于多部件融合诊断问题。
附图说明
33.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
34.图1为本发明实施例中卫星姿轨控分系统示意图;
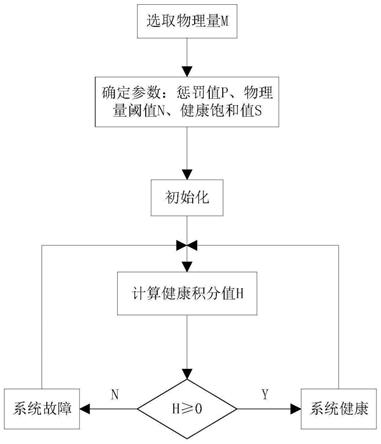
35.图2为本发明实施例中卫星姿轨控分系统在轨实时故障诊断流程图。
具体实施方式
36.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
37.一个完整的卫星姿轨控分系统包括执行器、控制单元和敏感器。其中的任何一个组件都有可能出现故障,在这种情况下,卫星姿轨控系统的故障诊断的首要任务就是判断系统有无故障,以及故障来源于其中的哪类机构。某卫星姿轨控分系统见图1。本方法不考虑过程故障的发生,可单独诊断执行机构、陀螺组件和星敏感器的故障中的一种故障,也可进行多种故障融合诊断。
38.一种卫星姿控分系统在轨实时故障诊断方法,如图2所示,该方法包括如下步骤:
39.步骤s1:选取物理量m。一个完整的卫星姿轨控分系统包括执行器、控制单元、敏感器。选择一个诊断对象,设计无故障诊断对象的观测器f,其对所选的诊断对象的故障敏感,选取观测器f的输出残差为物理量m。
40.步骤s2:确定三个参数,并初始化。健康积分值h用于判断故障诊断对象有无故障,确定用于计算健康积分值h的三个参数,包括惩罚值p,物理量阈值n,健康饱和值s。三个参数取值根据故障诊断对象的特性确定,h初始赋值s。
41.物理量阈值n的确定。物理量m作为观测器f的残差,其满足其中k是观测器f的设计常数,v是不确定性和扰动。因此,物理量阈值选为:
42.n=sup k||v||
rms
43.其中||
·
||
rms
为均方根。
44.惩罚值p的确定。卫星姿控分系统正常运行的状态下,物理量m大于物理量阈值n的
概率为α,选取惩罚值:
[0045][0046]
健康饱和值s的确定。健康饱和值s=系统可容忍度
×
惩罚值。其中系统可容忍度为系统在评估区间内物理量m大于物理量阈值n出现的最大次数,若超过这个次数,则系统健康积分值小于或等于0,系统故障。
[0047]
步骤s3:计算健康积分值h。选择固定采样大小的评估区间,对评估区间内的每个采样点判断所述物理量m与物理量阈值n的大小关系,采用奖惩机制,当物理量m大于物理量阈值n时,健康积分值h减去p,否则健康积分值h加上0.1p。
[0048]
步骤s4:饱和处理。当健康积分值h累计到s时,若评估区间内下一采样点物理量m仍然小于或等于物理量阈值n,则对应健康积分值h仍取s;当健康积分值h累计到-s时,若评估区间内下一采样点物理量m仍然大于物理量阈值n,则对应健康积分值h仍取-s;若当前采样点计算的健康积分值h小于0且上一采样点的健康积分值h大于等于零,则取当前采样点的健康积分值h为-s。
[0049]
步骤s5:判断系统工作状态。根据计算的健康积分值h,判断系统工作状态。如果健康积分值h大于等于0,则输出系统健康,否则输出系统故障,返回步骤s3进行下一评估区间的卫星姿轨控分系统在轨实时故障诊断。
[0050]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0051]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。