1.本实用新型属于全息数据存储技术领域,具体涉及基于嵌入式数据的非干涉相位检出装置。
背景技术:
2.全息数据存储技术是非常有潜力的海量数据长存技术,因为其采用三维体存储信息记录方式和二维数据页数据传输方式,比现有存储方式具有维度上的提升。但现有的全息数据存储记录密度与理论值相差较远,因为其仅仅使用振幅编码,而忽略了光的其他特征,例如相位。而事实上相位编码与振幅编码相比,在编码率和信噪比上都有很大提升,能够显著提高数据记录密度和数据转换速度。
3.但是相位信息无法被光电探测器直接获取,这成为限制相位型全息数据存储技术发展的关键因素。通常对相位信息进行检出需要利用干涉法或非干涉的计算迭代方式。但全息存储对稳定性要求较高,干涉法由于受环境影响太大、稳定性不够而不适用于实际应用。传统的非干涉计算迭代方法虽然可以稳定的获取图像并进行迭代将相位检出,但是往往需要成百上千次的迭代次数才能获得可接受的相位检出精度,导致大大降低了数据转换速度。
技术实现要素:
4.本实用新型提供基于嵌入式数据的非干涉相位检出装置,通过利用嵌入式数据为迭代计算提供强有力的约束条件,使原本需要成百上千次的迭代次数缩短两个数量级左右,并且在相位检出精度上有所提升,且能够通过调整嵌入式数据的比例,控制迭代次数以满足不同应用的需要。
5.本实用新型的技术方案如下:
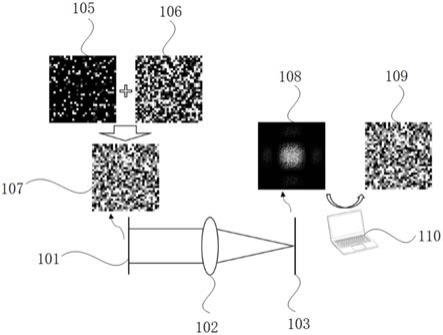
6.本实用新型的基于嵌入式数据的非干涉相位检出装置,包括依次设置的物面、光学系统、透镜、傅里叶变换面和迭代计算处理器;物面用于上载所述原始相位数据;所述光学系统用于将所述原始相位数据记录在全息材料上、并进行信息读取以获得所述待检测相位数据;透镜用于产生所述待检测相位数据傅里叶变换的频谱强度分布;傅里叶变换面用于接收获得所述待检测相位数据傅里叶变换的所述频谱强度分布;迭代计算处理器用于对所述待检测相位数据傅里叶变换的所述频谱强度分布进行迭代计算,以得到所述检出相位数据。
7.优选的,物面为相位调制空间光调制器。
8.优选的,所述光学系统包括沿着光线传播方向依次设置的第一物镜、全息材料和第二物镜。
9.优选的,透镜为傅里叶变换透镜。
10.优选的,傅里叶变换面为光电探测器。
11.优选的,所述待检测相位数据与所述原始相位数据呈4f系统。即物面与傅里叶变
换面之间的距离为四倍的透镜的焦距。
12.优选的,调制空间光调制器前方沿着光束传播方向依次设置有激光器、针孔滤波器、准直透镜、快门、全息光阑组、第一中继透镜、第二中继透镜和第一非偏振立体分束器和二分之一波片,二分之一波片设置在第一非偏振立体分束器的透射光传播方向上。
13.优选的,第一物镜设置在第一非偏振立体分束器的反射光传播方向上。
14.优选的,第一中继透镜和第二中继透镜组成4f系统。
15.优选的,相位调制空间光调制器为反射式空间光调制器。
16.优选的,第一物镜和第二物镜为参数相同的透镜。
17.优选的,全息光阑组为第一同轴全息光阑组,所述第一同轴全息光阑组的中心处为信息光部分,所述信息光部分的外围为参考光部分,所述信息光部分与所述参考光部分构成同轴结构。
18.优选的,第二物镜和傅里叶变换透镜之间设置有第二同轴全息光阑组,第二同轴全息光阑组的中心处为信息光部分,所述信息光部分的外围为参考光部分,所述信息光部分与所述参考光部分构成同轴结构。
19.优选的,第二同轴全息光阑组的形状与所述第一同轴全息光阑组相同。
20.优选的,第二同轴全息光阑组的所述参考光部分的光强透光率小于所述第一同轴全息光阑组的所述参考光部分的光强透光率。
21.优选的,第二同轴全息光阑组的所述参考光部分镀有参考光光强透光率衰减膜层。
22.优选的,全息光阑组为离轴全息光阑组,所述离轴全息光阑组上设置有信息光透过部分;快门和所述离轴全息光阑组之间设置有第二非偏振立体分束器;所述离轴全息光阑组设置在第二非偏振立体分束器的透射光路上;第二非偏振立体分束器的反射光路上设置有第一平面反射镜,第一平面反射镜的反射光路上设置有第二平面反射镜,全息材料设置在第二平面反射镜的反射光路上。
23.本实用新型的有益效果如下:
24.本实用新型的基于嵌入式数据的非干涉相位检出方法和检出装置,通过利用嵌入式数据为迭代计算提供强有力的约束条件,使原本需要成百上千次的迭代次数缩短两个数量级左右,并且在相位检出精度上有所提升,且能够通过调整嵌入式数据的比例,控制迭代次数以满足不同应用的需要;其在相位检出的迭代过程中嵌入式数据可提供强约束力,以此来保证迭代快速收敛至最优解,大大缩短所需迭代次数,提高数据转换速度。
附图说明
25.图1为本实用新型的基于嵌入式数据的非干涉相位检出方法和检出装置模型图。
26.图2为本实用新型的基于嵌入式数据的非干涉相位检出方法的流程图。
27.图3为不同嵌入式数据比例下的傅里叶面强度误差率与迭代次数的曲线图。
28.图4为嵌入式数据的规则位置分布和随机位置分布对比图。图4中左侧为规则位置分布,右侧为随机位置分布。
29.图5为嵌入式数据的规则相位编码分布和随机相位编码分布对比图。图5中左侧为规则相位编码分布,右侧为随机相位编码分布。
30.图6为图5在傅里叶面上的有规律频谱分布和随机频谱分布对比图。图6中左侧为有规律频谱分布,右侧为随机频谱分布。
31.图7为嵌入式数据与未知相位数据具有不同空间频率的示意图。
32.图8为嵌入式数据单元的光强度与未知相位数据单元光强度不相同的示意图。
33.图9为图8中观测处的光强度曲线图。
34.图10为未知相位数据位置与嵌入式数据位置不相邻的示意图。图10中左侧为未知相位数据位置,右侧为嵌入式数据位置。
35.图11为基于嵌入式数据的非干涉相位检出装置为同轴全息存储非干涉相位检出系统的结构示意图。
36.图12为同轴全息存储非干涉相位检出系统的第一全息光阑组结构示意图。
37.图13为同轴全息存储非干涉相位检出系统的第二全息光阑组的结构示意图。
38.图14为基于嵌入式数据的非干涉相位检出装置为离轴全息存储非干涉相位检出系统的结构示意图。
39.图15为离轴全息存储非干涉相位检出系统的离轴全息光阑组的结构示意图。
40.图中,101为物面,102为透镜,103为傅里叶变换面,104为观测线,105为嵌入式数据,106为未知相位数据,107为原始相位数据,108为待检测相位数据傅里叶变换的频谱强度分布,109为检出相位数据,110为迭代计算处理器,1为激光器,2为针孔滤波器,3为准直透镜,4为快门,5为全息光阑组,6为第一中继透镜,7为第二中继透镜,8为第一非偏振立体分束器,9为二分之一波片,10为相位调制空间光调制器,11为第一物镜,12为全息材料,13为第二物镜,14为傅里叶变换透镜,15为光电探测器,161为第二同轴全息光阑组,162为第二非偏振立体分束器,17为第一平面反射镜,18为第二平面反射镜。
具体实施方式
41.下面结合附图及实施例描述本实用新型具体实施方式:
42.实施例1:
43.如图1所示,基于嵌入式数据的非干涉相位检出装置,用于实现上述基于嵌入式数据的非干涉相位检出方法,包括依次设置的物面101、光学系统、透镜102、傅里叶变换面103和迭代计算处理器110;物面101用于上载所述原始相位数据107;所述光学系统用于将所述原始相位数据107记录在全息材料12上、并进行信息读取以获得所述待检测相位数据;透镜102用于产生所述待检测相位数据傅里叶变换的频谱强度分布108;傅里叶变换面103用于接收获得所述待检测相位数据傅里叶变换的所述频谱强度分布;迭代计算处理器110用于对所述待检测相位数据傅里叶变换的所述频谱强度分布进行迭代计算,以得到所述检出相位数据109。迭代计算处理器110可以为计算机。
44.实施例2:
45.如图11和图14所示,实施例1的基于嵌入式数据的非干涉相位检出装置,可以更为具体的,物面101为相位调制空间光调制器10。所述光学系统包括沿着光线传播方向依次设置的第一物镜11、全息材料12和第二物镜13。透镜102为傅里叶变换透镜14。傅里叶变换面103为光电探测器15。
46.进一步的,所述待检测相位数据与所述原始相位数据107呈4f系统。即物面101与
傅里叶变换面103之间的距离为四倍的透镜102的焦距。
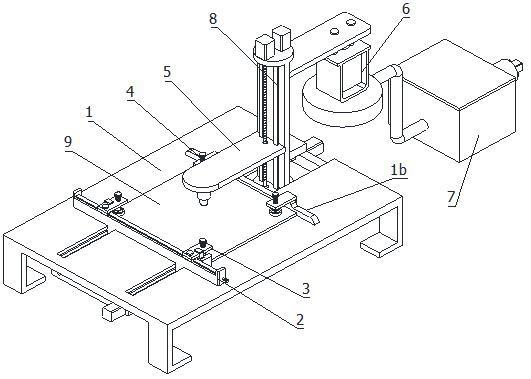
47.如图11和图14所示,进一步的,调制空间光调制器10前方沿着光束传播方向依次设置有激光器1、针孔滤波器2、准直透镜3、快门4、全息光阑组5、第一中继透镜6、第二中继透镜7和第一非偏振立体分束器8和二分之一波片9,二分之一波片9设置在第一非偏振立体分束器8的透射光传播方向上。
48.如图11和图14所示,进一步的,第一物镜11设置在第一非偏振立体分束器8的反射光传播方向上。
49.进一步的,第一中继透镜6和第二中继透镜7组成4f系统。
50.如图11和图14所示,进一步的,相位调制空间光调制器10为反射式空间光调制器。
51.进一步的,第一物镜11和第二物镜13为参数相同的透镜。
52.实施例3:
53.如图11和图12所示所示,实施例2的基于嵌入式数据的非干涉相位检出装置,可以更为具体的,构成同轴全息存储非干涉相位检出系统,其全息光阑组5为第一同轴全息光阑组,所述第一同轴全息光阑组的中心处为信息光部分,所述信息光部分的外围为参考光部分,所述信息光部分与所述参考光部分构成同轴结构。
54.如图13所示,进一步的,第二物镜13和傅里叶变换透镜14之间设置有第二同轴全息光阑组161,第二同轴全息光阑组161的中心处为信息光部分,所述信息光部分的外围为参考光部分,所述信息光部分与所述参考光部分构成同轴结构。
55.如图12和图13所示,进一步的,第二同轴全息光阑组161的形状与所述第一同轴全息光阑组相同。
56.如图13所示,进一步的,第二同轴全息光阑组161的所述参考光部分的光强透光率小于所述第一同轴全息光阑组的所述参考光部分的光强透光率。
57.如图13所示,进一步的,第二同轴全息光阑组161的所述参考光部分镀有参考光光强透光率衰减膜层。
58.本实施例的基于嵌入式数据的非干涉相位检出装置,其同轴全息存储非干涉相位检出系统,可以如图11至图13所示,激光器1发出激光,例如波长为532nm的绿色激光,经过针孔滤波器2和准直透镜3变成光束质量良好的平行光,再经过快门4和全息光阑5组后,其中全息光阑5为第一同轴全息光阑组,圆形光束变为第一同轴全息光阑组中形状的光束。第一中继透镜6和第二中继透镜7组成4f系统,即第一中继透镜6和第二中继透镜7的焦距相等,且第一中继透镜6和第二中继透镜7之间的距离为四倍的焦距,这样的目的是使得第一同轴全息光阑组与相位调制空间光调制器10的面位置相同,即第一同轴全息光阑组与相位调制空间光调制器10的面均为物面101。光束继续通过第一非偏振立体分束器8和二分之一波片9,第一非偏振立体分束器8的作用是将相位调制空间光调制器10反射回来的光反射到另一方向,二分之一波片9的作用是调节光束的偏振状态,使得光束入射到相位调制空间光调制器10上后,带有准确的相位信息。相位调制空间光调制器10的作用是上载设计完成的相位图,光束照射相位调制空间光调制器10后即带有相位图信息。由于相位调制空间光调制器10是反射式的,因此光会原路返回,并再次经过第一非偏振立体分束器8时反射到另一方向。第一物镜11和第二物镜13是一对相同参数的物镜,用于记录和重现物面信息。全息材料12对光场具有响应并通过材料结构的变化产生折射率差,全息材料12上记录相位调制空
间光调制器10上带有的相位图信息。第二同轴全息光阑组161的光阑形状与第一同轴全息光阑组相同,不同的是第二同轴全息光阑组161中在参考光部分镀膜,以对参考光部分的能量进行适当衰减。傅里叶变换透镜14对第二同轴全息光阑组161后的图像进行光学傅里叶变换,其变换后的频谱强度由光电探测器15接收。
59.其中,如图12和图13所示,第一同轴全息光阑组和第二同轴全息光阑组161中心为信息光部分,外圈为参考光部分。信息光部分可以为正方形,但是不限于正方形,参考光部分可以为环形,但是不限于环形,例如参考光部分可以为圆环形,但是不限于圆环形。且第二同轴全息光阑组161参考光部分镀膜,以减少此部分的光强透光率。
60.实施例4:
61.如图14和图15所示,实施例3的基于嵌入式数据的非干涉相位检出装置,可以更为具体的,构成离轴全息存储非干涉相位检出系统,其全息光阑组5为离轴全息光阑组,所述离轴全息光阑组上设置有信息光透过部分;快门4和所述离轴全息光阑组之间设置有第二非偏振立体分束器162;所述离轴全息光阑组设置在第二非偏振立体分束器162的透射光路上;第二非偏振立体分束器162的反射光路上设置有第一平面反射镜17,第一平面反射镜17的反射光路上设置有第二平面反射镜18,全息材料12设置在第二平面反射镜18的反射光路上。
62.本实施例的基于嵌入式数据的非干涉相位检出装置,其离轴全息存储非干涉相位检出系统,可以如图14和图15所示,激光器1发出激光,例如波长为532nm的绿色激光,经过针孔滤波器2和准直透镜3变成光束质量良好的平行光,经过快门4,经过作为离轴全息光阑组的全息光阑组5后,圆形光束变为全息光阑组5中形状的光束。第一中继透镜6和第二中继透镜7组成4f系统,即第一中继透镜6和第二中继透镜7的焦距相等,且第一中继透镜6和第二中继透镜7之间的距离为四倍的焦距,这样的目的是使得第一同轴全息光阑组与相位调制空间光调制器10的面位置相同,即第一同轴全息光阑组与相位调制空间光调制器10的面均为物面101。光束继续通过第一非偏振立体分束器8和二分之一波片9,第一非偏振立体分束器8的作用是将相位调制空间光调制器10反射回来的光反射到另一方向;二分之一波片9的作用是调节光束的偏振状态,使得光束入射到相位调制空间光调制器10上后,带有准确的相位信息。相位调制空间光调制器10的作用是上载设计完成的相位图,光束照射相位调制空间光调制器10后即带有相位图信息;由于相位调制空间光调制器10是反射式的,因此光会原路返回,并再次经过第一非偏振立体分束器8时反射到另一方向。第一物镜11和第二物镜13是一对相同参数的物镜,用于记录和重现物面信息。全息材料12对光场具有响应并通过材料结构的变化产生折射率差,记录下相位调制空间光调制器10上带有的相位图信息。在离轴全息存储非干涉相位检出系统中,全息材料12记录信息时,需要一束参考光与相位调制空间光调制器10信息光进行干涉,因此参考光来源于经过第二非偏振立体分束器162以及第一平面反射镜17和第二平面反射镜18平面反射镜的光束、且照射到全息材料12上的光;傅里叶变换透镜14对第二物镜13后的重建光图像进行光学傅里叶变换,其变换后的频谱强度由光电探测器15接收。
63.其中,如图15所示,作为离轴全息光阑组的全息光阑组5中心为信息光透过部分,其可以为正方形,但是不限于正方形。
64.参见图1和图2,基于嵌入式数据的非干涉相位检出装置的检出方法,可以包括以
下步骤:
65.在编码阶段,将嵌入式数据105与未知相位数据一同编入原始相位数据107中;
66.将所述原始相位数据107记录到全息材料12中,并在信息读取后,获得待检测相位数据;
67.将所述待检测相位数据傅里叶变换的频谱强度分布108,经迭代计算得到检出相位数据109。
68.参见图1和图2,实施例1的基于嵌入式数据的非干涉相位检出方法,进一步地,将所述嵌入式数据105与所述未知相位数据一同编入原始相位数据107中时,将预设比例的所述嵌入式数据105与所述未知相位数据一同编入所述原始相位数据107中。
69.进一步地,将所述原始相位数据107记录到所述全息材料中时,将所述原始相位数据107通过光学系统记录到所述全息材料中。
70.进一步地,将所述原始相位数据107通过所述光学系统记录到全息材料12中时,先将所述原始相位数据107通过相位调制空间光调制器10上载,然后再通过光学系统将所述原始相位数据107记录到全息材料12中。
71.进一步地,将所述待检测相位数据傅里叶变换的所述频谱强度分布,经迭代计算得到检出所述相位数据时,先将所述待检测相位数据经过透镜102后,再将所述待检测相位数据傅里叶变换的频谱强度分布108,经迭代计算得到检出相位数据109。
72.进一步地,将所述待检测相位数据经过透镜102后,再将所述待检测相位数据傅里叶变换的所述频谱强度分布,经迭代计算得到所述检出相位数据109时,将傅里叶变换的所述频谱强度分布通过光电探测器15获得。
73.进一步地,将所述嵌入式数据105占所述原始相位数据107的比例进行调整。
74.进一步地,将所述嵌入式数据105占所述原始相位数据107的比例进行调整时,根据对数据转换速率、编码率和误码率等参数的要求进行调整。嵌入式数据105占比越高,相位检出精度越高,所需迭代次数越少。
75.进一步地,嵌入式数据105的排布方式可选择有规则的位置排布和随机的位置排布。
76.进一步地,将所述嵌入式数据105的相位编码选择有规则的相位分布或者随机的相位分布。随机的相位分布能够使得嵌入式数据105与未知相位数据106的频谱混叠效果提高。
77.进一步地,将所述嵌入式数据105的相位编码取值选择为与所述未知相位数据的相位编码取值相同或者不相同。
78.进一步地,将所述嵌入式数据105的空间频率选择为与所述未知相位数据的空间频率相同或者不相同。
79.进一步地,将所述嵌入式数据105构成的嵌入式数据105单元的光强度选择为与所述未知相位数据单元的光强度相同或者不相同。
80.进一步地,将所述嵌入式数据105的位置与所述未知相位数据的位置选择为相邻或者不相邻。
81.其中迭代计算步骤可以为:
82.第一步,给予待检测相位数据一个随机的初始猜测相位矩阵,然后利用嵌入式数
据对初始猜测矩阵进行更新,得到更新后的相位矩阵。
83.第二步,利用傅里叶变换计算更新后的相位矩阵的傅里叶变换频谱分布,在傅里叶面上得到一个复振幅分布(包含振幅和相位两部分),其中振幅由待测相位数据傅里叶变换的频谱强度分布的平方根替代,相位保持不变,形成一个更新的复振幅分布。计算更新后的复振幅分布的强度分布,与待检测相位数据傅里叶变换的频谱强度分布108做比较判断,如果两者差值比例小于设定阈值,则认为更新后的相位矩阵为待测相位数据,迭代结束;如果两者差值比例大于等于设定阈值,则继续进行下一步骤的迭代计算。
84.第三步,将更新的复振幅分布进行逆傅里叶变换计算,在物面上也得到一个复振幅分布,其中将振幅根据原始输入的振幅分布更新,相位由嵌入式数据进行更新,即再次产生更新后的相位矩阵,再继续进行第二步,直至迭代结束。
85.具体如图2所示,在编码阶段,将设计好的一定比例的嵌入式数据105与未知相位数据一同编入原始相位数据107中;原始相位数据107用空间光调制器10作为物面101上载,经过光学系统记录到全息材料12中,并在信息读取后,获得待检测相位数据。图2的模型中省略了记录材料和读取信息的光学系统,读取后的信息就是待检测相位数据,待检测相位数据与原始相位数据107呈4f系统,即待检测相位数据所在的物面101与原始相位数据107所在的傅里叶变换面103之间的距离为四倍的透镜102的焦距,待检测相位数据与原始相位数据107同在物面101,唯一不同之处在于待测相位数据具有材料读取导致的噪声;待检测相位数据经过透镜102后,其傅里叶变换的频谱强度分布由光电探测器15获得;经过迭代计算得到检出相位数据109。每次迭代后的傅里叶频谱108强度分布与原始相位数据107对应拍摄的傅里叶面频谱强度之间存在差异,随着迭代次数的增加,差异逐渐减小,当差异小到预设值或预设范围时,则可以认为满足停止迭代的条件,此时迭代后的相位分布应该认为是检出后的相位数据。在这个过程中,傅里叶面的强度差异是判断标准,可用傅里叶面强度误差率来表征。
86.以四阶相位编码0,π/2,π,3π/2为例,在不同嵌入式数据105比例下,傅里叶面强度误差率与迭代次数的曲线如图3所示,该曲线可以直观的显示相位检出收敛速度的快慢。可见,当嵌入式数据105比例较低时,例如嵌入式数据105比例为20%时,大约需要200次迭代才能收敛结束;而当嵌入式数据105比例提高时,收敛速度明显加快,这就是嵌入式数据105加快相位检出收敛速度的作用。
87.嵌入式数据105比例越高,不仅具有加速收敛的作用,还具有提高相位检出精度的作用,如表一所示。在四阶和八阶相位编码情况下,分别用不同嵌入式数据105比例情况进行相位检出;可见,当嵌入式数据105比例越高时,迭代次数和误码率越低。但同时嵌入式数据105比例越高,编码率越低,因此嵌入式数据105比例可以根据对数据转换速率、编码率和误码率等参数的具体要求进行调整。
88.表一 四阶和八阶相位编码在不同嵌入式数据105比例下的比较:
[0089][0090]
嵌入式数据105除了占比为重要参数外,其位置分布和编码分布也对相位检出具有影响。图4表示嵌入式数据105的位置分布,黑色部分为嵌入式数据105,白色部分为未知相位数据106,嵌入式数据105可以呈规则位置分布也可呈随机位置分布。规则位置分布的优势是编码放置具有统一规则,因此在编码中很简单。随机位置分布的优势是能够避免一定几率的规则位置分布带来的频率周期性过强的问题。
[0091]
图5表示嵌入式数据105的相位编码分布,剖面线部分为具有颜色的嵌入式数据105,白色部分为未知相位数据106。以嵌入式数据105比例为50%、且嵌入式数据105位置有规律分布的情况为例,嵌入式数据105的相位编码分布可以是有规则的或者随机分布的。图6为傅里叶面上的频谱分布,有规则的相位分布会导致在傅里叶面上产生有规律的频谱分布,其优势是能够产生特征明显的频谱分布,能够用于定位和频谱特征提取,但其缺点是与未知相位数据106的频谱混叠程度不够。随机相位分布会导致在傅里叶面上产生随机的频谱分布,这与未知相位数据106的频谱分布相似,即也是随机的,因此频谱混叠程度较高,利于提高相位检出的迭代效率。综上,嵌入式数据105的位置分布和相位编码分布也需要根据具体的应用场景进行选择。
[0092]
嵌入式数据105的相位编码取值根据需要可选择与未知相位数据的相位编码取值相同或者不相同。例如,未知相位数据的相位编码取值为四阶0,π/2,π,3π/2,嵌入式数据105的相位编码取值既可以也取四阶相同相位0,π/2,π,3π/2,也可以取四阶任意不同相位如0,π/3,π/2,3π/2,也可以取任意阶不同相位如五阶0,π/3,π/2,π,3π/2。
[0093]
嵌入式数据105的空间频率根据需要可选择与未知相位数据的空间频率相同或者不相同。如图7所示,可见,嵌入式数据105的面积比未知相位数据106的面积大,即嵌入式数据105的空间频率比未知相位数据106的空间频率更低。
[0094]
嵌入式数据105单元的光强度根据需要可选择与未知相位数据单元的光强度相同或者不相同。图8为嵌入式数据105单元的光强度与未知相位数据106单元光强度不相同的示例,嵌入式数据105为黑色部分,未知相位数据106为白色部分,图9为图8中观测线104处的光强度得到的曲线图。其中,观测线104为图8中的横线。
[0095]
嵌入式数据105的位置根据需要可选择与未知相位数据的位置相邻或者不相邻。图10为嵌入式数据105位置与未知相位数据106位置不相邻的示例。
[0096]
上面结合附图对本实用新型进一步实施方式作了详细说明,但是本实用新型不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下做出各种变化。
[0097]
不脱离本实用新型的构思和范围可以做出许多其他改变和改型。应当理解,本实
用新型不限于特定的实施方式,本实用新型的范围由所附权利要求限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。