1.本发明涉及声音信号技术领域,具体涉及基于声音信号的立柱轴向力识别方法。
背景技术:
2.近年来,固有频率的测试方法受到了广泛的关注。通常,现有的测试方法可以分为两种:接触法和非接触法。接触法需要在组件中安装加速度计或位移传感器,由于传感器的质量影响,这种方法经常会产生不可避免的误差。作为替代方案,非接触式方法(例如基于激光的测试方法)具有更好的性能,因为它不需要在结构中安装传感器。但是基于激光的测试方法的成本通常非常昂贵。
技术实现要素:
3.为了解决传统方法中存在的不足和缺点,本发明提供了廉价且精度高的立柱轴向力识别方法。
4.为达成上述目的,本发明提供如下技术方案:基于声音信号的立柱轴向力识别方法,包括如下步骤:
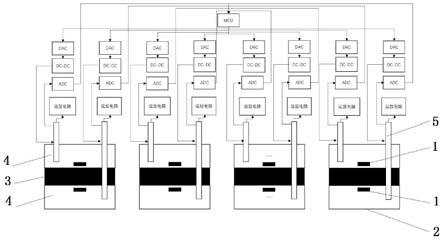
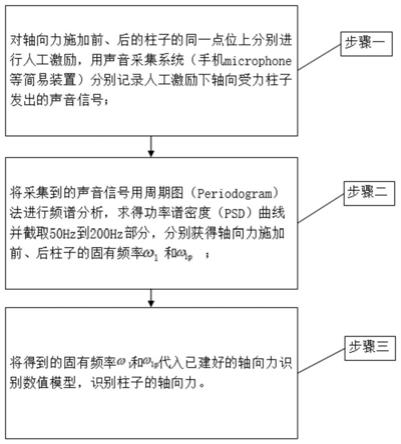
5.s1、分别对立柱在轴向力施加前和轴向力施加后的同一点位采用标准圆头铁锤进行人工激励,利用声音信号采集系统分别记录人工激励下立柱轴向受力前、后发出的声音信号;
6.s2、截取声音信号进行信号处理,导入matlab并通过周期图法进行频谱分析,求得功率谱密度曲线并在50-200hz的部分进行截取,分别获得立柱施加轴向力前、后的固有频率ω1和ω
1p
;
7.s3、将立柱施加轴向力前、后的固有频率ω1和l
1p
代入已构建完成的轴向力识别数值模型中,识别立柱的轴向力。
8.优选的,步骤s1中:
9.所述人工激励的点位为立柱的相对中点处。
10.所述声音信号采集系统的位置为距激励点位0.1m处。
11.所述标准圆头铁锤的重量为500g。
12.所述声音信号采集系统为手机或microphone;声音信号采集系统的采样频率为48000hz,声音信号格式为m4a。
13.所述声音信号采集的持续时间为3s,采集次数为3次。
14.优选的,步骤s2中:
15.截取的声音信号数据点数n为2^17。
16.截取功率谱密度曲线75-135hz的部分。
17.功率谱密度曲线的计算过程如下:
18.运用快速傅里叶变换计算功率谱密度,如下所示
[0019][0020]
如下获得离散功率谱密度
[0021][0022]
其中fs是声音采样频率;
[0023]
为方便显示,功率谱密度(psd)曲线转换如下
[0024]
psd=10
×
log
10
(p
xx
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0025]
优选的,步骤s3中,轴向力识别数值模型的构件过程如下:
[0026]
采用有限元模型分析构件的理论自振模态,将构件沿长度方向划分成若干个等长度的梁单元,则单元质量矩阵可表示为:
[0027][0028]
ρ表示构件的线密度,a为构件截面面积,l为有限元模型中单元的长度;
[0029]
对应的单元弯曲刚度矩阵可以表示为:
[0030][0031]
式中e为试样的弹性模量,i为试样的截面惯性矩;
[0032]
立柱在轴向力下的几何刚度矩阵为:
[0033][0034]
其中p是立柱的轴向力;假设s是式(6)中的不变项,可以表示为:
[0035]
[0036]
则式(6)可以改写为:
[0037]kp
=p
·sꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0038]
使用装配后的整体质量和刚度矩阵获得具有边界条件的立柱的自然模态;列的特征方程可以表示为:
[0039]
k0φ1=λ1mφ1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0040]
其中k0为整体刚度矩阵,m为整体刚度矩阵和质量矩阵,λ1为固有频率对应的一阶特征值,φ1为一阶振型;轴向力在列上的特征方程可以表示为:
[0041]
(k
0-kg)(φ1 δφ1)=(λ
1-δλ1)m(φ1 δφ1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0042]
其中kg为轴向力作用下对应的整体几何刚度,相对于公式(7),δλ1和δφ1分别为特征值λ1和模态形状φ1的变化量;从方程(10)可以看到,λ1和φ1与轴向力相关联;通常情况下,柱子处于弹性工作状态,则δφ1=0;因此,等式(10)可以表示为:
[0043]
(k
0-p
·
sg)φ1=(λ
1-δλ1)mφ1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0044]
其中sg是对应于轴向力等于1时的整体几何刚度矩阵;对式(11)左右等号两边左乘φ1的转置,可得:
[0045]
φ
1t
(k
0-pgsg)φ1=(λ
1-δλ1)φ
1t
mφ1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0046]
考虑到模态方程和的性质,方程(10)可以写成:
[0047]
λ
1-pgφ
1t
sgφ1=λ
1-δλ1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0048]
由式(13),立柱的轴向力p可以表示为:
[0049][0050]
假设在轴向力分别应用于柱子之前和之后的固有频率为ω1和ω
1p
,则公式(14)可以改写为:
[0051][0052]
轴向力p可以通过等式(15)与基本假设δφ1=0进行测定。
[0053]
本发明与现有技术相对比,其有益效果在于:通过非接触性装置采集声音信号并进行频谱分析,分别得到立柱施加轴向力前和立柱施加轴向力后的固有频率ω1和ω
1p
;将其带入已构建完成的轴向力识别数值模型中,识别立柱的轴向力。通过采用非接触的立柱轴向力识别方法,不会因附加质量产生测量误差,而且具有速度快,精度高,成本低廉等优点。
附图说明
[0054]
图1是本发明提供的基于声音信号的立柱轴向力识别方法的流程图。
[0055]
图2是本发明实施例中轴向力下钢柱的有限元模型。
[0056]
图3是本发明实施例中无轴向力状态的柱体声音信号测试固有频率:(a)-(c)声音信号时间关系曲线;(d)-(f)声音信号的psd估计。
[0057]
图4是本发明实施例中p=110kn下钢柱体声音信号测试固有频率:(a)-(c)声音信
号时间关系曲线;(d)-(f)声音信号的psd估计。
[0058]
图5是本发明实施例中p=230kn下钢柱体声音信号测试固有频率:(a)-(c)声音信号时间关系曲线;(d)-(f)声音信号的psd估计。
具体实施方式
[0059]
为了使本发明的目的、技术方案及优点更加清楚明白,下面通过实施例本发明作进一步具体的说明。
[0060]
实施例
[0061]
本实施例提供了基于声音信号的立柱轴向力识别方法,如图1所示,包括如下步骤:
[0062]
步骤一,分别对型钢构件立柱在轴向力施加前和轴向力施加后的同一点位采用标准圆头铁锤进行人工激励,利用声音信号采集系统分别记录人工激励下立柱轴向受力前、后发出的声音信号,声音信号采集持续3秒,并将声音采集操作3次,作为基线;
[0063]
步骤二,从声音采集装置截取的数据点数n为2^17进行信号处理,然后将它们导入matlab并通过周期图(periodogram)法进行频谱分析,求得功率谱密度(psd)曲线并截取50hz到200hz部分,分别获得立柱施加轴向力前、后的固有频率ω1和ω
1p
;
[0064]
步骤三,将立柱施加轴向力前、后的固有频率ω1和ω
1p
代入已构建完成的轴向力识别数值模型中,识别立柱的轴向力。
[0065]
在步骤一中,
[0066]
敲击的位置及方式:在型钢构件的中点处进行人工激励;
[0067]
声音采集系统的位置:距立柱激励点位0.1m处;
[0068]
标准圆头铁锤的规格:标准圆头铁锤重量约为500g;
[0069]
声音信号采集系统:手机、microphone等简易装置;采样频率为48000hz,声音信号格式为m4a。
[0070]
在步骤二中,从声音采集装置截取的数据点数n为2^17进行信号处理,然后将它们导入matlab并通过周期图(periodogram)法进行频谱分析,求得功率谱密度(psd)曲线,还包括:
[0071]
运用快速傅里叶变换(fft)计算功率谱密度(psd),如下所示
[0072][0073]
如下获得离散功率谱密度(psd)
[0074][0075]
其中fs是声音采样频率;
[0076]
为方便显示,功率谱密度(psd)曲线转换如下
[0077]
psd=10
×
log
10
(p
xx
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0078]
在步骤三中,轴向力识别数值模型的原理如下:
[0079]
采用有限元模型分析构件的理论自振模态,将构件沿长度方向划分成若干个等长度的梁单元,则单元质量矩阵可表示为:
[0080][0081]
ρ表示构件的线密度,a为构件截面面积,l为有限元模型中单元的长度;
[0082]
对应的单元弯曲刚度矩阵可以表示为:
[0083][0084]
式中e为试样的弹性模量,i为试样的截面惯性矩。
[0085]
立柱在轴向力下的几何刚度矩阵为:
[0086][0087]
其中p是立柱的轴向力。假设s是式(6)中的不变项,可以表示为:
[0088][0089]
则式(6)可以改写为:
[0090]kp
=p
·sꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0091]
使用装配后的整体质量和刚度矩阵获得具有边界条件的立柱的自然模态。列的特征方程可以表示为:
[0092]
k0φ1=λ1mφ1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0093]
其中k0为整体刚度矩阵,m为整体刚度矩阵和质量矩阵,λ1为固有频率对应的一阶特征值,φ1为一阶振型。轴向力在列上的特征方程可以表示为:
[0094]
(k
0-kg)(φ1 δφ1)=(λ
1-δλ1)m(φ1 δφ1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0095]
其中kg为轴向力作用下对应的整体几何刚度,相对于公式(7),δλ1和δφ1分别为特征值λ1和模态形状φ1的变化量。从方程(10)可以看到,λ1和φ1与轴向力相关联。通常情况下,柱子处于弹性工作状态,则δφ1=0。因此,等式(10)可以表示为:
[0096]
(k
0-p
·
sg)φ1=(λ
1-δλ1)mφ1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0097]
其中sg是对应于轴向力等于1时的整体几何刚度矩阵。对式(11)左右等号两边左乘φ1的转置,可得:
[0098]
φ
1t
(k
0-pgsg)φ1=(λ
1-δλ1)φ
1t
mφ1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0099]
考虑到模态方程和的性质,方程(10)可以写成:
[0100]
λ
1-pgφ
1t
sgφ1=λ
1-δλ1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0101]
由式(13),立柱的轴向力p可以表示为:
[0102][0103]
假设在轴向力分别应用于柱子之前和之后的固有频率为ω1和ω
1p
,则公式(14)可以改写为:
[0104][0105]
轴向力p可以通过等式(15)与基本假设δφ1=0进行测定。
[0106]
算例分析
[0107]
图2为轴向力作用下钢柱的有限元模型,钢柱长1150mm。模型划分为23个单元,单元长度为50mm,钢柱的初始参数如表1所示,根据声音信号识别钢柱轴向力。(施加轴向力的方式为在轴向进行液压加载,为了对计算结果进行验证,安装了测力仪对轴向力进行测量。)表1试验钢柱初始参数
[0108][0109]
首先,分别对立柱在轴向力施加前和轴向力施加后的同一点位采用标准圆头铁锤进行人工激励,利用声音信号采集系统分别记录人工激励下立柱轴向受力前、后发出的声音信号,声音信号采集持续3秒,我们将声音采集操作3次,作为基线;
[0110]
其次,从声音采集装置截取的数据点数n为2^17进行信号处理,然后将它们导入matlab并通过周期图(periodogram)法进行频谱分析,求得功率谱密度(psd)曲线并截取75hz到130hz部分,如图3-5所示;
[0111]
其中图5(a)-(c)显示了图2中实验装置获得的声音信号的时程,我们将声音采集操作3次,作为基线,柱上没有施加轴向载荷,相应的psd曲线为图5(d)-(f)所示,得到钢柱稳定的固有频率ω1=107.7hz。
[0112]
图6(a)-(c)显示了轴向力p=110kn时声音信号记录的三个时间历程。图6(d)-(f)分别呈现了从相应声音分析中获得的psd结果。从图6的psd曲线可以看出,当p为110kn时,固有频率为100.8hz两次,100.7hz仅一次。该结果与有限元模型计算的固有频率相一致,可确定固有频率ω
1p
=100.8hz。
[0113]
图7(a)-(c)反映了轴向力p=230kn时声音信号记录的三个时间历程。从图7(d)-(f)的psd曲线可以看出,随着轴向力的增加,固有频率下降到94.3hz,即ω
1p
=94.3hz。
[0114]
最后,将钢柱施加轴向力前、后的固有频率ω1和ω
1p
代入已构建完成的轴向力识别数值模型中,识别立柱的轴向力,并于实际受力进行比对,如下表:
[0115]
表2测试柱af检测
[0116][0117]
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。