移动数字化x射线摄影设备和移动数字化x射线摄影系统
技术领域
1.本技术涉及医疗器械领域,尤其涉及一种移动数字化x射线摄影设备和具有所述移动数字化x射线摄影设备的移动数字化x射线摄影系统。
背景技术:
2.移动数字化x射线摄影(digital radiography,dr)设备是x射线类产品的一个子品类,移动dr设备具有便携性、可移动性、操作灵活、摆位方便、占地面积小等优势。但在不便于技术人员到场的使用场景,如偏远地区诊疗中,仍无法实现医患全程无接触诊疗。
技术实现要素:
3.本技术提供了一种移动数字化x射线摄影设备,包括第一移动机器人、第一操作端、第二移动机器人、第二操作端、主控制器和副控制器;第一操作端搭载于第一移动机器人,第一操作端包括球管装置和第一通信模块;第二操作端搭载于第二移动机器人,第二操作端包括平板探测器和第二通信模块;主控制器与副控制器中的一个搭载于第一移动机器人,主控制器与副控制器中的另一个搭载于第二移动机器人;主控制器与副控制器,通过第一通信模块与第二通信模块通信。
4.在主控制器搭载于第一移动机器人的情况下,主控制器向副控制器发送运动指令,副控制器用于根据主控制器发送的运动指令控制第二移动机器人运动至第一位置,主控制器还用于向第一移动机器人发送运动指令,以控制第一移动机器人运动至第二位置;主控制器还用于在第二移动机器人到达第一位置且第一移动机器人到达第二位置后,控制球管装置曝光发射x射线;平板探测器用于接收x射线。
5.或者,在主控制器搭载于第二移动机器人的情况下,主控制器用于向第二移动机器人发送运动指令,以控制第二移动机器人运动至第一位置;主控制器还用于向副控制器发送运动指令,副控制器用于根据主控制器发送的运动指令控制第一移动机器人运动至第二位置;主控制器还用于在第二移动机器人到达第一位置且第一移动机器人到达第二位置后,控制球管装置曝光发射x射线;平板探测器用于接收x射线。
6.其中,移动数字化x射线摄影设备包括第一运动机构和第二运动机构;第一运动机构搭载于第一移动机器人,第一运动机构用于在第一移动机器人上的主控制器或副控制器的控制下,带动球管装置做升降运动;第二运动机构搭载于第二移动机器人,第二运动机构用于在第二移动机器人上的副控制器或主控制器的控制下,带动平板探测器做升降运动。
7.其中,第一运动机构和第二运动机构的升降运动为同步运动。
8.其中,第一操作端还包括摄像头,摄像头与球管装置远离第一移动机器人的一侧固定连接;摄像头用于在第一移动机器人上的主控制器或副控制器的控制下拍摄图像。
9.其中,第一移动机器人和第二移动机器人均搭载有定位导航装置,用于向主控制器反馈自身位置。
10.其中,第一移动机器人与第二移动机器人均搭载有储能电池,储能电池用于为移
动数字化x射线摄影设备的运动和曝光供电。
11.其中,第二操作端还包括消毒装置,消毒装置与第二运动机构靠近平板探测器的一侧固定连接,消毒装置能旋转。
12.本技术实施例还提供了一种移动数字化x射线摄影系统,包括上述的移动数字化x射线摄影设备以及远程端;远程端用于与主控制器通信,以远程控制移动数字化x射线摄影设备工作。
13.本技术实施例的移动数字化x射线摄影系统具有的远程端和移动数字化x射线摄影设备能够相互协同配合,适应多种地形环境,在操作技师和受检者全程无接触的情况下完成光片的拍摄,且具有消毒的功能,能够保障操作技师和受检者的安全,完成医疗任务。
附图说明
14.为更清楚地阐述本技术的构造特征和功效,下面结合附图与具体实施例来对其进行详细说明。
15.图1是本技术实施例移动数字化x射线摄影系统的结构示意图;
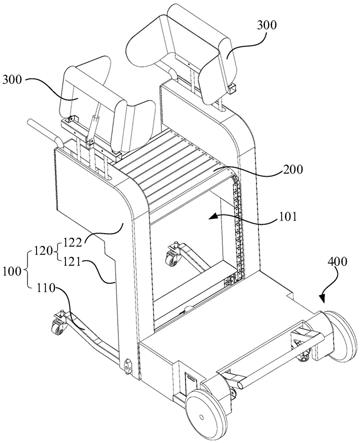
16.图2是本技术实施例移动数字化x射线摄影设备的结构示意图;
17.图3是本技术实施例的第一单元的结构示意图;
18.图4是本技术实施例的第二单元的结构示意图;
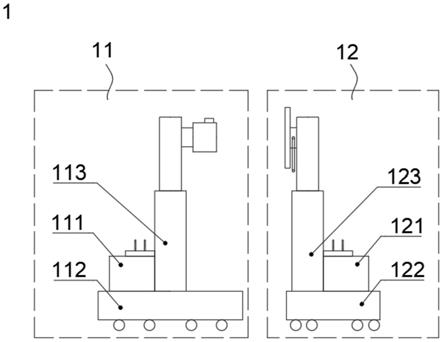
19.图5是本技术实施例移动数字化x射线摄影系统的工作原理示意图。
具体实施方式
20.下面将结合本技术实施例的附图,对本技术实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本技术的一部分实施例,而不是全部实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本技术保护的范围。
21.本技术实施例提供一种移动数字化x射线摄影(digital radiography,dr)系统100,能够实现医患全程无接触的情况下,为用户拍摄x光片。
22.如图1所示,移动dr系统100包括移动dr设备1和远程端2。其中移动dr设备1可以在远程端2的操控下拍摄x光片。
23.如图2所示,移动dr设备1包括第一单元11和第二单元12。
24.第一单元11包括第一移动机器人112、第一操作端113和主控制器111。
25.第一移动机器人112作为第一单元11的运动部件,最大载重可达400公斤,受到主控制器111的运动控制,能够搭载第一操作端113和主控制器111。
26.本实施例中,第一移动机器人112内部可以搭载定位导航装置以及传感器等单元模块,检测并适应所处环境,将第一移动机器人112自身所处的定位信息时刻反馈至主控制器,自动定位、自动规划合适的路径,在行走过程中能够自动避障。第一移动机器人112还可以与云端网络连接,向电梯的控制系统或门锁的控制系统传递信号,实现自主乘梯和自主开门等动作。第一移动机器人112不仅限于上述功能,可以根据需要增加第一移动机器人112的功能模块,以拓展第一移动机器人112的功能。
27.如图3所示,第一操作端113具有升降功能,能够运动至合适高度,并曝光发射x光
线。第一操作端113可以包括第一运动机构113b和球管装置113a。第一运动机构113b可以是由若干部件组装,第一运动机构113b可以实现升降运动。球管装置113a可以固定在第一运动机构113b的顶端,并位于第一运动机构113b的一侧。球管装置113a能够曝光并发射x射线,球管装置113a具有束光器,通过调整束光器能够调整球管装置113a发射x光线的光野大小,光野大则球管装置113a发射x光线覆盖的范围大,光野小则球管装置113a发射x光线覆盖的范围小。
28.如图3和图5所示,第一操作端113还可以包括摄像头装置113d,摄像头装置113d可以固定在球管装置113a上。移动dr设备1工作时,摄像头装置113d用于采集受检者的位置,以供远程端2的操作技师观察受检者是否到达拍摄位置,从而实现医患远程可视化交互的作用(下文将继续说明)。在其他实施例中,摄像头装置113d的位置可以根据需要设计,不限于上文所述,或者根据产品需要,也可以不设摄像头装置113d。
29.如图3所示,第一操作端113还可以包括第一通信模块113c,第一通信模块113c用于与外界(包括远程端2和下文所述的第二通信模块)通信。
30.移动dr设备1的第一操作端113还可以具有智能交互模块,智能交互模块接入互联网云端和医学影像信息系统(picture archiving and communication systems,pacs),能够通过身份验证,如扫描“健康码”身份证等个人信息建立患者档案,实现检查信息和pacs系统的互通。第一操作端还可以具备显示面板和语音系统,能够多途径实现与受检者的沟通,与摄像头装置113d共同配合起到可视化交互的作用。
31.如图2和图3所示,主控制器111用于控制第一移动机器人112运动,根据任务所需的指定地点以及第一移动机器人112自身搭载的定位导航装置提供的位置反馈,主控制器111 能够为第一移动机器人112规划合适路径。在运动至指定地点的途中,如果有障碍物,主控制器111还能及时的根据第一移动机器人112搭载的传感器的反馈,实时更改运动指令,实现避障功能。第一移动机器人112到达指定地点后,主控制器111根据第一移动机器人112 搭载的传感器,分析周围环境,同时结合第二单元12通过第一通信模块113c向主控制器111 反馈的第二单元12的第一位置和第一高度(下文将会提到),为第一单元11规划第二位置和第二高度,其中,第二位置为第一移动机器人112需要到达的指定拍摄位置,第二高度为第一运动机构113b需要到达的指定拍摄高度,移动dr设备1会随着受检地点和受检者的实际情况做出适应性调整,计算得出因地制宜、因人而异的第二位置和第二高度。第一移动机器人112运动至第二位置后,主控制器111再控制第一运动机构113b运动至第二高度,使得球管装置113a到达指定拍摄高度后,主控制器111再控制球管装置113a曝光发射x光线。
32.在其他实施例中,主控制器111也可以设在第二单元12中。
33.如图2所示,第二单元12包括副控制器121、第二移动机器人122和第二操作端123。
34.如图4所示,第二移动机器人122可以与第一移动机器人112为同型号机器人,功能模块与第一移动机器人112功能近似相同。第二移动机器人122通过副控制器121也受到主控制器111的控制,第二移动机器人122能够搭载副控制器121、第二移动机器人122和第二操作端123。
35.如图2和图4所示,第二操作端123能够与第一操作端113的配合,运动至合适的高度后,接收第一操作端113发射的x光线。第二操作端123可以包括第二运动机构123b和平板
探测器123a。第二运动机构123b可以是由若干部件组装,第二运动机构123b可以实现升降运动。平板探测器123a与第二运动机构123b的顶端固定连接,位于第二运动机构123b的一侧;平板探测器123a受控于副控制器121,能够接受球管装置113a曝光发射的x射线,并将其转化为数字信号,获得数字矩阵并传输给主控制器111处理,从而构成图像。
36.如图4所示,第二操作端123的平板探测器123a还具备无线传输的功能,能够将拍摄图像自动发送至主控制器111和远程端2;平板探测器123a的成像视野大于等于43cm
×
43cm,像素矩阵不小于3072
×
3072,其中像素尺寸≤139μm,平板探测器123a的空间分辨率≥ 3.51p/mm。
37.如图4所示,本实施例中,第二操作端123还可以包括第二通信模块123c,第二通信模块123c用于与外界(包括远程端2和上文所述的第一通信模块113c)通信。
38.如图4所示,第二操作端123还可以包括消毒装置123d,消毒装置123d与第一运动机构113b靠近平板探测器123a的一端固定连接,可以绕平板探测器123a运动,能够实现多角度、无死角的为平板探测器123a消毒,防止受检者之间造成交叉感染。在其他实施方式中,消毒装置123d不仅限于绕平板探测器123a运动,还可以为其他的运动形式,例如可以是绕第二运动机构123b运动,多角度实现对平板探测器123a的消毒。
39.如图2和图4所示,副控制器121可以设于第二移动机器人122上,用于接受主控制器 111的控制命令,主控制器111根据任务所需的指定地点以及第二移动机器人122自身搭载的定位导航装置提供的位置反馈,主控制器111能够为第二移动机器人122规划合适路径,然后通过第一通信模块113c与第二通信模块123c向副控制器传输运动至指定地点的路径指令,副控制器121分析该路径指令,控制第二移动机器人122到达指定地点。在运动至指定地点的途中,如果有障碍物,主控制器111还能及时的根据第二移动机器人122搭载的传感器的反馈,实时更改运动的路径指令并传递给副控制器121,实现避障功能。第二移动机器人122到达指定地点后,主控制器111根据第二移动机器人122搭载的传感器,分析周围环境得出第二移动机器人122需要到达的第一位置和第二运动机构123b需要到达的第一高度,将位置指令和高度指令传递给副控制器121,副控制器121分析指令并控制第二移动机器人 122和第二运动机构123b工作,其中,第一位置为第二移动机器人122需要到达的指定拍摄位置,第一高度为第二运动机构123b需要到达的指定拍摄高度,移动dr设备1会随着受检地点和受检者的实际情况做出适应性调整,计算得出因地制宜、因人而异的第一位置和第一高度。第二移动机器人122运动至第一位置后,主控制器111再通过副控制器121控制第二运动机构123b运动至第一高度,使得平板探测器123a到达指定地点能够接收球管装置113a 发出的x射线。主控制器111控制球管装置113a能够曝光发射x射线,发出的x射线穿过人体将影像投射于平板探测器123a上,平板探测器123a接收并将其转化为数字信号,获得数字矩阵并传输给主控制器111处理,从而生成图像。
40.在其他实施例中,副控制器121也可以设于第一移动机器人上。
41.主控制器111控制下的第一运动机构113b与第二运动机构123b经过初步定位(即第一运动机构113b到达第二高度,第二运动机构123b到达第一高度)以后的运动都为同步升降运动,便于球管装置113a能时刻保持与平板探测器123a的中心自动跟踪对齐,从而提高对位精度,减少受检者辐射伤害。
42.移动dr设备1的动力来源主要为储能电池,第一移动机器人112和第二移动机器人
2全程控制移动dr设备1可以灵活的应对复杂的地形环境,便于在移动dr设备1无法自主应对当前环境时,有备用的解决方案。
48.本技术实施例中,远程端2能够与移动dr设备1建立无线通信,从而能够远程控制移动 dr设备1,实现操作技师与受检者全程无接触的情况下完成拍摄检查。
49.本技术实施例中,第二操作端123具有消毒装置123d,消毒装置123d能够在受检者离开后,对于平板探测器123a喷洒消毒液进行消杀工作,防止受检者之间造成交叉感染。
50.本技术实施例中,球管装置113a的曝光拍摄由远程端2的操作技师控制,并非由主控制器111控制自动拍摄,避免不必要的曝光对受检者造成额外伤害,提高检查的成功率和准确性。
51.在本次新冠肺炎的疫情中,对于肺部肺炎的影像诊断也是重要的参考依据之一,本技术实施例的移动dr系统100具有的远程端2和移动dr设备1能够相互协同配合,在操作技师和受检者全程无接触的情况下完成光片的拍摄,且具有消毒的功能,因此本移动dr设备1能够保障操作技师和受检者的安全,完成医疗任务。
52.在其他实施例中,主控制器111搭载于第二移动机器人122,副控制器121搭载于第一个移动机器人112,主控制器111向第二移动机器人122发送运动指令,以控制第二移动机器人122运动至第一位置;受检者到达检测位置,主控制器111控制第二运动机构到达第一高度后,主控制器111再向副控制器121发送运动至第二位置和第二高度的运动指令,副控制器121根据主控制器111发送的运动指令控制第一移动机器人112运动至第二位置,再控制第一运动机构运动至第二高度,使得球管装置113a与平板探测器123a的中心对齐后完成曝光拍摄。
53.本技术实施例还提供了一种控制移动dr设备1拍摄x光片的方法,结合图1-图5,该控制方法包括如下步骤:
54.步骤一:主控制器111接收远程端2发出的到达指定地点全自动拍摄x光片的命令,主控制器111向第一移动机器人112和第二移动机器人122发送运动至指定地点的运动指令。
55.主控制器111接收远程端2发出的运动至指定地点的指令后,根据第一单元11的定位信息规划第一移动机器人112的运动路线,同时通过第一通信模块113c向第二通信模块123c 发送到达指定地点的运动指令,副控制器121接收运动指令后,根据第二单元12的定位信息,规划第二移动机器人122的运动路线。
56.步骤二:第一单元11和第二单元12行驶至指定地点。
57.第一移动机器人112和第二移动机器人122在运动过程中,沿规划路线行走至指定地点。同时,第一移动机器人112和第二移动机器人122具有避障功能和自主乘梯功能。移动dr设备1如在行走中遇见障碍物时,实时更改路线实现避障。移动dr设备1如遇需更换楼层到达指定地点时,主控制器111通过第一通信模块113c向电梯的控制器发送乘梯指令,从而控制电梯停靠当前楼层和到达目标楼层。
58.步骤三:第二移动机器人122到达第一位置。
59.移动dr设备1到达指定地点后,主控制器111根据传感器的反馈判断指定地点的环境,分析得出受检者的最佳检测位置后,再根据最佳检测位置得出第二移动机器人122需到达的第一位置,第二移动机器人122根据计算结果到达第一位置。
60.步骤四:第二运动机构123b达到第一高度。
61.第二移动机器人122到达第一位置以后,受检者位于平板探测器123a前,根据受检者的受检部位和受检者的实际生理情况,主控制器111计算并通过副控制器121控制使得第二运动机构123b做升降运动到达第一高度,使得受检者的受检部位位于平板探测器123a的中心。同时,副控制器121通过第二通信模块123c和第一通信模块113c的通信将实际到达的第一位置和第一高度发送至主控制器111。
62.步骤五:第一移动机器人112到达第二位置,第一运动机构113b到达第二高度。
63.第二移动机器人122到达第一位置和第二运动机构123b到达第一高度后,主控制器111 根据受检者的受检部位和受检者的实际生理情况,计算得出第一单元11和第二单元12的拍摄距离,进而得出第一单元11所需到达的第二位置和第二高度并向第一移动机器人112发送运动指令;待第一移动机器人112的到达第二位置后,主控制器111再控制第一运动机构113b 到达第二高度,使得球管装置113a的中心与平板探测器123a的中心对准,以保证拍摄质量。后续如需调整拍摄高度,则使得第一运动机构113b和第二运动机构123b同步运动,以保持球管装置113a和平板探测器123a的中心自动追踪对齐,从而提高对位精度,减少受检者辐射伤害。
64.步骤六:球管装置113a调整合适的光野大小。
65.受检者位于平板探测器123a前,球管装置113a的束光器发出光线照射在受检者的受检部位,调节球管装置113a的束光器,使其发出的光线范围能够完全覆盖受检者的受检部位和平板探测器123a,保证拍摄质量。
66.步骤七:远程端2通过主控制器111控制球管装置113a曝光发射x射线,平板探测器 123a接收拍摄影像并回传。
67.远程端2通过第一通信模块113c向主控制器111发送曝光拍摄的指令,主控制器111控制球管装置113a曝光发出x射线,平板探测器123a接收x射线并将其转化为数字信号,获得数字矩阵并传输给主控制器111处理,从而生成图像。主控制器111可以将该图像发送至远程端2。
68.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,第本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。