1.本发明涉及医疗康复器具技术领域,尤其提供一种移位车。
背景技术:
2.患病卧床的患者在下床活动时,需要自床榻上被转移至轮椅上。而在此过程中,通常需要借助一人甚至是多人的帮扶,以将病患的身体自床榻上移挪至轮椅上。
3.目前,人口老龄化已成为中国现阶段乃至21世纪的重要国情。据权威数据显示,至2018年末,中国60周岁及以上老年人已达2.49亿,占总人口的17.9%,比上一年度提高0.6%。预计本世纪中叶,中国60岁及以上老年人口接近5亿,将占总人口35%左右。
4.因此,由于人口老龄化,适龄劳动力人口下降,帮扶人员的用工成本高,传统依靠帮扶人员挪动患者至轮椅上的工作方式,存在着人力成本高的问题。
技术实现要素:
5.本发明的目的在于提供一种移位车,旨在解决现有靠帮扶人员挪动使用者到轮椅上而导致人力成本高的问题。
6.为实现上述目的,本发明提供了一种移位车,包括:
7.机架,所述机架具有用于供使用者通过的通道、坐垫工作位和坐垫收纳位,所述坐垫工作位位于所述通道的中部,所述坐垫收纳位位于所述通道的旁侧;
8.坐垫,所述坐垫活动安装于所述机架内,并可于所述坐垫工作位和所述坐垫收纳位之间移动,当所述坐垫位于所述坐垫收纳位时,所述坐垫离开所述通道,以使所述通道畅通;
9.扶手机构,所述扶手机构可升降地安装于所述机架,且所述扶手机构位于所述通道的侧部;以及
10.行走机构,所述行走机构安装于所述机架的底部。
11.在其中一个实施例中,所述移位车还包括第一驱动机构,所述第一驱动机构包括第一驱动源和传动机构,所述第一驱动源安装于所述机架上,所述第一驱动源通过所述传动机构驱动所述坐垫移动。
12.在其中一个实施例中,所述坐垫收纳位位于所述通道的底部,所述传动机构包括柔性传动件,所述柔性传动件绕设在所述机架的侧部,所述柔性传动件的一端位于所述坐垫工作位,所述柔性传动件的另一端位于所述坐垫收纳位,所述坐垫为柔性垫,所述柔性垫与所述柔性传动件连接。
13.在其中一个实施例中,所述柔性传动件为链条,所述柔性垫包括若干个链板,若干个所述链板依次相邻地与所述链条连接。
14.在其中一个实施例中,所述扶手机构包括扶手部和升降组件,所述升降组件包括第二驱动源,所述第二驱动源安装于所述机架上,所述第二驱动源的输出端与所述扶手部连接,以驱动所述扶手部升降。
15.在其中一个实施例中,所述扶手部与所述第二驱动源的输出端可转动连接。
16.在其中一个实施例中,所述扶手机构还包括两个夹板,两个所述夹板分别位于所述扶手部的前后两侧,且所述夹板朝靠近所述通道方向延伸。
17.在其中一个实施例中,所述机架包括底座和两个支架,两个所述支架间隔设置于所述底座上,两个所述支架之间的间隔形成所述通道,所述支架包括竖直部和连接于所述竖直部顶端的水平延伸部,所述扶手机构安装于所述水平延伸部;当所述坐垫位于所述坐垫工作位时,所述坐垫位于两个所述水平延伸部之间。
18.在其中一个实施例中,所述移位车还包括脚踏板,所述脚踏板可升降地安装于所述机架,所述脚踏板与所述扶手机构同步升降。
19.在其中一个实施例中,所述行走机构包括第一万向轮、固定脚轮和转向组件,所述第一万向轮安装于所述机架的后端,所述固定脚轮安装于所述机架的前端,所述转向组件包括第一连接件、第二万向轮和操控杆,所述第一连接件的中部可转动地安装于所述机架,所述第一连接件的一端与所述操控杆连接,所述第一连接件的另一端与所述第二万向轮连接,所述第二万向轮位于所述机架的前端。
20.在其中一个实施例中,所述移位车还包括控制器和传感器,所述传感器安装于所述机架,所述传感器用于检测所述使用者是否进入所述通道,所述控制器与所述传感器电连接,所述控制器用于根据所述传感器的检测结果控制所述坐垫移动至所述坐垫工作位或所述坐垫收纳位。
21.本发明的有益效果:本发明提供了一种移位车,通过行走机构移动至使用者的床边,调节坐垫处于坐垫收纳位,升高扶手机构至使用者的腋下,再调节坐垫处于坐垫工作位,从而使用者能够在随着扶手机构的下降而直接坐在位于通道中的坐垫上,实现将使用者从床铺转移至移位车上,减少了帮扶人员的工作量,降低了人力成本。
附图说明
22.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
23.图1为本发明实施例提供的移位车的结构示意图;
24.图2为图1中当坐垫位于坐垫收纳位的所述移位车的结构示意图;
25.图3为使用者准备转移至移位车的结构示意图;
26.图4为使用者已经转移至移位车的结构示意图;
27.图5为图1中所述移位车的内部结构示意图;
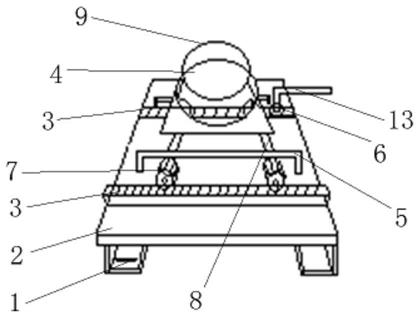
28.图6为图5中的a处放大图;
29.图7为图5中的b处放大图。
30.其中,图中各附图标记:
31.100—机架,101—通道,102—导套,110—底座,120—支架,121—竖直部,122—水平延伸部,123—推杆,130—脚踏板;
32.200—坐垫,210—链板;
33.300—扶手机构,310—扶手部,321—第二驱动源,322—导柱,330—夹板,340—第一缓冲器;
34.400—行走机构,410—第一万向轮,420—固定脚轮,430—转向组件,431—第一连接件,432—第二万向轮,433—操控杆,434—第二连接件,435—第二缓冲器;
35.500—第一驱动机构,510—第一驱动源,520—传动机构,521—柔性传动件,522—传动杆;
36.600—使用者。
具体实施方式
37.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
38.在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
39.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
40.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
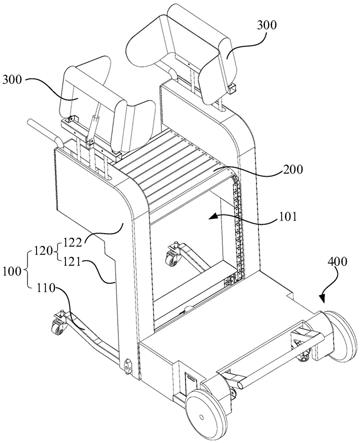
41.请参考图1,本发明提供了一种移位车,包括机架100、坐垫200、扶手机构300和行走机构400,机架100具有通道101、坐垫工作位和坐垫收纳位。通道101用于供使用者600通过。坐垫工作位位于通道101的中部,坐垫收纳位位于通道101的旁侧。可选地,坐垫收纳位可位于通道101的顶侧、底侧、左侧或右侧。坐垫200活动安装于机架100内,并可于坐垫工作位和坐垫收纳位之间移动。扶手机构300可升降地安装于机架100,且扶手机构300位于通道101的侧部。行走机构400安装于机架100的底部。
42.其中,请参考图2,当坐垫200位于坐垫收纳位时,坐垫200离开通道101,以使通道101畅通,从而使用者600可以方便地进入通道101。请参考图1,当坐垫200位于坐垫工作位时,坐垫200水平位于通道101的中部,方便进入该通道101内的使用者600坐在坐垫200上休息。
43.上述移位车的使用方法是:第一,请参考图3,使用者600坐在床铺边缘,移位车通过行走机构400移动至使用者600的床边,坐垫200位于坐垫收纳位,从而不会阻挡使用者600进入通道101;第二,扶手机构300升高至使用者600的腋下,起到搀扶使用者600的作用,
使得使用者600的臀部能够离开床面,当使用者600在扶手机构300的搀扶下进入通道101后,坐垫200调节至坐垫工作位(可参见图1);第三,请参考图4,使用者600随着扶手机构300的下降,其臀部下移至位于通道101中的坐垫200上,从而实现从床铺转移至移位车上。
44.如此,本发明提出的移位车技术方案,能够减少帮扶人员的工作量,甚至无需帮扶人员协助便能自动将使用者600从床铺转移至移位车上,从而减少了帮扶人员的用工量、甚至无需聘请帮扶人员,降低了人力成本。
45.在上述的实施例中,坐垫200活动安装在机架100上的方式很多。
46.比如,坐垫200为可伸缩坐垫200。当使用者600需要进入通道101时,坐垫200收缩到机架100内,如卷绕在机架100上;当使用者600进入通道101后,坐垫200伸入通道101内,并且坐垫200的两端固定在机架100上,以使坐垫200呈水平展开状态。
47.再比如,坐垫200可翻转地安装在机架100上,当使用者600需要进入通道101,则将坐垫200向下翻转至贴合机架100的侧壁,即处于坐垫收纳位;当使用者600需要坐垫200支撑,则将坐垫200向上翻转至水平状态,以供使用者600乘坐,即处于坐垫工作位。
48.在其中一个实施例中,请参考图1和图5,移位车还包括第一驱动机构500。第一驱动机构500包括第一驱动源510和传动机构520,第一驱动源510可固定安装在机架100上,第一驱动源510通过传动机构520驱动坐垫200移动。当使用者600需要进入通道101,则第一驱动机构500驱动坐垫200移动至坐垫收纳位(可参见图5),不会阻挡到使用者600进入通道101。当使用者600进入通道101后,需要坐垫200支撑,则第一驱动源510通过传动机构520带动坐垫200运动至坐垫工作位,方便使用者600坐立(可参见图1)。
49.可选地,第一驱动源510可以是自动地通过传动机构520驱动坐垫200移动,也可以是手动地通过传动机构520驱动坐垫200移动。比如,第一驱动源510为手轮,操作人员通过手动旋转手轮,提供旋转力,从而通过传动机构520带动坐垫200移动。再比如,第一驱动源510为电机、气缸、油缸等等,能够根据控制信号,提供驱动力,提供传动机构520带动坐垫200移动。
50.具体地,参见图5,坐垫收纳位位于通道101的底部。传动机构520包括柔性传动件521,柔性传动件521绕设在机架100的侧部,柔性传动件521的一端位于坐垫工作位,柔性传动件521的另一端位于坐垫收纳位,坐垫200为柔性垫,柔性垫与柔性传动件521连接。柔性垫具有能弯曲的特性,能够随着柔性传动件521做曲线运动,便于在空间狭小的机架100上自如地移动。
51.其中,柔性传动件521为链条,柔性垫包括若干个链板210,若干个链板210依次相邻地与链条连接。链条的传动方式较为稳定,不易打滑。若干个依次相邻的链板210组成坐垫200,使得坐垫200具有柔性,能够随着链条弯曲移动。
52.可选地,柔性传动件521还可以是皮带,柔性垫还可以是布垫。
53.具体地,柔性传动件521为两个。传动机构520还包括传动杆522,传动杆522的中部与第一驱动源510的输出端连接,以驱动传动杆522旋转。传动杆522的两端分别与柔性传动件521的一端连接,从而带动两个柔性传动件521同步转动。
54.可以理解,在其他实施例中,第一驱动机构500可选为升降平台,坐垫200安装在升降平台的顶部,升降平台带动坐垫200在坐垫工作位至坐垫收纳位之间做往复直线运动。
55.在其中一个实施例中,参见图5和图6,扶手机构300包括扶手部310和升降组件,升
降组件包括第二驱动源321,第二驱动源321安装于机架100上,第二驱动源321的输出端与扶手部310连接,以驱动扶手部310升降,从而扶手部310可上升至使用者600的腋下,并搀扶使用者600下移。
56.可选地,第二驱动源321可以是自动地或手动地驱动扶手部310升降。比如,第二驱动源321为手轮,操作人员通过手动旋转手轮,提供旋转力,从而驱动扶手部310升降。再比如,第二驱动源321为电机、气缸、油缸等等,能够根据控制信号,提供驱动力,驱动扶手部310升降。
57.具体地,参见图5和图6,升降组件包括导柱322,机架100还包括与导柱322相配合的导套102。导柱322上下滑动安装在导套102内,导柱322与扶手部310连接。导柱322对扶手部310的升降起到导向和支撑的作用。
58.具体地,扶手部310与第二驱动源321的输出端可转动连接,从而扶手部310的角度可调节,便于更好地支撑搀扶使用者600。比如,使用者600由站立姿势逐渐过渡为坐立姿势,双臂需要逐渐合拢,而扶手部310朝靠近通道101的方向转动,方便使用者600手臂合拢;再比如,扶手部310可转动,从而能够满足不同身高体型的使用者600的搀扶支撑需求。
59.具体地,参见图5和图6,扶手机构300还包括第一缓冲器340。第一缓冲器340的一端与第二驱动源321的输出端连接,第一缓冲器340的另一端与扶手部310连接,从而扶手部310的转动过程更加平稳,有效保护使用者600的安全。
60.具体地,参见图5和图6,扶手机构300还包括两个夹板330。两个夹板330分别位于扶手部310的前后两侧,且夹板330朝靠近通道101方向延伸。如此,当扶手机构300上升至使用者600的腋下时,两个夹板330能够夹持支撑使用者600的胸部和背部,避免使用者600前后倾倒,有效保护使用者600的安全。
61.在其中一个实施例中,结合图1,扶手机构300为两个,两个扶手机构300分别位于通道101的两侧。两个扶手机构300能够左右两侧共同搀扶使用者600,保证使用者600的转移过程安全平稳。
62.在其中一个实施例中,请参考图1、图5和图7,机架100包括底座110和支架120,支架120为两个,两个支架120间隔设置于底座110上,两个支架120之间的间隔形成通道101。
63.具体地,参见图3、图5和图7,支架120包括竖直部121和连接于竖直部121顶端的水平延伸部122,扶手机构300安装于水平延伸部122。当坐垫200位于坐垫工作位时,坐垫200位于两个水平延伸部122之间。
64.水平延伸部122连接于竖直部121的顶端,从而水平延伸部122的下方悬空。结合图3,当使用者600坐在床边时,移位车通过行走机构400移动至使用者600的床边。图3显示移位车还可以继续朝使用者600靠近,直至竖直部121贴合到床边,水平延伸部122由于悬空,直接伸到使用者600的腋下,使用者600自动进入到机架100的通道101内,整个过程使用者600一动不动,无需向前迈步,减轻使用者600的负担。然后,扶手机构300上升,带动使用者600的臀部离开床面,接着,坐垫200移动至坐垫工作位,扶手机构300带动使用者600下降,则使用者600自动坐在坐垫200上。
65.具体地,结合图5,机架100还包括推杆123。推杆123的设置便于帮扶人员推动该移位车行走。
66.在其中一个实施例中,请参考图1、图5和图7,行走机构400包括第一万向轮410和
固定脚轮420。第一万向轮410安装于机架100的后端,固定脚轮420安装于机架100的前端。
67.具体地,结合图5和图7,行走机构400还包括转向组件430。转向组件430包括第一连接件431、第二万向轮432和操控杆433,第一连接件431的中部可转动地安装于机架100,第一连接件431的一端与操控杆433连接,第一连接件431的另一端与第二万向轮432连接,第二万向轮432位于机架100的前端。
68.如此,帮扶人员通过转动操控杆433,从而带动与操控杆433连接的第二万向轮432上升或下降。当第二万向轮432上升至高于固定脚轮420时,固定脚轮420和第一万向轮410位于地面上。当第二万向轮432低于固定脚轮420时,第一万向轮410和第二万向轮432位于地面上,方便移位车在小范围内转向,甚至是原地旋转,便于在狭小过道内通行及掉头。
69.具体地,转向组件430还包括驱动操控杆433转动的第一电机(图未示),从而移位车能够自动地原地旋转,无需帮扶人员协助。
70.具体地,结合图5和图6,转向组件430还包括第二连接件434和第二缓冲器435,第二连接件434的中部可转动地安装于机架100,第二连接件434的一端与第二万向轮432连接,第二连接件434的另一端与第二缓冲器435的一端连接,第二缓冲器435的另一端与机架100固定连接。第二缓冲器435使得移位车的转向过程安全平稳。
71.具体地,参考图1,移位车还包括第二电机,第二电机用于为行走机构400提供电能,从而移位车能够自动行走,节省人力。
72.在一些实施例中,移位车还包括刹车机构,刹车机构用于控制行走机构400停止行走。可选地,刹车机构为刹车闸,刹车闸与第一万向轮410或固定脚轮420中的至少一个连接,用于控制第一万向轮410或固定脚轮420停止转动。
73.在其中一个实施例中,移位车还包括控制器(图未示)和传感器(图未示),传感器安装于机架100,传感器用于检测使用者600是否进入通道101,控制器与传感器电连接,控制器用于根据传感器的检测结果控制坐垫200移动至坐垫工作位或坐垫收纳位。
74.如此,当传感器检测到使用者600即将进入通道101,则控制器控制坐垫200移动至坐垫收纳位,避免坐垫200阻碍使用者600进入通道101内。当传感器检测到使用者600已经进入到通道101内,则控制器控制坐垫200移动至坐垫工作位。
75.可选地,传感器为红外传感器、超声波传感器或视觉传感器。
76.具体地,控制器还包括信号接收单元,信号接收单元能够接收到外部发送过来的坐垫工作指令和坐垫收纳指令,从而控制器根据信号接收单元接收到的信号,控制坐垫200处于坐垫工作位或坐垫收纳位。
77.在一些实施例中,如图4所示,移位车还包括脚踏板130。脚踏板130可升降地安装于机架100。脚踏板130与扶手机构300同步升降。
78.具体使用时,请参考图3,使用者600坐在床铺边缘,移位车通过行走机构400移动至使用者600的床边,坐垫200位于坐垫收纳位,从而不会阻挡使用者600进入通道101,使用者600能够踩在脚踏板130上(参见图4)。
79.然后,扶手机构300升高至使用者600的腋下,搀扶使用者600使其离开床面,脚踏板130也上升,对使用者600起到支撑和托举的作用,避免使用者600的双腿悬空,避免悬空的双腿阻挡或干涉到坐垫200从坐垫收纳位移动至坐垫工作位。
80.接着,当使用者600在扶手机构300的搀扶下进入通道101后,坐垫200调节至坐垫
工作位(可参见图1)。
81.最后,请参考图4,使用者600随着扶手机构300的下降,其臀部下移至位于通道101中的坐垫200上,使用者600的双腿也随着脚踏板130下降,避免双腿悬空或晃动,实现从床铺转移至移位车上。
82.具体地,脚踏板130与扶手机构300同步升降方式很多。比如,脚踏板130与扶手机构300共用一个驱动源,从而一个驱动源能够带动脚踏板130与扶手机构300同步升降。再比如,移位车为脚踏板130与扶手机构300配置有单独的驱动源,二者的驱动源受上位控制器的控制而同步升降。
83.其中,同步升降是指大约同时升降,包括同一时刻共同升降,也包括在预设时间内二者动作同步,预设时间可选为三秒、五秒或七秒。
84.比如,扶手机构200上升后,在三秒内,脚踏板130也上升。扶手机构200开始下降后,在三秒内,脚踏板130也开始下降。
85.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。