1.本技术涉及试验空气动力学的技术领域,特别是一种在风洞中实现内埋武器0~180
°
翻转机动轨迹捕获试验的支撑系统。
背景技术:
2.机弹分离、级间分离、助推器分离以及头罩分离等多体分离问题是航空航天飞行器面临的关键技术问题。飞行器在多体分离过程中会出现复杂的多体干扰流动,在飞行器的研制过程中,如果分离方案设计不合理,会导致分离体发生碰撞或者运动失控的风险。当前,全向攻击能力是新一代空射导弹发展的趋势和方向,它要求导弹具备过失速越肩发射技术,即快速转弯飞行的能力。
3.轨迹捕获风洞试验技术作为一种先进的多体分离地面模拟技术,将风洞模型试验与飞行力学有机结合,其突出优点是预测的准确性高,能获得与全尺寸飞行试验数据基本一致的试验结果,能通过计算机软件在试验中模拟外挂复杂的分离条件(如助投力、外挂物本身的推力等)和特殊的飞行状态(如俯仰、爬升或加速飞行等),适应飞机某些包线飞行状态下的发射,能在试验中直接给出外挂分离轨迹,及时评定分离特性,必要时可随时修改有关参数进行试验。试验不仅可以得到全尺寸条件分离轨迹,还可以直接测量外挂物在分离轨迹各测量点上的气动载荷,有利于外挂分离特性的分析和改进研究。因此,捕获轨迹试验是空射武器型号定型前必须开展的风洞试验类型。
4.受限于机构自身的运动能力和作动空间,现有的轨迹捕获风洞试验支撑系统借助接力技术通常只能实现攻角方向不超过90
°
的运动,不具备0~180
°
的试验模拟能力,无法满足导弹分离后过失速越肩发射的试验需求,因此迫切需要发展相应模拟能力,以拓宽这类试验技术的使用范围,本发明正是在这样的实际背景下提出的。
技术实现要素:
5.为了满足导弹分离后过失速越肩发射的轨迹捕获风洞试验需求,本发明提供一种在风洞中实现内埋武器0~180
°
翻转机动轨迹捕获试验的支撑系统,能在轨迹捕获风洞试验中,通过接力方式实现导弹过失速越肩发射过程的风洞模拟,并对头撑引起的模型外形破坏及支撑干扰提出了修正的方法和具体措施。
6.本技术采用如下的技术方案:
7.一种用于内埋武器轨迹捕获试验大机动模拟的支撑系统,包括导弹模型、置于导弹模型内部的应变天平、与应变天平两端连接的用于不同分段攻角范围的尾撑机构和头撑机构、用于修正头撑机构干扰的腹撑系统和腹撑带假头撑系统;
8.尾撑机构用于0~-90
°
攻角范围的试验,头撑机构用于-90
°
~-180
°
攻角范围的试验;
9.尾撑机构连接于应变天平朝向导弹模型尾部的一端,且从导弹模型的尾部伸出;头撑机构连接于应变天平朝向导弹模型头部的一端,且头撑机构从导弹模型的头部伸出。
10.所述应变天平用于测量试验过程中模型所受气动力,为轨迹捕获解算程序提供气动输入量。
11.在上述的支撑系统中,所述尾撑机构包括所适用分段攻角范围逐渐减小的尾直支杆和至少一个尾预弯支杆,头撑机构包括适用分段攻角范围逐渐减小的至少一个头预弯支杆和头直支杆;
12.尾直支杆、尾预弯支杆、头直支杆、头预弯支杆均包括直尾杆和支撑杆,直连杆和支撑杆之间连接有过渡段;
13.尾直支杆的直连杆与导弹模型同轴设置,且从导弹模型的尾部伸出,支撑杆与导弹模型之间的预置角为0;头直支杆的直连杆与导弹模型同轴设置,且从导弹模型的头部伸出,支撑杆与导弹模型之间的预置角为-180
°
;
14.尾预弯支杆的直连杆与导弹模型同轴设置,且从导弹模型的尾部伸出,支撑杆与导弹模型之间的预置角为0~-90
°
任意角度;头预弯支杆的直连杆与导弹模型同轴设置,且从导弹模型的头部伸出,支撑杆与导弹模型之间的预置角为-90
°
~-180
°
任意角度。
15.在上述的支撑系统中,所述0~-180
°
攻角范围,可任意角度分段为至少4个攻角范围,且随着攻角变小,应变天平依次连接尾直支杆、至少一个尾预弯支杆、至少一个头预弯支杆、头直支杆,不同攻角分段内,其对应的尾直支杆、尾预弯支杆、头预弯支杆到头直支杆的预置角在该攻角分段范围内。
16.优选的,所述不同攻角分段内,其对应的尾直支杆、尾预弯支杆、头预弯支杆到头直支杆的预置角为该攻角分段范围的中间值。
17.因此,攻角范围的分段数目和具体分段角度并不受限。
18.具体的,在所述0~-30
°
攻角范围内,尾直支杆与应变天平连接;在-30
°
~-90
°
攻角范围内,尾预弯支杆与应变天平连接,在-90~-120
°
攻角范围内,头预弯支杆与应变天平连接,在-120
°
~-180
°
攻角范围内,头直支杆与应变天平连接。
19.在上述的支撑系统中,所述每个头撑模型对应一组腹撑系统和腹撑带假头撑系统,腹撑系统包括腹撑模型6.1和腹撑支杆3.1,腹撑带假头撑系统包括腹撑带假头撑模型6.2和支杆3.2。
20.在设计时需考虑和导弹模型开孔不干涉。通过估算模型所受气动载荷及相应的弹性变形后确定支杆尺寸和导弹模型在腹连杆伸出位置的开口形式和尺寸,既要保证导弹模型在整个试验过程中与腹撑支杆不发生碰撞,又要保证尽可能减小对原导弹模型外形的破坏。
21.在上述的支撑系统中,亚跨声速试验时,所述假头撑突出导弹模型头部距离不小于导弹模型头部收口直径的3倍。
22.在上述的支撑系统中,超声速试验时,所述假头撑突出导弹模型的距离不小于头部收口直径的1.5倍。
23.在上述的支撑系统中,所述导弹模型在不同攻角分段之间的接力点处的三个方向的位移和三个方向的姿态角保持完全相同。
24.在上述的支撑系统中,所述直尾杆伸出导弹模型的长度不小于导弹模型底部直径的3倍。
25.直尾杆长度的限定是为了尽可能减小导弹模型底部的支撑干扰,不同声速实验条
件下假头撑长度的限定是为了能真实模拟头撑附近的流动情况。
26.具体的,所述直尾杆为等直段或近等直段。直尾杆为近等直段时,其渐变角小于1.5
°
。
27.在上述的支撑系统中,所述头部支撑干扰的修正步骤为:导弹模型采用头撑机构测得的气动量为c0,将头撑机构替换为腹撑系统,相同条件下测得的气动量为c1;再将腹撑系统替换为腹撑带假头系统,相同条件下测得的气动量为c2,修正后的气动量cr=c
0-(c
2-c1)。
28.综上所述,本技术包括以下至少一种有益技术效果:
29.1.本发明可在风洞轨迹捕获试验中实现导弹模型攻角方向0~-180
°
范围的变化,获得整个翻转机动过程的轨迹和姿态角变化,大大拓宽了试验能力,获得更完整的试验数据。
30.2.本发明在实现-90~-180
°
攻角范围试验时中采用了头撑模型的设计,发展了一种用腹撑系统、腹撑带假头系统组合的试验方法,进行头撑模型支撑干扰及头撑修型破坏的修正,保证了试验结果的可靠性和准确性。
附图说明
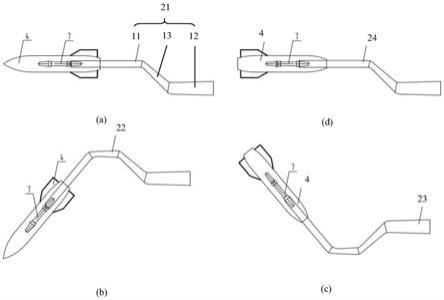
31.图1为本技术实施例一种实现0~-180
°
攻角翻转机动cts试验的支撑系统。
32.图2为头撑干扰修正的腹撑机构。
33.图3为典型轨迹捕获cts试验示意图。
34.附图标记说明:
35.11、直尾杆;12、支撑杆;13、连接段;
36.21、尾直支杆;22、尾预弯支杆;23、头预弯支杆;24、头直支杆;
37.3.1、腹撑支杆;3.2、腹撑带假头撑支杆;
38.4、导弹模型;
39.51、腹连杆;52、腹撑杆;53、假头撑;
40.6.1、腹撑模型;6.2、腹撑带假头撑模型;
41.7、应变天平;8、载机模型;
42.9、滚转运动机构;10、多自由度运动机构。
具体实施方式
43.下面结合附图1-3和具体实施例对本技术作进一步详细的描述:
44.在风洞试验过程中,载机模型8保持固定姿态,导弹模型4初始位置为导弹投放位置,待风洞流场稳定后,以应变天平7测量得到的导弹模型4气动载荷作为导弹六自由度动力学方程的载荷输入,解算导弹模型4下一时刻在风洞中的位置,并记录导弹相对飞机的全尺寸相对位移和相对姿态,通过末端多自由度机构带动尾直支杆21、应变天平7及导弹模型4运动到下一时刻位置后重复上述过程,捕获分离时间内的所有轨迹点。
45.受限于机构自身的运动能力和作动空间,现有的轨迹捕获风洞试验支撑系统借助接力技术通常也只能实现攻角方向不超过90
°
的运动,无法满足导弹分离后过失速越肩发射0~-180
°
攻角的试验需求。
46.本发明实施例公开一种在风洞中实现内埋武器0~180
°
翻转机动轨迹捕获试验的支撑系统。
47.参照图1和图2,一种用于内埋武器轨迹捕获试验大机动模拟的支撑系统,包括载机模型8、导弹模型4、内式应变五分量或六分量的应变天平7、与应变天平7两端连接的用于不同分段攻角范围的尾撑机构和头撑机构、与应变天平7连接的用于修正头部支撑干扰的修正系统,以及用于驱动导弹模型4实现准确滚转的滚转运动机构9和驱动导弹模型4运动的多自由度运动机构10。
48.尾撑机构连接于应变天平7朝向导弹模型4尾部的一端,且从导弹模型4的尾部伸出;头撑机构连接于应变天平7朝向导弹模型4头部的一端,且从导弹模型4的头部伸出。尾撑机构包括所适用分段攻角范围逐渐减小的尾直支杆21和至少一个尾预弯支杆22,头撑机构包括适用分段攻角范围逐渐减小的至少一个头预弯支杆23和头直支杆24;尾直支杆21、尾预弯支杆22、头预弯支杆23、头直支杆24均包括直尾杆11和支撑杆12,直连杆和支撑杆12之间连接有连接段13;尾直支杆21的直连杆与导弹模型4同轴设置,且从导弹模型4的尾部伸出,支撑杆12与导弹模型4之间的预置角为0;头直支杆24的直连杆与导弹模型4同轴设置,且从导弹模型4的头部伸出,支撑杆12与导弹模型4之间的预置角为-180
°
;尾预弯支杆22的直连杆与导弹模型4同轴设置,且从导弹模型4的尾部伸出,支撑杆12与导弹模型4之间的预置角为0~-90
°
任意角度;头预弯支杆23的直连杆与导弹模型4同轴设置,且从导弹模型4的头部伸出,支撑杆12与导弹模型4之间的预置角为-90
°
~-180
°
任意角度。直尾杆11伸出导弹模型4的长度不小于导弹模型4底部直径的3倍。
49.参照图2,每个头撑模型对应一组腹撑系统和腹撑带假头撑系统,腹撑系统包括腹撑模型6.1和腹撑支杆3.1,腹撑带假头撑系统包括腹撑带假头撑模型6.2和支杆3.2。腹撑模型6.1和腹撑带假头撑模型6.2均包括修正导弹模型以及位于修正导弹模型内的应变天平7,腹撑支杆3.1和支杆3.2均与应变天平7连接。修正导弹模型的用于安装腹撑支杆3.1或支杆3.2的开孔位置与导弹模型4上的开孔位置不同,其他均相同。
50.腹撑支杆3.1包括腹连杆51和腹撑杆52,腹连杆51用于连接腹撑杆52与应变天平7,腹连杆51连接于应变天平7朝向修正导弹模型头部的一端,腹撑杆52与导弹模型之间的预置角与对应的头撑模型的预置角相同;支杆3.2包括腹撑支杆3.1和假头撑53,假头撑53与腹连杆51固定连接,假头撑53从修正导弹模型的头部伸出。亚跨声速试验时,假头撑53突出腹撑带头撑导弹模型6.2头部距离不小于修正导弹模型头部收口直径的3倍。超声速试验时,假头撑53突出模型6.2的距离不小于头部收口直径的1.5倍。
51.将整条轨迹线分段模拟,本实施例中,在0~-30
°
攻角范围内采取尾直支杆21与应变天平7连接的方式,在-30~-90
°
攻角范围内采用尾预弯支杆22与应变天平7连接的方式,在-90~-120
°
攻角范围内采用头预弯支杆23与应变天平7连接的方式,在-120~-180
°
攻角范围内采用头直支杆24与应变天平7连接的方式。特别需要指出的是,接力点处模型的三个方向的位移和三个方向的姿态角保持完全相同。
52.并且本实施例中,尾直支杆21的支撑杆12与导弹模型4之间的预置角为0
°
,尾预弯支杆22的支撑杆12与导弹模型4之间的预置角为-60
°
,头预弯支杆23的支撑杆12与导弹模型4之间的预置角为-120
°
,头直支杆24的支撑杆12与导弹模型4之间的预置角为-180
°
。
53.对于采取尾撑的0~-90
°
攻角范围的气动数据,在试验过程中不修正直接使用;对
于采取尾撑的-90
°
~-180
°
攻角范围的气动数据,考虑到头撑引起的模型外形破坏以及头撑和模型间的气动干扰,在试验过程中要对每次测得的气动数据进行修正。设计如附图2所示的腹撑系统和腹撑带假头撑系统,开展头撑模型干扰的修正。具体修正方法如下:
54.i.某一条件下,试验测得导弹模型4连接头撑机构试验的气动量为c0,此时模型姿态角为(
ɑ
,β,γ);
55.ii.相同条件下,将腹撑模型6.1置于对应姿态角(
ɑ
,β,γ)下,腹撑机构与腹撑模型6.1组合测得的气动量为c1;(此处的模型不是4,而是6.1)
56.iii.相同条件下,将腹撑带假头撑模型6.2置于对应姿态角(
ɑ
,β,γ)下,腹撑带假头撑机构与模型6.2组合测得的气动量为c2;
57.iv.对头撑试验气动量进行修正,得到修正后的气动量cr=c
0-(c
2-c1),将修正后的气动量cr输入导弹六自由度动力学方程进行解算,获得其下一时刻在风洞中的位姿。
58.本说明书(包括任何附加权利要求、摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
59.本发明并不局限于前述的具体实施方式。本发明扩展到任何在本说明书中披露的新特征或任何新的组合,以及披露的任一新的方法或过程的步骤或任何新的组合。
60.本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
