1.本发明涉及带孔印制电路板搬运、高精密电子元器件无损无痕搬运与机械臂末端执行器研制等,特别是涉及一种基于微位移加载楔形刚毛束的平面黏附机构
背景技术:
2.如今印制电路板的使用涵盖医疗设备、消费类电子产品、工业设备、汽车、航空航天等行业,并且不断发展成为新的行业和应用。这种材料在未焊接任何元器件之前几乎是一个纯平面的板子,但是一块电路板上却有着许多大大小小的孔,每个孔洞都是有其目的而被设计出来的。
3.正是因为这些必不可少的通孔使得印制电路板在正式加工装配前的搬运工作变得困难了起来。机械式夹持器需要目标物有可以夹持的机械接口或有一定厚度,对于整体较薄的印制电路板不太适用,且容易在夹持位置出现应力集中产生变形的情况,对于精密加工的工况下会受到一定的局限性;吸附式末端执行器工作依靠局部真空环境的产生,对于表面具有许多通孔的印制电路板来说很难实现稳定的抓取或造成多层同时抓取的误操作;多指灵巧手这种机械臂末端执行器也很难在固定位置对印制电路板进行稳定拾取搬运。因此利用仿生楔形刚毛束对印制电路板进行稳定无痕黏附搬运是一种行之有效的操作方式。
4.平面黏附的机理在于对微米级楔形刚毛束与目标物接触并实施切向加载位移,刚毛束弯曲并产生法向黏附力即“范德华力”。因楔形刚毛束的“范德华力”不受黏附对象材料和失重、辐射、温度等环境因素影响,且可产生足够大的法向黏附力以实现对目标的“柔性黏附”,为平面刚性材料物体、印制电路板的无损搬运提供了一种更为可靠的操作手段。针对集成楔形刚毛束的平面黏附机构能够对物体进行稳定拾取/释放,需要满足以下几点的要求:(1)对楔形刚毛束要有一定的法向预加载;(2)能够实现对楔形刚毛束的切向加载/卸载;(3)在加载和卸载过程中实现楔形刚毛束的切向微位移。
5.近年来,研究学者们在仿生黏附机构方面进行了深入的研究。美国斯坦福大学研制出螺杆驱动的腱线式仿生附着机构,其利用棘轮螺母调节腱线张力以改变对刚毛束的加载力,实现对目标物黏附/脱附的控制。为进一步提升机构黏附效果,随后分别设计了串联滑轮组驱动和恒力弹簧驱动的腱线式仿生附着机构。伊利诺伊理工大学还采用了气爪与连杆机构配合的方式调节腱线张力来稳定对楔形刚毛束的加载力。但在研究中也发现,由于腱线加载方式为点接触加载且实际中不可避免存在装配误差,极易引入面外扭矩、剥离力矩等干扰,导致黏附装置的操作稳定性差;并且腱线在长时间、多频次的加载/卸载过后自身韧性会大大降低甚至出现断裂;最重要的是基于切向加载力从而产生方向黏附力的过程中是以一固定的切向加载力来拉弯楔形刚毛束,对于不同表面能材料和有无孔洞的物体表面来说所需的切向加载力会有所不同,只用固定大小的切向加载力会造成加载不充分或楔形刚毛束滑移现象均会使法向黏附力表现不佳导致黏附不稳定或失败。
6.总的来说,传统的驱动楔形刚毛束平面黏附机构多为腱线控制加载力形式,很少
使用直线导轨来保证楔形刚毛束本身的平面度,也没有使用机械加工的方式来要求加工精度,并且也没有考虑到腱线本身不能反复工作和固定切向加载力控制会造成的加载不充分或滑移现象。这些都使得机构无法发挥楔形刚毛束最佳的黏附力,限制了机构的性能。
技术实现要素:
7.本发明的目的是提供一种基于微位移加载楔形刚毛束的平面黏附机构,以解决上述现有技术存在的问题,将传统的腱线、切向力加载方式转换成直线导轨、切向微位移加载方式,实现对楔形刚毛束的平稳加载和卸载,从而满足平面物体、带孔印制电路板的可靠稳定无损无痕拾取操作的应用需求。
8.本发明采用的技术方案为一种基于微位移加载楔形刚毛束的平面黏附机构,包括驱动部分和切向微位移传递机构,所述的驱动部分包括电磁铁、气缸、直线电机、连杆机构中的一种或多种的组合,所述的电磁铁安装在外框架,电磁铁的前方设有可被电磁力吸引的铁板并与电磁铁保持微小间距,铁板固定在连接块靠中间的一侧;所述的切向微位移传递机构包括连接块和底板,所述底板与直线导轨上的滑块进行固定,连接块与底板固定连接,连接块的上方有连接螺钉和调整螺钉,两侧的连接螺钉间还有已被拉伸的弹簧钩连,底板下方粘结楔形刚毛垫。
9.优选地,所述机构对称设置,进行对向加载,增大机构的空间利用率,使机构体积小型化并减少自身重量。
10.优选地,所述机构中的导轨滑块倒置使用,以导轨平面作为机构基准面,减少滑块到楔形刚毛束之间的连接零部件,提高两块楔形刚毛束尖端的表面的平行度与平面度。
11.优选地,所述底板连接在滑块上使楔形刚毛束的切向移动被限制在固定平面内。
12.优选地,所述滑块带动楔形刚毛束切向移动距离可调,通过限制切向位移距离的方式提高机构对于不同类型平面的适应性。
13.优选地,所述机构依靠弹簧回缩的弹力带动楔形刚毛束进行加载,减少了电磁铁所需通电的时间,降低了搬运过程中机构的整体能耗并保证加载过程的稳定。
14.优选地,所述机构零部件采用机械加工的方式,降低了机构自身偏差对黏附效果带来的影响。
15.优选地,所述楔形刚毛垫与底板通过硅胶连接并在硅胶凝固过程中施加重物压平,进一步达到楔形刚毛束尖端对齐的目的。
16.与现有技术相比较,本发明所述平面黏附机构首次采用控制切向微位移方式进行加载,大大增加了机构在拾取平面物体时的稳定性和成功率。因为楔形刚毛在产生法向黏附力时需要被充分拉弯,拉弯时的切向移动微位移是固定的,采用切向力控制的方法容易造成切向移动过大黏附力下降或者黏附失败;在加载前通过调整限位螺钉伸出的长度来控制切向能够移动的距离进而既可以使刚毛被充分拉弯,又可以避免移动距离过大造成的负面作用。应对带孔、脆弱易碎平面物体的拾取和搬运有很好的效果。
附图说明
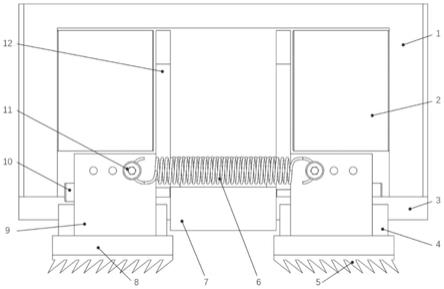
17.图1为本发明中基于微位移加载楔形刚毛束的平面黏附机构的结构示意图、未加载状态下的原理图;
18.图2a为本发明中基于微位移加载楔形刚毛束的平面黏附机构在准备加载状态下的原理图;
19.图2b为本发明中基于微位移加载楔形刚毛束的平面黏附机构在加载状态下的原理图;
20.图2c为本发明中基于微位移加载楔形刚毛束的平面黏附机构在卸载状态下的原理图;
21.图中:1-外框架、2-电磁铁、3-导轨、4-滑块、5-楔形刚毛束、6-弹簧、7-限位块、8-底板、9-连接块、10-调整螺钉、11-连接螺钉、12-铁板。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.本发明的目的是提供一种基于微位移加载楔形刚毛束的平面黏附机构,以解决现有技术存在的问题。
24.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
25.本发明提供一种基于微位移加载楔形刚毛束的平面黏附机构,如图1所示,包括外框架、电磁铁、导轨、滑块、楔形刚毛束、弹簧、限位块、底板、连接块、调整螺钉、连接螺钉、铁板;楔形刚毛束用于接触并黏附目标物;弹簧、连接块、底板、铁板用于实现对楔形刚毛束切向微位移的加载或卸载;楔形刚毛束切向微位移的距离由铁板与电磁铁间距控制,通过调整螺钉伸出到限位块的长度实现;楔形刚毛束的切向运动通过与底板连接的滑块被限制在导轨平面内;外框架与电磁铁、导轨通过螺钉固定连接,用于支撑整个机构并保持各部分运动过程中的稳定以及作为基准平面保证安装精度。两块楔形刚毛束通过硅胶连接在底板下方,电磁铁设置于连接块顶部,电磁铁通电产生的电磁力作为机构运动的动力源。底板与滑块间通过螺钉连接;底板与连接块间通过螺钉连接;导轨与外框架通过螺钉连接;限位块与导轨间通过螺钉连接;电磁铁与外框架通过螺钉连接;铁板与连接块间通过螺钉连接,减少了各部分机构之间的安装空隙,使机构更加紧凑并减弱了由于机构安装而带来的楔形刚毛束与目标物接触不充分的情况。
26.外框架、限位块、底板、连接块需要使用硬度较大且易于加工成表面光滑的材料,材质优选为6061-t651;铁板材料为白口铁;导轨滑块选择标准型号mgn7;电磁铁选择直流12v驱动,电磁吸力8kg的型号。
27.本发明中的平面黏附机构采用楔形刚毛束作为黏附材料,楔形刚毛束的黏附机理为范德华效应;楔形刚毛束5具有低预压、高黏附、易脱附特性,黏附时需要施加较小的法向预压力,刚毛与目标物表面接触,此时范德华力较小,在此基础上施加切向力或切向微位移使刚毛发生弯曲,刚毛与目标物的接触面积增大,相应的范德华力也随之增大。
28.为进一步保证机构运行的稳定性,黏附力、力矩的平衡,发明中的楔形刚毛束、电磁铁、滑块、底板、连接块均采用对称设置于限位块的两侧。
29.本发明提供的基于微位移加载楔形刚毛束的平面黏附机构工作时分为准备、加载和卸载三个过程。图2a为机构准备加载状态下的原理图,平面黏附机构电磁铁通电,电磁铁产生吸引力用于将铁板吸引靠近,弹簧随之被拉开并储存弹性势能,在加载前此步骤为准备工作,此时机构还未与目标物接触,电磁铁要保持通电状态,但可以在距离目标物较近时开始此过程,减少电磁铁持续通电的时间节约电能也能减少电磁铁发热。
30.图2b为机构在加载状态下的原理图,平面黏附机构加载时的运动过程如下:首先平面黏附机构楔形刚毛束与目标物在一定的法向压力下紧密接触,此时楔形刚毛束发生轻微弯曲,从而产生的法向黏附力很小且不稳定;然后开始加载动作,电磁铁取消通电以至于停止对铁板的吸引,弹簧释放弹性势能向内收缩并带动连接块产生切向微位移,连接块的切向微位移被限制到调整螺钉接触到定位块,楔形刚毛束的尖端与目标物接触不发生移动,上部由于底板被连接块带动而被明显拉弯,产生足够大的法向黏附力且可以对目标物实现稳定黏附。
31.图2c为机构在卸载状态下的原理图,平面黏附机构卸载时的运动过程如下:电磁铁再次通电,电磁铁产生的电磁吸引力用于将铁板吸引靠近,弹簧随之被拉开并储存弹性势能,楔形刚毛束的尖端与物体接触不发生移动,上部的楔形刚毛由于底板被连接块反向带动而恢复至拉弯之前的状态,此时足够大的法向黏附力消失,通过控制外框架将平面黏附机构与目标物脱离,机构与目标物脱离后即可结束对电磁铁的通电,完成卸载过程。
32.图2a、2b中的σx为可调整的楔形刚毛束切向微位移,通过微位移调整螺钉和限位块共同控制此距离。
33.本发明应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。