一种基于浅层神经网络的舵机pid自适应调节系统
技术领域
1.本发明专利涉及自动控制领域,具体涉及一种基于浅层神经网络的舵机pid自适应调节系统。在舵机负载发生变化时,该系统能自适应进行pid参数的调节,实现舵机角度精确控制。
背景技术:
2.海洋产业的蓬勃发展,使得与水下相关的技术领域不断发展进步,其中潜艇、水下潜航器等领域有了巨大的技术需求,其中高性能的舵机是潜航器完成指定任务的重要保障。舵机的作用如同转向系统于汽车一样,其功能是实现潜艇的转向任务。在众多的舵机控制算法中,pid控制应用最为常见,其算法本身能较好地实现舵机角度的精确控制,同时又具有较快的相应,除此之外,该算法经过长期的发展和应用验证,也拥有十分好的稳定性。但其应用在水下潜航器的舵机控制上也存在一些问题,其主要问题是负载的变化,单一的定值pid控制会出现控制精度不够,响应收敛缓慢的问题。故需要提出一项能有效应对水下负载变化,实现pid自适应调节的算法。现存的模糊pid算法在一定程度上能解决自适应调节的问题,但是其模糊规则的制订往往依赖于指定者的经验,其实际操作过程中并不具有很好地推广性。故设计一种能应对负载变化,实现pid自适应调节的控制系统,具有十分重要的意义。
技术实现要素:
3.本发明的目的是针对实际舵机水下的工作环境,提出了一项基于浅层神经网络的自适应pid控制系统。通过预训练,获得负载变化与pid调节参数之间的关系。在不同负载情况下,pid能实现自适应调节,最终实现舵机的快速响应、精确角度控制。
4.为实现上述技术目的,本发明采用的技术方案如下:
5.一种基于浅层神经网络的舵机pid自适应调节系统,包括浅层神经网络系统;所述浅层神经网络系统以负载参数作为输入层参数,以pid算法中的三个调节参数kp、ki、kd作为输出层参数;
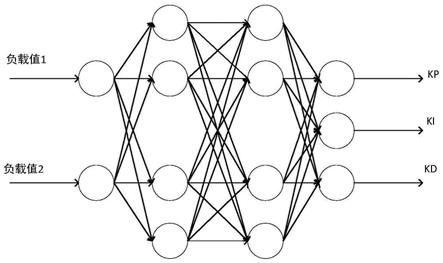
6.进一步,所述浅层神经网络系统由输入层、输出层和两个隐藏层构成,其输入层由两个神经元构成,其输入值均为实际负载参数值;浅层神经网络系统的输出层为三个神经元构成,两个隐藏层分别由20个神经元组成,其连接方式为全联接,使用的激活函数为sigmoid函数;
7.进一步,所述浅层神经网络系统的迭代优化过程使用反向传播法进行网络权重的调节。
8.本发明的有益效果为:本发明完美地解决了因负载变化而导致pid控制算法精度差、相应慢的问题,实现了pid算法的自适应调节。相较与模糊pid控制器,本控制系统操作方式简单,应用价值极大。
附图说明
9.图1为本发明的浅层神经网络构成示意图;
10.图2为采用本控制系统的控制流程图。
具体实施方式
11.为了使本领域的技术人员可以更好地理解本发明,下面结合实施例对本发明技术方案进一步说明。
12.如图1所示,本实施例的基于浅层神经网络的舵机pid自适应调节系统,利用神经网络具有预测控制的特性,设计了一种浅层神经网络系统,该浅层神经网络系统由输入层、输出层和两个隐藏层构成,其输入层由两个神经元构成,其输入值均为实际负载参数值;浅层神经网络系统的输出层为三个神经元构成,以pid算法中的三个调节参数kp、ki、kd作为输出层参数,两个隐藏层分别由20个神经元组成,其连接方式为全联接,使用的激活函数为sigmoid函数,所述浅层神经网络系统的迭代优化过程使用反向传播法进行网络权重的调节。
13.在实际的舵机控制过程中,本实施例的浅层神经网络控制系统仅仅只是对pid进行自适应调节,其主控制过程中,依旧通过了磁编码器对舵机实际角度进行了数据采集,从而实现整个流程的控制,其具体控制流程如图2所示。
14.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
技术特征:
1.一种基于浅层神经网络的舵机pid自适应调节系统,其特征在于:包括浅层神经网络系统;所述浅层神经网络系统以负载参数作为输入层参数,以pid算法中的三个调节参数kp、ki、kd作为输出层参数。2.根据权利要求1所述的基于浅层神经网络的舵机pid自适应调节系统,其特征在于:所述浅层神经网络系统由输入层、输出层和两个隐藏层构成。3.根据权利要求2所述的基于浅层神经网络的舵机pid自适应调节系统,其特征在于:所述输入层由两个神经元构成,其输入值均为实际负载参数值。4.根据权利要求3所述的基于浅层神经网络的舵机pid自适应调节系统,其特征在于:所述浅层神经网络系统的输出层为三个神经元构成,两个隐藏层分别由20个神经元组成,其连接方式为全联接,使用的激活函数为sigmoid函数。5.根据权利要求4所述的基于浅层神经网络的舵机pid自适应调节系统,其特征在于:所述浅层神经网络系统的迭代优化过程使用反向传播法进行网络权重的调节。
技术总结
本发明公开了一种基于浅层神经网络的舵机PID自适应调节系统,包括浅层神经网络系统;所述浅层神经网络系统以负载参数作为输入层参数,以PID算法中的三个调节参数KP、KI、KD作为输出层参数;所述浅层神经网络系统由输入层、输出层和两个隐藏层构成,其输入层由两个神经元构成,其输入值均为实际负载参数值;浅层神经网络系统的输出层为三个神经元构成,两个隐藏层分别由20个神经元组成,其连接方式为全联接,使用的激活函数为sigmoid函数。本控制系统在不同负载情况下,PID能实现自适应调节,最终实现舵机的快速响应、精确角度控制。精确角度控制。精确角度控制。
技术研发人员:柏龙 杜相龙 陈晓红 孙园喜
受保护的技术使用者:重庆大学
技术研发日:2022.01.26
技术公布日:2022/5/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。