1.本技术涉及水泥聚苯板加工技术的领域,尤其是涉及一种适用于不同规格的分垛装置。
背景技术:
2.水泥聚苯板是以旧聚苯乙烯泡沫破碎后的颗粒为骨料,用普通水泥做胶结料,外加稳泡剂、发泡剂搅拌后浇注成型的保温板。水泥聚苯板具有隔热效果好、导热系数低、屋面施工方便、成本低、自重轻等优点,广泛应用于建筑领域。
3.在水泥聚苯板的生产过程中,按照水泥聚苯板的不同使用场景与使用需求,需要将生产的水泥聚苯板切割为不同的尺寸大小。在实际生产中,通过分垛装置将成垛的水泥聚苯板原料输送至切割机构进行切割,需要安装多个分垛装置,将水泥聚苯板根据不同的切割尺寸输送至相对应的切割机构。
4.针对上述中的相关技术,发明人认为设置多个分垛装置使得水泥聚苯板的加工成本较高。
技术实现要素:
5.为了减少水泥聚苯板的加工成本,本技术提供一种适用于不同规格的分垛装置。
6.本技术提供的一种适用于不同规格的分垛装置采用如下的技术方案:
7.一种适用于不同规格的分垛装置,包括机架以及设置在机架上的第一输送辊、第二输送辊、转向组件、第三输送辊以及取料组件,所述第二输送辊设置在转向组件上,所述转向组件用于驱动第二输送辊进行转动,所述第三输送辊在第二输送辊的两侧均有设置,所述第一输送辊将水泥聚苯板输送至第二输送辊,所述第二输送辊将水泥聚苯板依次输送至两侧的第三输送辊上,所述取料组件在两个第三输送辊的一侧均有设置,所述取料组件用于将第三输送辊上的水泥聚苯板移动至第三输送辊以外。
8.通过采取上述技术方案,生产的成垛水泥聚苯板通过第一输送辊输送至第二输送辊上,第二输送辊将水泥聚苯板输送至第三输送辊,通过转向组件转动第二输送辊,依次对第二输送辊两侧的第三输送辊上输送水泥聚苯板,第三输送辊再将水泥聚苯板输送至切割机处,利用取料组件将第三输送辊上的水泥聚苯板移动出第三输送辊的范围并移动至切割机上,根据水泥聚苯板的不同切割需求,可在两个第三输送辊的一侧安装不同的切割机,依次通过第一输送辊输送不同尺寸的水泥聚苯板,从而通过一个分垛装置对两台不同的切割机进行输料,节约了成本,提高了生产效率。
9.可选的,所述转向组件包括驱动电机、主动齿轮与从动齿轮,所述机架上竖直转动设置有转轴,所述转轴顶部设置有安装板,所述第二输送辊设置在安装板上,所述驱动电机设置在机架上,所述主动齿轮同轴线设置在驱动电机的输出轴上,所述从动齿轮设置在转轴上,所述主动齿轮与从动齿轮相啮合。
10.通过采取上述技术方案,启动驱动电机,驱动电机的输出轴带动主动齿轮进行转
动,主动齿轮的转动带动从动齿轮进行转动,从而带动转动轴相对于机架进行转动,进而达到便于驱动第二输送辊进行转动的效果。
11.可选的,所述取料组件包括气缸以及推杆,所述气缸设置在机架上且所述气缸的活塞杆朝向第三输送辊延伸,所述推杆设置在气缸的活塞杆末端。
12.通过采取上述技术方案,启动气缸,气缸的活塞杆伸出,气缸的活塞杆带动推杆朝向第三输送延伸,从而将将第三输送辊上的水泥聚苯板推出至第三输送辊外的切割机上,达到便于将第三输送辊上的水泥聚苯板取下的效果。
13.可选的,所述机架上且位于气缸的两侧均设置有导向杆,所述导向杆为中空杆体,所述导向杆内滑动设置有伸缩杆,所述伸缩杆的一端与推杆相连。
14.通过采取上述技术方案,当气缸推动推杆移动时,由于推杆长度较长,利用气缸两侧的导向杆对推杆进行导向,减小了推杆移动过程中发生偏移的可能性。
15.可选的,所述机架上还设置升降组件,所述升降组件用于驱动第三输送辊在竖直方向进行移动。
16.通过采取上述技术方案,利用升降组件驱动第三输送辊在竖直方向进行间隙移动,从而使得推杆将第三输送辊上的成垛的水泥聚苯板一张一张的推出,便于切割。
17.可选的,所述升降组件包括电缸、链条以及升降梁,所述第三输送辊的边缘连接设置有多条所述链条,所述机架顶部且位于多条链条的竖直上方均设置有第一链轮,所述升降梁滑动设置在机架上且位于第三输送辊的一侧,所述机架上且位于升降梁的竖直上方设置有多个第二链轮,多个所述第二链轮与多个第一链轮相正对,多根所述链条绕设过相对应的第一链轮与第二链轮后与升降梁相连接,所述电缸设置在升降梁上且电缸的活塞杆与机架顶部相连接。
18.通过采取上述技术方案,启动电缸,电缸的活塞杆伸出,从而推动升降梁远离机架的顶部,进而带动多根链条同步进行移动,从而达到平稳驱动第三输送辊在竖直方向上进行移动的效果。
19.可选的,所述升降梁的两端设置套筒,所述机架上竖直设置有限位杆,所述套筒滑动套设在定位杆上。
20.通过采取上述技术方案,升降梁在进行移动时,套筒沿限位杆的长度方向进行移动,从而使得升降梁保持在竖直方向上进行移动,一定程度上避免了升降梁在移动时发生偏移的可能性。
21.可选的,所述机架上且位于第二输送辊的上方设置分料组件,所述分料组件包括无杆气缸以及刮板,所述刮板设置在无杆气缸的滑台上。
22.通过采取上述技术方案,第一输送辊将成垛的水泥聚苯板输送至第二输送辊上,启动无杆气缸,无杆气缸驱动刮板进行移动,从而将第二输送辊上高于刮板的水泥聚苯板输送至一侧的第三输送辊上,再通过第二输送辊将剩下的水泥聚苯板输送至另一侧的第三输送辊上,从而一定程度上避免了单侧的第三输送辊上出现水泥聚苯板空缺,提高了生产效率。
23.可选的,所述机架上且位于第三输送辊的一端设置有光电传感器以及控制器,所述光电传感器与控制器电连接,所述控制器与电缸电连接。
24.通过采取上述技术方案,光电传感器用于采集推杆所在水平面的水泥聚苯板的光
学信号并传输至控制器,当推杆将推杆所在水平面的水泥聚苯板推出第三输送辊的范围后,控制器启动电缸,电缸的活塞杆伸出,从而驱动第三输送辊向上移动,将下方的水泥聚苯板起升至推杆所在水平面;从而达到便于从第三输送辊上依次取下多张水泥聚苯板的效果。
25.可选的,所述机架上且位于第三输送辊的一端设置有接近开关,所述接近开关与电缸电连接。
26.通过采取上述技术方案,当第三输送辊靠近机架底部时,接近开关控制电缸的活塞杆伸出,从而驱动第三输送辊上升,当第三输送辊上升至目的位置时,接近开关控制电缸的活塞杆收回,从而驱动第三输送辊下降;达到便于限制第三输送辊的行程的作用。
27.综上所述,本技术包括以下至少一种有益技术效果:
28.1.需切割的成垛水泥聚苯板通过第一输送辊输送至第二输送辊上,第二输送辊将水泥聚苯板输送至第三输送辊,通过转向组件转动第二输送辊,依次对第二输送辊两侧的第三输送辊上输送水泥聚苯板,第三输送辊再将水泥聚苯板输送至切割机处,利用取料组件将第三输送辊上的水泥聚苯板移动出第三输送辊的范围并移动至切割机上,根据水泥聚苯板的不同切割需求,可在两个第三输送辊的一侧安装不同的切割机,依次通过第一输送辊输送不同尺寸的水泥聚苯板,从而通过一个分垛装置对两台不同的切割机进行输料,节约了成本,提高了生产效率;
29.2.第三输送辊边缘连接设置有多条链条,链条的竖直上方均设置有第一链轮,链条绕设过相对应的第一链轮与第二链轮后与升降梁相连接,缸设置在升降梁上且电缸的活塞杆与机架顶部相连接,启动电缸,电缸的活塞杆伸出,从而推动升降梁远离机架的顶部,进而带动多根链条同步进行移动,从而达到平稳驱动第三输送辊在竖直方向上进行移动的效果;
30.3.机架上且位于第二输送辊的上方设置有无杆气缸,无杆气缸的滑台上设置有刮板,通过刮板对第二输送辊上高于刮板的水泥聚苯板输送至一侧的第三输送辊上,再通过第二输送辊将剩下的水泥聚苯板输送至另一侧的第三输送辊上,从而一定程度上避免了单侧的第三输送辊上出现水泥聚苯板空缺,提高了生产效率。
附图说明
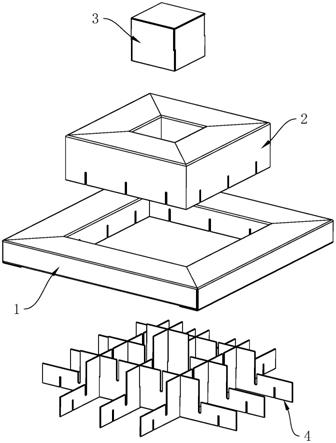
31.图1是本技术实施例的结构示意图。
32.图2是用于展示本技术实施例中第一输送辊与第二输送辊的局部结构示意图。
33.图3是用于展示本技术实施例中第三输送辊的局部结构示意图。
34.图4是图3中a部放大图。
35.附图标记说明:
36.1、机架;11、转轴;12、安装板;13、第一链轮;14、第二链轮;15、限位杆;16、光电传感器;17、控制器;18、接近开关;2、第一输送辊;3、第二输送辊;4、转向组件;41、驱动电机;42、主动齿轮;43、从动齿轮;5、第三输送辊;6、取料组件;61、气缸;62、推杆;63、导向杆;64、伸缩杆;7、升降组件;71、电缸;72、链条;73、升降梁;731、套筒;8、分料组件;81、无杆气缸;82、刮板。
具体实施方式
37.以下结合附图1-4对本技术作进一步详细说明。
38.本技术实施例公开一种适用于不同规格的分垛装置,参照图1和图2,一种适用于不同规格的分垛装置包括机架1以及安装在机架1上的第一输送辊2、第二输送辊3、转向组件4、第三输送辊5以及取料组件6,机架1为方钢焊接而成的框架,机架1由三个矩形框架拼接而成,第一输送辊2与第二输送辊3安装在机架1中部,并且第二输送辊3安装在转向组件4上,第三输送辊5有两个且安装在第二输送辊3的两侧,第三输送辊5的输送方向与第一输送辊2的输送方向相垂直,且两个第三输送辊5的输送方向均从靠近第二输送辊3的一侧朝向背离第二输送辊3的一侧,取料组件6在两个第三输送辊5的一侧均有安装。
39.成垛的水泥聚苯板原料通过第一输送辊2输送至第二输送辊3上,转向组件4驱动第二输送辊3转动,第二输送辊3转动至输送方向与一侧的第三输送辊5相同时,通过第二输送辊3将水泥聚苯板输送至一侧的第三输送辊5上,通过取料组件6将第三输送辊5上的水泥聚苯板送入切割机中;转向组件4再驱动第二输送辊3转动至与第一输送辊2输送方向一致,第一输送辊2将后续的水泥聚苯板输送至第二输送辊3上,转向组件4驱动第二输送辊3转动至与另一侧的第三输送辊5输送方向一致,从而依次将水泥聚苯板输送至两个第三输送辊5,通过两个第三输送辊5将水泥聚苯板输送至不同的切割机;利用一台分垛装置对两个切割机进行供料,减少了加工成本。
40.参照图1和图2,转向组件4包括驱动电机41、主动齿轮42以及从动齿轮43,在机架1上且位于第二输送辊3的下方安装有转轴11,转轴11竖直转动安装在机架1上,在转轴11顶部水平固定安装有安装板12,第二输送辊3安装在安装板12上,驱动电机41通过螺栓可拆卸安装有转轴11的一侧,且驱动电机41的输出轴竖直向上延伸,主动齿轮42同轴线固定连接在驱动电机41的输出轴上,从动齿轮43同轴线固定连接在转轴11上,主动齿轮42与从动齿轮43相啮合。
41.启动驱动电机41,驱动电机41的输出轴带动主动齿轮42进行转动,主动齿轮42的转动带动与之啮合的从动齿轮43进行转动,进而驱动转轴11带动安装板12进行转动,达到驱动第二输送辊3进行转动的效果。
42.参照图2,在机架1上且位于第二输送辊3的上方安装有分料组件8,分料组件8包括无杆气缸81以及刮板82,无杆气缸81在机架1上位于第二输送辊3的上方安装有两个,两个无杆气缸81相平行且均垂直于第一输送辊2的输送方向,刮板82为矩形板,刮板82与两个无杆气缸81的滑台均固定连接,刮板82朝向第二输送辊3,刮板82的板面与无杆气缸81的长度方向相垂直,刮板82的下板面与第二输送辊3之间有一段间隔。
43.第一输送辊2将成垛的水泥聚苯板输送至第二输送辊3上,第二输送辊3转动至与第三输送辊5输送方向一致,启动无杆气缸81,无杆气缸81的滑台沿无杆气缸81的缸筒进行移动,带动刮板82沿无杆气缸81的长度方向进行移动,从而将第二输送辊3上的高于刮板82的水泥聚苯板刮动至一侧的第三输送辊5上,再启动第二输送辊3将剩下的水泥聚苯板输送至另一侧的第三输送辊5上。
44.参照图1和图3,取料组件6包括气缸61以及推杆62,取料组件6在机架1上且位于两个第三输送辊5的一侧均有安装,气缸61固定安装在机架1上,且气缸61的活塞杆朝向第三输送辊5延伸,推杆62为矩形长杆体,推杆62的长度方向平行于第三输送辊5的输送方向,气
缸61的活塞杆末端与推杆62的中央位置固定连接。在机架1上且位于气缸61的两侧均安装有导向杆63,导向杆63的长度方向平行于气缸61的长度方向,导向杆63为矩形杆体,在导向杆63内沿导向杆63的长度方向开设有容纳孔,在导向杆63内滑动安装有伸缩杆64,伸缩杆64的一端延伸至导向杆63外并与推杆62固定连接。
45.成垛的水泥聚苯板输送至第三输送辊5上时,启动气缸61,气缸61的活塞杆伸出,带动推杆62朝向第三输送辊5移动,从而将水泥聚苯板推出第三输送辊5的范围,在第三输送辊5的一侧可安装上切割机,通过取料组件6将水泥聚苯板推动至切割机内。
46.参照图1和图3,在机架1上安装有升降组件7,升降组件7包括电缸71、链条72以及升降梁73,链条72在第三输送辊5的四角处均有安装,且靠近取料组件6的两条链条72与远离取料组件6的两条链条72错位设置,在机架1上且位于四根链条72的正上方均转动安装有第一链轮13,四根链条72均绕设在相对应的第一链轮13上;升降梁73安装在机架1上且位于取料组件6的一侧,升降梁73沿竖直方向滑动安装在机架1上,在升降梁73的正上方水平转动安装有链轮轴,链轮轴上与四个第一链轮13相正对固定安装有四个第二链轮14,四条链条72绕设过相对应的第一链轮13与第二链轮14后与升降梁73固定连接。电缸71通过螺栓安装在升降梁73上,电缸71的缸体与升降梁73的上顶面相连接,电缸71的活塞杆竖直向上延伸且电缸71的活塞杆末端与机架1相连接。
47.参照图3,升降梁73的两端固定连接有套筒731,在机架1上与套筒731相对的位置沿竖直方向固定安装有限位杆15,套筒731滑动安装在限位杆15内。
48.启动电缸71,电缸71的活塞杆伸出或收回,推动升降梁73沿竖直方向靠近或远离地面,升降梁73的移动带动四根链条72同时进行移动,第一链轮13与第二链轮14转动,使得第三输送辊5的四角处同时受力,从而驱动第三输送辊5沿竖直方向平稳进行移动。
49.参照图3和图4,在机架1上且位于第三输送辊5的一侧安装有光电传感器16以及控制器17,光电传感器16与控制器17电连接,控制器17与电缸71电连接。光电传感器16用于采集推杆62所在水平面的水泥聚苯板的光学信号,并将光学信号传输至控制器17,控制器17控制电缸71的起闭。推杆62将第三输送辊5上位于推杆62所在水平面的水泥聚苯板推出,控制器17启动电缸71,电缸71驱动链条72进行移动,进而驱动第三输送辊5竖直向上移动,当第三输送辊5上的最上层水泥聚苯板移动至推杆62所在水平面时,光电传感器16采集到水泥聚苯板的光学信号,控制器17关闭电缸71,气缸61启动并通过推杆62将最上层的水泥聚苯板推出,从而一层一层将成垛的多层水泥聚苯板推出进行切割。
50.参照图3和图4,在机架1上且位于光电传感器16的一侧安装有接近开关18,接近开关18与电缸71电连接。根据实际使用情况调试接近开关18的感应距离与感应范围,当第三输送辊5移动至靠近机架1底部时,接近开关18控制电缸71的活塞杆伸出,驱动第三输送辊5向上移动;当第三输送辊5移动至上平面与刮板82的下地面平齐时,接近开关18控制电缸71关闭。
51.本技术实施例一种适用于不同规格的分垛装置的实施原理为:成垛的多层水泥聚苯板通过第一输送辊2输送至第二输送辊3上,驱动电机41启动,驱动电机41驱动第二输送辊3转动90
°
,此时第二输送辊3的输送方向与一侧的第三输送辊5的输送方向一致;启动无杆气缸81,无杆气缸81驱动刮板82进行移动,将第二输送辊3上高于刮板82的水泥聚苯板朝向一侧的第三输送辊5推动;第二输送辊3上剩余的水泥聚苯板通过第二输送辊3输送至另
一侧的第三输送辊5上;启动气缸61,气缸61驱动推杆62依次推动第三输送辊5上的每层水泥聚苯板至切割机上进行切割。
52.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。