1.本实用新型涉及机器人技术领域,具体地说是一种社区配送机器人。
背景技术:
2.近些年来,随着快递行业的突飞猛进,配送流程和规则逐渐被细化,社区配送最后五百米的问题逐渐暴露。受疫情的影响,各个社区、产业园区等逐渐实行封闭化管理,更加剧了这一问题,同时由于快递从业人员的流动性比较大,快递员更加难以进入社区,快递送货上门的愿望越来越远。目前许多公司开始尝试无人机配送,但由于技术上的门槛以及安全性、低空飞行领域的政策空白,导致该方案始终没有形成规模。
3.如何提供一种社区配送机器人,是需要解决的技术问题。
技术实现要素:
4.本实用新型的技术任务是针对以上不足,提供如何提供一种社区配送机器人,是需要解决的技术问题,来解决如何提供一种社区配送机器人的技术问题。
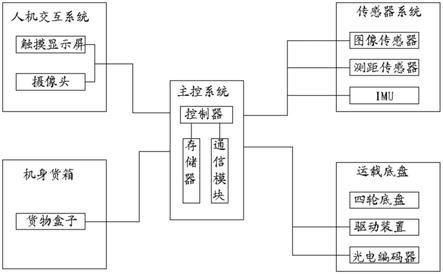
5.本实用新型一种社区配送机器人,包括:
6.主控系统,所述主控系统包括控制器、存储器以及通信模块,所述存储器和通信模块均与控制器电连接,所述通信模块用于实现机器人的对外通信;
7.运载底盘,所述运载底盘包括四轮底盘、驱动装置和光电编码器,所述光电编码器与四轮底盘中驱动轮一一对应,每个光电编码器均设置在对应的驱动轮处并与控制器电连接,用于获取驱动轮的行走里程信息,所述驱动装置设置在四轮底盘上并与控制器电连接,用于驱动四轮底盘行走;
8.机身货箱,所述机箱货箱设置于运载底盘的上方,用于装载货物;
9.传感器系统,所述传感器系统用于采集所述机器人周边的信息;
10.人机交互系统,所述人机交互系统包括摄像头和触控显示屏,所述摄像头与控制器连接,用于采集人员面部信息和货物信息,包括采集人脸信息以及扫描二维码和条形码,所述触控显示屏用于展示信息并通过触屏的方式支持输入信息。
11.作为优选,所述通信模块包括rs232通信模块、蓝牙模块、4g通信模块以及5g通信模块。
12.作为优选,所述机箱货箱包括多个货物盒子,每个货物盒子均为能够自动开闭的智能货物盒子,且每个货物盒子均与控制器独立连接。
13.作为优选,所述传感器系统包括:
14.图像传感器,所述图像传感器设置于机身货箱上,用于采集机器人机身周边信息;
15.测距传感器,所述测距传感器设置于运载底盘上,用于测距;
16.imu,所述imu设置于运载底盘上,用于测量测量三个维度的角速度、加度。
17.作为优选,所述测距传感器为红外测距传感器,所述测距传感器共多个并设置于运载底盘的四周。
18.作为优选,所述图像传感器为微软xbox one s体感kinect 2.0摄像头,用于同时采集深度信息和色彩信息。
19.本实用新型的一种社区配送机器人具有以下优点:
20.1、运载底盘上设置有光电编码器,通过光电编码器的单位数据内输出脉冲数,控制器可以计算出各个驱动轮的平均转速,同时控制器可通过底盘的驱动装置实现对底盘运动方向和速度的控制,从而实现了机器人智能行走,通过传感器系统可采集机器人周边的信息,基于这些信息可为机器人行走导航提供依据;
21.2、通过摄像头可以扫描货物和人员信息,通过触摸显示屏可以显示信息并支持输入信息,通过摄像头和触摸显示屏的配合,实现了人机交互,可以轻松实现人脸信息或验证码信息地比对,用户取货更加方便,并可以实现信息校验;
22.3、机身货箱由多个独立的货物盒子,通过控制器进行控制,便于独立的存储货物。
附图说明
23.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
24.下面结合附图对本实用新型进一步说明。
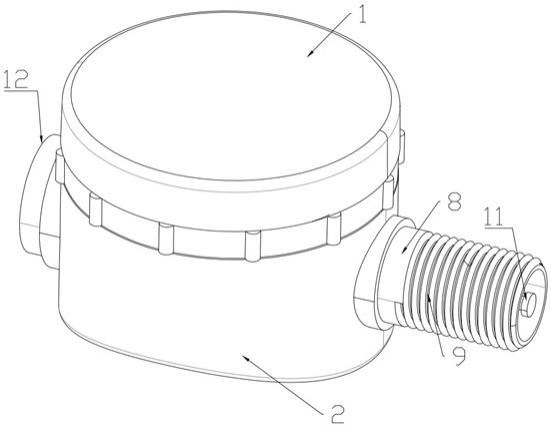
25.图1为实施例一种社区配送机器人的外部结果示意图;
26.图2为实施例一种社区配送机器人的控制原理框图;
27.图中,1、运载底盘,2、机身货箱,3、人机交互系统。
具体实施方式
28.下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好地理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定,在不冲突的情况下,本实用新型实施例以及实施例中的技术特征可以相互结合。
29.本实用新型实施例提供一种社区配送机器人,用于解决如何提供一种社区配送机器人的技术问题。
30.实施例:
31.本实用新型一种社区配送机器人,包括主控系统、运载底盘1、机身货箱2、传感器系统以及人机交互系统3,主控系统包括控制器、存储器以及通信模块,存储器和通信模块均与控制器电连接,通信模块用于实现机器人的对外通信;运载底盘1包括四轮底盘、驱动装置和光电编码器,光电编码器与四轮底盘中驱动轮一一对应,每个光电编码器均设置在对应的驱动轮处并与控制器电连接,用于获取驱动轮的行走里程信息,驱动装置设置在四轮底盘上并与控制器电连接,用于驱动四轮底盘行走;机箱货箱设置于运载底盘1的上方,用于装载货物;传感器系统用于采集所述机器人周边的信息;人机交互系统3包括摄像头和触控显示屏,摄像头与控制器连接,用于采集人员面部信息和货物信息,包括采集人脸信息以及扫描二维码和条形码,触控显示屏用于展示信息并通过触屏的方式支持输入信息。
32.本实施例控制系统的配置为cpu 2.5ghz,运行内存1g,存储容量为500g,安装有
rs232、蓝牙、4g、5g等通讯模块。实际应用中,主控单元中安装有ubuntu20.04操作系统,并在此之上安装有iros,集成三维地图构建、导航、路径规划、避障及人脸识别等智能算法包。
33.机身货箱2由若干个大小不同的货物盒子组成,可以满足不同货物大小的需要,每个盒子独立开闭,与中央控制系统相连。货物盒子的具体结果不做特别限定,可选用现有的能够电控控制器开闭的货物盒子。
34.传感器系统包括图像传感器、红外测距仪以及imu,底盘四周的红外测距仪采用深达威sw-lds50a激光测距仪,测量距离在0.05m~50m之间,位于机身货箱2的图像传感器为微软(microsoft)xbox one s体感kinect 2.0摄像头,能够同时采集深度信息和色彩信息,机器人上方的四个角上安装有图像传感器,可以采集机身周围三百六十度的信息,加上底盘上的红外测距仪,共同为机器人建图和导航提供数据依据。imu(inertial measurement unit,惯性测量单元)位于运载底盘1上方,同时控制系统相连,控制系统可以实时获取其捕获的数据。本实施例中imu为维特智能jy901姿态角度传感器,能够测量三个维度的角速度、加度。
35.人机交互系统3嵌入机身货箱2的左侧,由触控屏幕及其驱动再加上摄像头组成,同样与控制系统中控制器相连接。
36.人机交互系统3是与用户进行交互的口,摄像头可以扫描二维码、条形码对货物信息进行采集,也可以采集用户面部信息;触控屏幕实现货物信息的手动输入,配合摄像头采集的信息,共同完成信息校验。
37.在实际工作中,在该机器人的控制系统中配置iros,iros是一个智能机器人操作系统,安装简单,兼容各种常见系统。搭载有iros的机器人可以集成多种路径规划和导航算法,同时由于其数据传输的实时性和安全性,保证了机器人能在各种不同工况下安全高效地运行。该机器人能够在无人干预的情况下,利用自身所集成的算法构建起社区内的三维地图,在输入正确的地址之后,将多个货物按照规划的路径准确配送至指定位置,并通过人脸识别或验证码校验的方式实现身份确认,完成取货。
38.上文通过附图和优选实施例对本实用新型进行了详细展示和说明,然而本实用新型不限于这些已揭示的实施例,基与上述多个实施例本领域技术人员可以知晓,可以组合上述不同实施例中的手段得到本实用新型更多的实施例,这些实施例也在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。