1.本发明总体上涉及用于使一个或多个片材堆解套叠的解套叠设备。
背景技术:
2.近年来,为了例如实现批量销售、容易运输、处理等各种目的,以二次包装的形式对大量物品(例如包括液态食品的食品、家庭必需品、固定物品、饮料容器等)进行分组的趋势已经成倍增长。
3.近来,用于容纳液态食品和饮料的基于纸板的包装的使用显著增加,这导致各种形状和大小的纸板包装或纸箱的制造增加。
4.基于纸板的包装通常由可折叠的坯料或片材形成,该坯料和片材通常以一个或多个堆的形式接收,因此,在包装制造过程期间,需要从这些坯料或片材的堆中顺序地且单独地将这些坯料或片材拆堆或拆垛,然后将这些坯料或片材供给到包装过程,以便形成各种包装。
5.常规地,将这些坯料或片材拆堆的步骤通过利用各种拾取器(例如操纵器)来执行,该拾取器也可以采用适于间歇地从堆拾取顶部片材的机器人和/或机器人臂的形式。不幸的是,这种拾取器通常不是成本有效的并且具有高的周转时间,因此在需要以高速连续地进给这些片材的情况下不能很好地协调。
6.因此,已经付出了许多努力来生产将片材从堆中单独地、顺序地和高速地拆堆的工具。示例包括各种机械组件,所述机械组件包括所谓的指部和/或夹持器,其适于从堆中提离和/或拉离最上面或最下面的片材。然而,这些基于指部和夹持器的拉动机构通常适于拉动固定大小的片材或至少具有便于由这种指部或夹持器处理的类似形状和/或大小的片材。另外,由于这些拉动装置的滑动接触经常损坏片材,所以这种装置可能导致高废品率。
7.尽管通常期望提供尽可能快地将片材拆堆的系统,但是同样重要的是同一拆堆设备可用于各种形状和大小的片材。为了克服机械组件的问题,引入了各种基于空气喷嘴的拆堆机构。
8.例如,wo2008015347公开了使用可缩回吹风机构件,该可缩回吹风机构件大体垂直于片材堆布置,以便将空气射流吹到扁平物品上,从而从片材堆移除顶部片材。
9.类似地,us20110229297公开了一种具有产品承载板的解套叠设备,该产品承载板包括一对空气喷嘴组件,其可操作为将托盘从托盘的堆中分离并且迫使托盘抵靠产品承载板,使得产品承载板的移动可选择性地排出所分离的托盘。
10.然而,这些基于空气喷嘴的侧吹机构在将具有不同厚度的片材拆堆时通常不是有效的。进一步地,在大多数情况下,这些拆堆机构不可控地移出多于一个的片材,这特别是在自动化系统中不可接受的。
11.因此,尝试了各种其它解决方案来将顶部片材从片材的堆中解套叠。近来,趋势已经转向使用各种抽吸机构来执行解套叠操作。这些机构通常单独地或与空气喷嘴结合地利用抽吸机构。
12.例如,ep1541508公开了用于将放置在堆上的扁平物体拆堆的装置。该装置具有位于堆支撑物上方的抽吸装置和具有推动部件的推离装置。抽吸装置和推离装置以固定的距离位于堆支撑物的上方,并且推动部件在其面向堆支撑物的端面上、在将物体从抽吸装置的抽吸头推离时具有用于由抽吸头从堆中提起的下一个物体的止挡件。us 3,401,831公开了解套叠器,除了抽吸夹持器之外,该解套叠器还包括喷嘴,其在最外面的托盘与紧接着该最外面的托盘的托盘之间吹送加压空气,以便于它们的分离。这种抽吸机构利用抽吸头/喷嘴,这进一步需要真空提升机/供应部来产生用于抽吸的负气压。因此,这些布置通常在设计上过于复杂,并且在它们的操作中也不期望地缓慢。
13.近来,各种各样的拆堆装置或基于吸盘的机构由于其简单的结构和设计而得到使用。例如,如us5,254,071所公开的,这些机构通常包括具有真空吸盘的驱动机构,该真空吸盘交替地靠近、接触然后从片材堆移开。真空吸盘靠在堆的顶部片材上,然后将顶部片材带离以使其远离堆,然后将其放在另一个工作区域(例如包装线输送机)上。
14.在一些其它变型中,如us20140056684所描述的,使用拆堆装置来从底部拾取片材/托盘,该专利公开了托盘解套叠设备,该托盘解套叠设备将在储存区域内倒置的托盘的堆呈现给拾取器机构,并从托盘的堆中分离单个托盘。拆堆装置用于从托盘堆中移除单独的托盘。在拾取单个托盘之后,从动旋转装置使托盘反转并将托盘放置在位于解套叠设备下方的托盘输送机上。
15.然而,所有这些包装设备也具有某些缺点。首先,这些基于拆堆装置的机构利用适于根据预定的距离设定来从预定堆拾取和解套叠片材的驱动机构。然而,这种系统不是针对相同的包装是不同种类的片材的组合(例如包装坯料与分隔坯料组合)的情况而设计的。
16.因此,如从前面的讨论中可以理解的,现有的解决方案都没有完全提供根据多个堆的不同要求同时改变拆堆操作、同时防止暂停操作的灵活性。因此,在上述背景下,期望提供解套叠装置,该解套叠装置克服与现有技术相关联的这些问题,是负担得起的,并且允许以期望的方式执行具有不同构造、大小、形状、材料和纸厚的不同包装材料坯料或片材的多个堆的拆堆,而不需要改变其功能元件。
技术实现要素:
17.在本发明的一个方面中,提供了用于使可折叠坯料的片材从其一个或多个堆中解套叠的解套叠设备。该解套叠工具包括一个或多个闭环输送轨道,其包括通过拆堆装置移动机构而移动地构造在其上的多组拆堆装置。该解套叠设备还包括一个或多个堆叠仓,各个堆叠仓适于保持待一个或多个解套叠的片材堆。在操作中,多组拆堆装置中的每一组适于选择性地接合来自堆叠仓中的至少一个的最上面的片材,并将其排出到出料输送机上。从一个或多个堆中拾取片材可以以各种期望的顺序来顺序地或同时地执行,以便以任何期望的方式将拾取的片材一个在另一个旁边或以重叠的方式(即一个在另一个上方)排出。
18.通常,附接到包装材料片材或坯料的拆堆装置可以是常规已知的吸盘和/或真空吸盘,该吸盘和/或真空吸盘具有大体钟形的结构并且由通常柔软的材料(例如橡胶、硅等)形成,该材料不能透过空气,或者拆堆装置可以是临时附接物品(保持到物品上)的多种装置中的任何一者,这些装置包括销、夹紧、磁、静电、范德华力、伯努利非接触抽吸的方法,仅举几例。
19.可选地,拆堆装置移动机构包括多个拆堆突块,各个拆堆突块适于通过接合装置与多组一个或多个拆堆装置中的一组移动地接合。
20.进一步可选地,各个拆堆突块通过一个或多个拆堆移动件移动地构造到闭环输送轨道中的一个上,这些拆堆移动件移动地构造在闭环输送轨道上。
21.在一具体实施例中,解套叠设备包括一个、或两个或更多个大体平行的闭环输送轨道,这些闭环输送轨道的间距和绝对位置可相对于机器基准水平地调节,并且其中,拆堆装置移动机构包括多个拆堆突块,其通过一个或多个拆堆移动件移动地构造到平行的闭环输送轨道上,这些拆堆移动件移动地构造在闭环输送轨道上,并且其中,平行的闭环输送轨道上的拆堆移动件被独立地控制,以在所拾取的片材平移的同时实现受控的升高或降低。
22.可能地,接合装置可以是适于将一个或多个拆堆装置支撑到拆堆突块上的任何常规已知的机构,并且选自但不限于支撑板中的一个或多个。替代性地,接合装置包括铰接接合组件,其将多组一个或多个拆堆装置中的一组移动地接合到一个或多个拆堆突块上,并且适于提供大体垂直和/或横向移动以及纵向移动,从而使得能够从堆叠仓中的一个拾取片材。
23.可能地,铰接接合组件包括铰接支架,其具有通过第一拆堆突块连接到第一拆堆移动件的第一端、通过第二拆堆突块连接到第二拆堆移动件的第二开口端、以及连接到上面构造有一个或多个拆堆装置的支撑板的可枢转移动的中心端,使得拆堆移动件朝向和/或远离彼此的纵向移动使得能够大体垂直移动到支撑板并进而移动到一个或多个拆堆装置,以便拾取定位在距其一定距离处的片材。因此,通过改变第一拆堆移动件与第二拆堆移动件之间的相对距离,可以调节拆堆装置相对于待拾取的最上面片材(即所谓的拾取平面)的位置。
24.在另一实施例中,可能地,铰接接合组件包括铰接支架,其具有通过第一拆堆突块连接到第一拆堆移动件的第一端、通过第二拆堆突块连接到第二拆堆移动件的第二端、通过第三拆堆突块连接到第三拆堆移动件的第三端、以及连接到上面构造有一个或多个拆堆装置的支撑板的可枢转移动的中心端,使得拆堆移动件朝向和/或远离彼此的纵向移动使得能够大体垂直移动到支撑板而且控制支撑板和拾取装置与拆堆机构的拾取平面的接近、接触和平移的角度,以便具有额外的自由度来优化与如此拾取的包装材料坯料的接触、附接和加速离开。
25.进一步可能地,支撑板是可大体水平旋转的板,该板便于由一个或多个拆堆装置拾取的片材的旋转。
26.在本发明的实施例中,拆堆装置移动机构可适于在提升最上面片材之前拾取最上面片材时水平移动拆堆装置。提升之前的水平移动倾向于使片材飞离之后的片材并倾向于建立气隙,因此增强片材的分离。
27.在根据本发明的特定实施例中,解套叠设备还可以包括装置,其用于迫使所拾取的片材的下侧抵靠用于在相对于输送方向相反的方向上将摩擦施加到最上面的片材的下侧的装置。用于迫使的装置可以是吹风机,该吹风机在所拾取的片材的顶侧上吹风,使得片材的下侧靠在用于施加摩擦的装置(例如反向旋转轮或带)上。通过迫使所拾取的片材的下侧抵靠用于施加反向作用摩擦的装置,一个或多个片材跟随所拾取片材的任何趋势被抵消,使得任何重复的片材被推回到仓的外壳中。
28.在另一实施例中,解套叠设备包括两个平行的所述闭环输送轨道和用于改变所述两个平行轨道之间的距离以及所述两个平行轨道相对于机器的基准的位置的移动机构,从而使得能够拾取各种大小的片材并且能够在拾取操作期间附接在不同大小和形状的片材的某处。
29.可选地,一个或多个堆叠仓是适于使用竖直移动机构在顶部位置p
t
与底部位置pb之间移动的可竖直移动支撑架。
30.进一步可选地,竖直移动包括竖直轨条,其包括移动地构造在其上的一个或多个堆叠移动件,并且各个堆叠移动件使用连接构件接合支撑架,使得堆叠构件可通过堆叠移动件在顶部位置p
t
与底部位置pb之间移动。
31.替代性地,竖直移动机构可以是任何合适的移动机构。
32.可能地,堆叠仓的顶部位置p
t
定位在远离与底部位置pb对应的底部平台的高度h
t
处,使得堆的顶部片材定位在适于由至少一组拆堆装置拾取的高度hs处。
33.通常,解套叠设备还包括可缩回的提升装置,其定位在一个或多个堆叠仓上方并且适于支撑片材的至少一个子堆,使得对应子堆的顶部片材定位在适于由至少一个拆堆装置拾取的高度hs处。
34.进一步地,可缩回提升装置适于可竖直移动,使得在移除顶部片材之后,下一个顶部片材总是定位在适于由一个或多个拆堆装置拾取的高度hs处。
35.此外,可缩回的提升装置被构造为一旦支撑在其上的各个片材被一个或多个拆堆装置拾取就缩回并移回到其底部位置。
36.另外,可缩回提升装置还被构造为在其底部位置打开和拾取片材的另一子堆。
37.可能地,该设备还包括进给输送线,其连接到一个或多个堆,使得一旦在底部位置接收空仓,该空仓就被新的片材堆补充。
38.可选地,堆叠仓可以是水平移动的输送机。
39.可选地,一个或多个闭环输送轨道、提升板、和一个或多个堆叠仓适于以预定间距移动,以便将一个或多个片材的堆连续地解套叠到出料输送机上。
40.可选地,一个或多个闭环输送轨道、提升板、和一个或多个堆叠仓适于根据需要以可变间距间歇地移动,以便将一个或多个片材的堆间歇地解套叠到出料输送机上。
41.优选地,堆叠仓的竖直移动被构造为使得当提升板处于其缩回位置时,堆叠仓处于其顶部位置,使得顶部片材定位在适于由一个或多个拆堆装置拾取的高度hs处。
42.可选地,解套叠设备包括第一动力装置,其使得一个或多个闭环输送轨道、进给输送机、可缩回提升装置、堆叠仓和出料输送机中的每一个能够移动。
43.进一步可选地,第一动力装置可以选自但不限于各种常规已知的直线电机、异步电机、机器、伺服驱动器等本领域中常规已知的一者或多者。
44.可能地,闭环输送轨道上的多个移动件中的每一者由优选为直线电机的第二动力装置单独地提供动力,该第二动力装置利用各个移动件作为其转子并利用对应的轨道作为其定子。替代性地,可使用适于以独立且受控的方式推进移动件的任何其它类型的驱动装置。
45.替代性地,第二动力装置可以选自但不限于各种常规已知的异步电机、机器、伺服驱动器等本领域中常规已知的一者或多者。
46.另外,拆堆装置和拆堆移动机构可例如经由拆堆移动件上的滑动触点而无线地供电,并且优选地例如通过向拆堆移动件提供感应电力而非接触地供电。进一步地,拆堆装置及其移动机构可以无线控制,包括但不限于短距离无线(例如蓝牙、红外、微波、wlan、窄带到宽带电信等),优选地与无线供电相结合。无线机器控制和非接触式电源实现再循环拆堆装置的高度灵活、大范围、无约束的移动和运动受控的操作,以实现高效的解套叠操作。
47.特别地,可折叠坯料的片材由选自但不限于纸板、瓦楞纸板、热塑性塑料、混合材料、层压板等中的一者或多者的材料形成。
48.可能地,解套叠设备还包括控制单元,其用于优化一个或多个闭环输送轨道、一个或多个拆堆装置、一个或多个堆叠仓、可缩回的提升装置、以及进给输送线的移动。
49.进一步可能地,控制单元包括一个或多个传感器、一个或多个输入单元、处理器单元和输出单元。
50.在一特定实施例中,该设备可包括:一个或多个传感器,其使得能够实时在线测量拆堆装置与要拾取的仓的最上面的片材之间的距离;和控制单元,其动态地控制和调节拆堆装置的位置和到达范围,以获得最佳性能。
51.在根据本发明的另外特定实施例中,解套叠设备可以包括两个闭环输送轨道,并且一个或多个传感器可以在将拾取的片材移动到出料输送机上的同时测量拾取的片材(优选地为其前缘)的位置,并且控制单元可以控制和调节相应闭环输送轨道的解堆叠移动件相对于彼此的位置,以校正拾取的片材的任何角度和/或平移的错位。
52.解套叠设备可以包括:两个或更多个传感器,其使得能够实时在线测量任何拾取的片材或包装材料坯料的角度和位置对准;和控制单元,其动态地调节在大体平行的闭环轨道之间彼此相对的安装移动件的解套叠机构的相对位置、或者解套叠机构的受控旋转,以动态地校正任何角度或平移误差。
53.进一步地,解套叠设备可以包括一个或多个传感器,其使得能够实时在线检测两个或更多个片材拾取并且启动将所拾取的片材压靠在所述反作用摩擦装置上的装置,以对抗多片材拾取并且将多余的片材返回到堆叠仓。传感器还将使得能够检测任何无拾取,从而调用机器的总体产品装载功能内的适当补救动作。
54.在本发明的又一方面,提供了一种使用本发明的解套叠设备对各自支撑到对应的堆叠仓上的一个或多个片材堆进行解套叠的方法。该方法包括:接收一个或多个预定材料的片材堆。该方法还包括:以预定方式顺序地或者同时地从一个或多个堆中拾取顶部片材。该方法还包括:以任何期望的方式将拾取的片材一个在另一个旁边或者一个在另一个上方地放置到出料输送机上。
55.可选地,该方法包括:在将拾取的片材放置到出料输送机上之前旋转拾取的片材。
56.可选地,该方法包括:在将拾取的片材放置到出料输送机上之前使拾取的片材成型、折叠、拉伸或以其它方式成形,或者使拾取的片材与已经在解套叠系统内拾取的另一包装材料合并或组装。
57.可选地,从一个或多个堆中拾取一个或多个片材的步骤包括以下步骤:使至少一个或多个拆堆装置与堆中的一个接触,使得堆的顶部片材由对应的拆堆装置拾取。
58.可选地,该方法包括:一次顺序地拾取一个片材。
59.替代性地,该方法包括:一次同时拾取多于一个的片材。
60.进一步替代性地,该方法包括:将同时拾取的片材一个在另一个旁边同时或者以其它方式一个在另一个上方地顺序放下。
61.可能地,该方法包括:以预定顺序的竖直移动和/或横向移动和/或纵向移动将一对或多对拆堆凸块中的每一对一起移动,以便将对应的拆堆装置定位为与期望的片材堆的顶部片材接触。
62.进一步可能地,推动顺序由控制单元基于来自用户的输入和/或来自一个或多个传感器的输入来确定。
63.本文所公开的主题的其他方面、特征和优点将从描述、附图和权利要求书变得明显。
附图说明
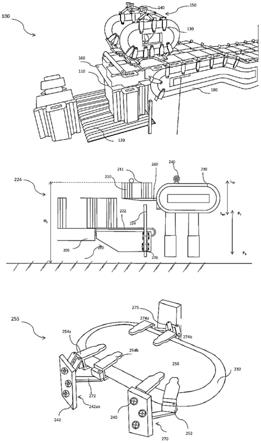
64.图1例示了表示根据本发明优选实施例的解套叠设备的示意图;
65.图2例示了表示根据本发明另一优选实施例的另一示例性解套叠设备的示意图;
66.图3a、图3b、图3c、图3d例示了表示根据本发明优选实施例的处于不同步骤的示例性解套叠设备的前视图;
67.图4a例示了表示根据本发明优选实施例的示例性接合装置的透视图;以及
68.图4b例示了表示根据本发明另一实施例的另一示例性接合装置的透视图。
具体实施方式
69.本技术公开了一种解套叠设备,该解套叠设备用于以任何期望的顺序从一个或多个堆中单独地拾取片材、并且以任何期望的方式将片材排出到出料输送机上。该解套叠设备在高效的同时能够从具有不同形状、大小、材料和纸厚(厚度)的片材的多个堆中将片材拆堆,而不需要其功能元件的任何改变。进一步地,片材可以同时或以其它方式顺序地拾取,并且可以以同步的方式动态地排出到出料输送机上,其中片材连续地或以其它方式间歇地并且以变化的构造、速度等、一个在另一个旁边或以其它方式一个在另一个上方放置,而不在设备内进行任何物理变化。
70.如图1例示的,本发明提供了一种解套叠设备100,该解套叠设备100用于将一个或多个片材堆110单独地拆堆,并将片材以同步的方式输送到出料输送机180的附接装置(未示出)上。
71.该解套叠设备100包括一个或多个架空闭环输送轨道130,其包括通过拆堆装置移动机构150而移动地构造在其上的多组拆堆装置140。解套叠设备100还包括一个或多个堆叠仓120,各个堆叠仓120适于支撑一个或多个片材堆110中的一者。进一步地,各个堆叠仓120连接到承载片材堆110的供应的进入输送线(未示出)。此外,解套叠设备100包括可缩回的提升机构160,其适于支撑片材堆110的至少一个子堆,使得顶部片材定位在适于由多组拆堆装置140中的至少一组拾取的高度处。在操作中,首先将一个或多个片材堆110定位到一个或多个堆叠仓120上。其后,朝向一个或多个堆110中的一者移动地定位一组或多组拆堆装置140,使得来自至少一个堆叠仓120的顶部片材以任何期望的顺序拾取,并以任何期望的方式朝向出料输送机180排出。
72.在以下图2的描述中,除非另有说明,否则与示意性系统共有的元件将具有相同的
附图标记。在第一优选实施例中,如图2例示的,示例性的解套叠设备200具有单个闭环输送轨道230,其用于将一个或多个片材堆210解套叠到出料输送机280上,该片材堆210包括定位到第一堆叠仓220a上的第一堆210a和定位到第二堆叠仓120b上的第二堆210b。
73.闭环输送轨道230包括多组一个或多个拆堆装置240,其通过拆堆装置移动机构250移动地构造在闭环输送轨道230上。拆堆装置移动机构250包括多个拆堆突块252(图5a、图5b),各个拆堆突块252通过拆堆移动件254(图4a、图4b)移动地构造到闭环输送轨道230上。进一步地,各个拆堆突块252适于通过接合装置255(图4a)接合到至少一组拆堆装置240。在本发明优选实施例中,接合装置255包括铰接接合组件270,其将多组一个或多个拆堆装置240中的一组移动地接合到一个或多个拆堆突块252上。在这种实施例中,各组一个或多个拆堆装置240定位到支撑板242上,该支撑板242具有连接到一对拆堆移动件254a、254b上的第一侧242a,该对拆堆移动件254a、254b通过一个或多个铰接安装支架272来可枢转地且可移动地彼此附接。铰接支架272是常规地已知的安装支架,并且包括第一附接支架274,其在连接点c处在其远端处连接到第二附接支架276,使得铰接支架具有三个开口端,即,在第一附接支架274的近端处的第一开口端274a、在第二附接支架276的近端处的第二开口端276a、以及在连接点c处的可枢转移动的中心端275。
74.进一步地,如图4a例示的,铰接移动组件270包括第一拆堆移动件254a,其通过铰接安装支架272连接到第二拆堆移动件254b,移动件254a、254b中的每一者在铰接支架272的开口端274a、274b中的一者处连接,使得铰接支架272在第一移动件254a和第二移动件254b的整个纵向运动范围内在与轨道大体垂直的平面中朝向彼此和/或远离彼此可枢转地移动。铰接组件270在其可枢转移动的中心端275处连接到支撑板242的第一侧242a。
75.在铰接安装支架272闭合使得一对枢转连接的拆堆移动件254a、254b中的每一者定向在大致重合的位置的折叠位置,支撑板242处于其初始位置。在铰接安装支架272枢转地打开的打开位置,该对移动件254a、254b可朝向或远离彼此移动,使得对应的支撑板242垂直于移动件穿过所沿着的轨道移动,即向上或枢转地朝向或远离对应的拆堆突块252a、252b移动。
76.本领域技术人员将认识到,具有该对移动件254a、254b的铰接移动组件270被枢转地连接,以便以常规方式在大体水平的平面内纵向移动。铰接移动组件270被移动地支撑在闭环输送轨道230上,使得移动件254a、254b可以朝向和远离彼此水平纵向移动。该对移动件254a、254b的这种移动提供了操作动力,该操作动力用于使得安装支架272能够在其折叠位置与其打开位置之间移动,从而实现一定范围的竖直向上和枢转延伸以及成形支撑板242到闭环输送轨道230上的纵向移动。
77.因此,通过适当地操纵第一移动件254a和第二移动件254b并因此操纵铰接组件270,支撑板242和对应的一组拆堆装置240可定位在远离拆堆突块252的任何期望距离处,同时在操作取向上大体沿竖直和/或横向和/或水平方向移动。
78.在另一些实施例中,接合装置255可以是适于将一组一个或多个拆堆装置240支撑到拆堆突块252上的任何常规已知的机构,并且选自但不限于如图4b例示的一个或多个支撑板。
79.在第一实施例的修改例中,如图2例示的,解套叠设备200包括多个并且优选地一对架空闭环输送轨道230(即230a、230b),其用于对包括定位到第一堆叠仓220a上的第一堆
210a和定位到第二堆叠仓220b上的第二堆210b的一个或多个堆210进行解套叠。
80.在这种实施例中,在需要同时拾取和放下堆210内的片材到出料输送机280上的情况下,轨道230a、230b中的每一者的多组拆堆装置240的单独移动可以通过用作预定堆210的专用轨道230或者通过其他方式来加速过程。在另一些实施例中,两个轨道的拆堆装置240可适于顺序地或同时地从同一堆210拾取顶部片材。在另一些实施例中,可以以任何可能的方式利用一对轨道230a、230b的拆堆装置组,以便将一个或多个堆210拆堆到出料输送机280上。
81.该实施例是特别有利的,因为该实施例提供了多个闭环输送轨道230,因此提供了分别由单个轻质动力装置提供动力的拆堆装置240,以便管理解套叠设备200的操作,因此该实施例被认为是实现本发明的各个实施例的另外高效方式。
82.图2示意性地示出了本发明的解套叠设备200的基本部件的布置。然而,在商业功能单元的构造中,用于与输送系统一起使用的辅助部件(例如联接器、连接器、支撑结构和为解套叠设备领域的技术人员所知的其它功能部件)、更特别地为可折叠坯料的解套叠部件可以被结合在解套叠设备200内。只要存在本文所公开的结构部件和布置,这样的商业布置就包括在本发明中。因此,可以设想的是,在不偏离本发明的范围的情况下,解套叠设备200可以构造为用于具有任何可能的形状的任何种类的可折叠坯料。
83.在优选实施例中,一个或多个片材堆210可由多个呈可折叠坯料形式的片材形成,各个片材适于形成初级或二次包装和/或其部件。例如,如图2例示的,定位到第一堆叠仓220a上的第一堆210a可以是多个坯料的堆,各个坯料适于形成盒形的二次包装。进一步地,定位到第二堆叠仓220b上的第二堆210b可以是多个分隔片材的堆,各个分隔片材适于形成用于盒形二次包装的分隔件。然而,在其它实施例中,片材堆210可以包括任何数量的片材堆,这些片材堆适于形成任何种类的输出产品,适于使用本发明的设备200解套叠。堆叠仓220a、220b中的每一者连接到进入输送线205,各个输送线205分别承载片材堆220a、220b的供应。
84.在一实施例中,参考图3a至图3d,堆叠仓220通常是可竖直移动的储存架222,该储存架222适于通过竖直移动机构224在顶部位置p
t
与底部位置pb之间移动。顶部位置p
t
定位在远离与底部位置pb对应的底部平台的高度h
t
处,使得堆210的顶部片材定位在适于由至少一组拆堆装置240拾取的高度hs处。
85.进一步地,在这种实施例中,在优选的情况下,如图3例示的,竖直移动机构224包括竖直轨条(未示出),其定位于储存架222旁边,具有一个或多个移动地构造在其上的堆叠移动件226,并且适于使用连接构件(未示出)接合储存架222,使得储存架222可通过堆叠移动件226在其顶部位置p
t
与底部位置pb之间移动。
86.然而,在其它情况下,竖直移动机构224可以是任何合适的移动机构。
87.解套叠设备200还包括图3a至图3d中例示的可缩回的提升装置260,其定位在一个或多个堆叠仓220中的每一者上方并且适于支撑片材的至少一个子堆,使得顶部片材定位在适于至少由一个或多个闭环输送轨道230的一组拆堆装置240拾取的高度hs处。
88.在一实施例中,可缩回提升装置260通常是平的提升板,并且可在其底部位置l
bp
与顶部位置l
tp
之间竖直移动,使得在任何时刻,使顶部片材定位在适于由至少一组拆堆装置240拾取的hs处。进一步地,可缩回装置260可在打开位置po与缩回位置pr(未示出)之间移
动。这种提升板也可以替代性地由多个可以远离或朝向彼此移动的叉子构成。
89.在一些情况下,如图3a例示的,可缩回提升装置260的底部位置l
bp
与堆叠仓220的储存架222的顶部位置p
t
大体相同,使得当从缩回位置pr移动到打开位置po时,可缩回提升装置260将整个堆210支撑在其上。进一步地,在这种情况下,提升装置260竖直移动,将各个顶部片材移除到与片材的厚度相同的距离,使得顶部片材总是定位在高度hs处。提升装置260的顶部位置l
tp
使得堆210的最底部的片材215(图3d)被定位为顶部片材。一旦堆210已经完全解套叠,提升装置260就适于缩回到缩回位置pr,并竖直向下移动到底部位置l
bp
。
90.出料输送机280通常是输出输送机,其在距底部平台大致类似于顶部片材的高度h
t
的高度hc处大致定位在一个或多个闭环输送轨道230下方,使得已经拾取的顶部片材可以适当地拖和/或放到出料输送机280上,以便进一步处理。
91.解套叠设备200还包括第一动力装置(未示出),其用于使得一个或多个闭环输送轨道230、进给输送机205、一个或多个堆叠仓220中的每一个、可缩回提升机构260、出料输送机280及其各种子部件能够移动。在一优选实施例中,第一动力装置是直线伺服电机,该直线伺服电机适于使一个或多个闭环输送轨道230、进给输送机205、一个或多个堆叠仓220中的每一个、可缩回提升机构260、出料输送机280中的每一个以第一预定间距移动,从而便于解套叠设备200的各个部件的连续操作,使得片材堆210的进入供应以任何期望的顺序和以任何期望的方式连续地解套叠并传送到出料输送机280上。然而,在其它实施例中,第一动力装置是直线伺服电机,该直线伺服电机适于使一个或多个闭环输送轨道230、进给输送机205、一个或多个堆叠仓220中的每一个、可缩回提升机构260、出料输送机280中的每一个以可动态调节的可变间距移动,从而便于解套叠设备200的各个部件的间歇操作,使得片材的堆210的进入供应间歇地且在期望时解套叠并传送到出料输送机280上。
92.解套叠设备200还包括第二动力装置(未示出),其用于使得包括拆堆移动件254和可选的堆叠移动件226的各个移动件能够沿着相应的轨道和/或轨条受控地独立移动。在一优选实施例中,第一动力装置是直线伺服电机或其等同物,其提供各个移动件的独立运动控制。在这种实施例中,直线电机是本领域常规已知的一般移动磁体类型的电机。进一步地,在这样的实施例中,直线电机利用对应的轨道和/或轨条作为其定子,并且利用各个移动件作为其转子。
93.在其它实施例中,移动件254、226用作定子,而轨道或轨条用作转子。在这样的实施例中,移动件254、226中的每一者可以包括内置线圈,并且对应轨道或轨条中的每一者可以包括沿纵向方向构造在其上的磁体,使得移动件能够进行电磁相互作用,从而使移动件能够移动。
94.解套叠设备200还可以包括一个或多个控制单元(未示出),其用于管理解套叠设备的操作,并且特别地用于管理第一动力装置和/或第二动力装置的工作,并且更特别地用于管理拆堆移动件254a和254b的移动,以便优化支撑板242(因此一个或多个支撑垫240)以预定顺序的纵向和/或竖直和/或横向移动的顺序。在从一个或多个堆210拾取顶部片材211必须遵循特定的预定顺序的情况下,特别需要评估预定顺序。
95.在一些实施例中,控制单元可以包括输入单元,其用于接收与使堆210解套叠的预定顺序以及将已经拾取的顶部片材211排出到出料输送机280上的期望方式相关的输入。进一步地,控制单元可以包括多个传感器(未示出),其用于跟踪参数(例如待排出的片材或坯
料的位置、宽度和/或高度、片材或坯料错位等),感测一个或多个堆210何时为空,感测提升装置是否到达其顶部位置等。控制单元还可包括处理器单元,其用于基于预定逻辑/规则处理由输入单元捕获的数据,以便于多个移动件254、226的移动、堆叠仓220的竖直移动以及可缩回的提升机构260的移动。控制单元还可以包括指令单元,其将指令传递到各种部件(例如各种动力装置、直线电机、电机、驱动单元等),以便于期望且平滑的操作。
96.在一些实施例中,控制单元可以作为计算机程序产品提供,例如可以包括计算机可读存储介质或非瞬态机器可读介质,其维持可由计算机或其他电子设备解释的指令,例如以执行一个或多个过程。
97.在一些实施例中,堆210的多个片材中的每一者通常由可回收材料形成,该可回收材料选自但不限于任何期望材料(例如包括所有种类的纸张、纤维板、瓦楞纸板、可折叠坯料、混合材料、层压板、或它们的任何组合)中的一者或多者。进一步地,形状和大小(包括片材或坯料的厚度)以及表面光洁度可以根据设计约束和其应用的要求而变化。在一些其它实施例中,片材或坯料可以由轻质塑料材料制成,该轻质塑料材料选自但不限于塑料材料(例如包括乙缩醛、丙烯酸、醋酸纤维素、聚乙烯、聚苯乙烯、乙烯基和尼龙的热塑性塑料的组)中的一者或多者。在另一些实施例中,片材或坯料可由适于使用本发明的解套叠设备200解套叠的任何材料制成。
98.在一实施例中,一个或多个拆堆装置240由常规已知的吸盘和/或真空吸盘形成,该吸盘和/或真空吸盘具有大体钟形的结构并且由通常柔软的材料(例如橡胶、硅等)形成,该材料不能透过空气。如本领域技术人员所预期的,当对平坦表面(例如片材)施加力时,这种拆堆装置240已经广泛地用于通过施加在物体内产生的真空来提升物体。这种拆堆装置240的数量、大小和尺寸基于从堆210中拾取的片材或坯料的重量、尺寸和材料来确定。在一些实施例中,在片材或坯料是重材料的情况下,解套叠设备200还可以设置有例如真空产生器形式的负压供应部,该负压供应部可以由拆堆装置240用于拾取这种重片材。
99.在一特定实施例中,可在施加点处、在拾取循环周围的任何位置处施加可变吸力或真空,以便实现较快的循环时间。进一步地,吸力或真空的控制可以避免片材变形,并且避免通过多孔材料作用并且影响片材的多孔主要材料后面的可选的其它材料的抽吸效应。
100.在另一实施例中,在排出片材时,到吸盘或真空吸盘的气流可以反向,从而迅速地消除真空并施加快速排出力。
101.可以设想,尽管在示例性实施例中将堆210的数量描述为两个,但是在不偏离本发明的范围的情况下并且取决于要形成的包装的设计约束,本发明可以用于任何数量的堆。例如,在一些情况下,一个或多个堆210可以包括可折叠的纸箱坯料的第一堆210a、用于纸箱的分隔件的第二堆210b、保持用于形成纸箱的把手的片材的第三堆210c等。在其它实施例中,解套叠设备200可用于仅对单个堆210进行解套叠。在所有这样的实施例中,堆叠仓220的数量保持等于堆210的数量,以便在其上单独地支撑堆210。
102.在本发明的优选实施例中,包括一个或多个闭环输送轨道230、进给输送机205和接收输送机280的解套叠设备200的各个输送机通常是本领域中常规已知的竖直定位的闭环输送轨道。在其它实施例中,包括一个或多个闭环输送轨道230、进给输送机205和出料输送机280的解套叠设备200的各个输送机可以是大体水平定位的闭环输送轨道。在本发明的另一些实施例中,包括一个或多个闭环输送轨道230、进给输送机205和接收输送机280的解
套叠设备200的各个输送机可以构造为几乎闭环的输送机。
103.如本领域已知的,几乎闭环的输送机通常是类似于圆形输送机的闭环输送机,其中,在两端上的输送机的圆形连接边缘由适于来回移动并且避免了使移动件移动通过闭环输送轨道的整个圆周的需要的可直线移位的输送机部分代替,并且因此是常规已知的闭环输送轨道的非常快速的替代方案。进一步地,由纵向轨条制成的闭环输送机因此比任何常规已知的闭环输送轨道和/或输送机更具成本效率。另外,前后移动还可有助于提供额外的压力,同时因此更优选执行例如推动操作的操作。
104.虽然堆叠仓220被公开为大体可竖直移动的支撑架222,但是在一些实施例中,堆叠仓220可以相对于竖直或水平输送机(未示出)倾斜,该竖直或水平输送机适于接收片材或坯料的堆210的供应,使得一个堆210的顶部片材定位在适于由一个或多个拆堆装置240拾取的距离处。进一步地,一旦堆210几乎用尽,则将另一堆210定位在适于由一个或多个拆堆装置240拾取的距离处,使得在它们之间没有中断。
105.在使用中,如先前所公开的,解套叠设备200适于定位到包装制造单元的输入线上,该包装制造单元设置有用于形成大体盒形的次级包装的可折叠坯料的一个或多个堆210。解套叠设备200以任何预定顺序将可折叠坯料从放置到一个或多个堆叠仓220上的一个或多个堆210解套叠并且以任何期望的方式放置到出料输送机280上。各个堆210以大体自上而下的方式解套叠,然而,并不限于任何特定的解套叠方式,因此可以设想,本发明的解套叠设备可以用于以任何可能的方式执行解套叠操作,而不脱离本发明的范围。
106.参考图1至图4,图5是例示了使用本发明的解套叠设备200以任何期望的方式将片材或坯料以一个在另一个旁边或者以重叠的方式同时或顺序地从放置到一个或多个堆叠仓220上的一个或多个片材或坯料堆210中拆堆的方法600的流程图。
107.本发明涉及解套叠设备200,该解套叠设备200用于将片材以恒定和/或可变的速度连续地和/或间歇地以任何期望的顺序从一个或多个堆中单独地拆堆,并且以任何期望的方式将片材排出到出料输送机上。
108.另外,向一组或多组拆堆装置240提供不同种类的推动顺序的可能性允许以任何期望的顺序拾取顶部片材211并以任何期望的方式排出。除了完全控制片材放置的速度、方向之外,这种优化和集中的拾取和放下片材还允许以下可能性:使用相同的输送线来一起排出多个片材,同时利用出料输送机的宽度,并且避免错位,因此避免对通过其排出的片材的任何损坏。
109.特别地,本发明的另外优点在于根据要实现的包装的预定形状和构造来提供包装的不同子部分的包装设备的输入线。
110.进一步地,解套叠工具可适应于不同尺寸的可折叠坯料,因此非常适于容易且高效地处理不同大小和形状的包装,并且不需要改变整个设备来对不同预定形状和大小的片材进行解套叠。
111.进一步地,本发明提供了制造具有一体形成的解套叠设备200的输送系统的可能性。这种用于形成二次包装的输送系统在成本有效的同时使用起来非常快速和容易,并且提供了对任何形状、大小或任何种类的构造的包装的舒适处理。
112.另外,本发明的解套叠设备在可应用于输送系统上的同时不影响输送过程的其余部分。单个输送系统可以在相同的布置内使用尽可能多的解套叠设备。进一步地,在一个解
套叠设备不工作的情况下,其余的解套叠设备可以保持工作,因此,可以提高设备的容错性。
113.尽管已经参考可折叠的坯料公开了本发明的解套叠设备200,但是该解套叠设备200可以用于对所有当前已知的片材类型(例如由诸如热塑性塑料、混合材料、可以包括黑色金属或有色金属的编织金属织物等的材料或任何其它合适的材料构成)进行解套叠。即使在要拾取重片材的情况下,也可以根据需要改变拆堆装置240的强度或数量,而不必改变整个设备200。
114.而且,本领域技术人员还可设想,本发明的解套叠设备200可以在各种行业中实现,例如食品行业、运输行业、用于任何形状、大小或任何种类的构造的任何种类的产品或产品组的解套叠中的家用电器行业,而不限于包装行业。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。