技术特征:
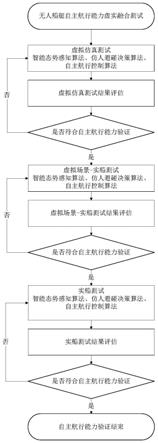
1.一种无人船艇自主航行能力虚实融合测试评估方法,其特征在于,包括:s1、对智能感知算法、仿人避碰决策算法和自主航行控制算法进行虚拟仿真测试验证;s2、对步骤s1中得到的验证结果进行评估;s3、在步骤s2的评估结果符合自主航行要求条件下,对智能感知算法、仿人避碰决策算法和自主航行控制算法进行虚拟场景-实船测试验证;s4、对步骤s3中得到的虚拟场景-实船测试验证结果进行评估;s5、在步骤s4的评估结果符合自主航行要求的条件下,对智能感知算法、仿人避碰决策算法和自主航行控制算法进行实船测试验证;若不符合要求,则需优化算法,再次进行虚拟场景-实船测试验证;s6、对步骤s5中得到的实船测试验证结果进行评估;s7、若步骤s6中得到的评估结果符合自主航行要求的条件,则实船测试结束;若不符合要求,则需优化算法,再次进行实船测试验证,在真实海洋测试场内将海洋航行环境信息作为智能感知算法、仿人避碰决策算法、自主航行控制算法的输入,相关算法根据输入信息操控实船运动。2.根据权利要求1所述的无人船艇自主航行能力虚实融合测试评估方法,其特征在于,所述步骤s1中,所述虚拟仿真测试验证,具体是:采用三维建模技术设计三维虚拟船艇模型、海上助航航标三维虚拟物标模型、三维虚拟港口建筑模型,构建虚拟测试场景,其中为三维虚拟船艇添加nomoto/norrbin/mmg操纵运动数学模型;将虚拟测试场景内的环境信息作为智能感知算法、仿人避碰决策算法、自主航行控制算法的输入,相关算法的输出操控虚拟船艇自主航行。3.根据权利要求1所述的无人船艇自主航行能力虚实融合测试评估方法,其特征在于,所述步骤s3和步骤s5中的虚拟场景-实船测试验证,具体是:在虚拟仿真测试验证的基础上,将智能感知算法、仿人避碰决策算法、自主航行控制算法操控船艇由虚拟无人船艇替换成实际无人船艇,将虚拟测试场景内信息作为算法的输入端,算法将输入信息融合处理后对实船进行操控。4.根据权利要求1所述的无人船艇自主航行能力虚实融合测试评估方法,其特征在于,所述步骤s2、步骤s4和步骤s6中,对验证结果进行评估具体是:对智能态势感知算法、仿人避碰决策算法、自主航行控制算法的单项基本评估和综合高级评估;评估过程包括:对评估指标的权重确定,根据评估规则得到评估矩阵,对测试结果数据的量化处理,将处理得到的结果与权重进行合成得到最终评估结果;对评估指标进行重要度标定,形成判断矩阵,对判断矩阵进行归一化处理得到权重向量,对权重进行一致性检验。5.一种基于上述权利要求1-4中任意一项所述无人船艇自主航行能力虚实融合测试评估方法的无人船艇虚实融合实训教学平台,其特征在于,包括五层结构,且每一层都为其上层提供服务,直到完成具体虚拟实验教学环境的构建,五层结构分别为数据层、支撑层、通用服务层、仿真层以及应用层,其中:所述数据层,用于实现对相应数据的存放和管理,相应数据包括仿真模型库、课程库、场景库、试题及答案库、规则库、实验数据以及用户信息;
所述支撑层,用于整个基础系统的运行、维护和管理,支撑层的功能子系统包括安全管理、服务容器、数据管理、资源管理与监控、域管理、域间信息服务;所述通用服务层,用于提供虚拟实验教学环境的通用支持组件,包括学生端管理平台、教师端管理平台和管理员端管理平台;所述仿真层,用于为所述通用服务层提供实验结果数据的格式化输出,进行相应的船艇建模、测试场景构建、虚拟仪器开发、提供通用的仿真器;所述应用层,用于底层的服务,最终实现无人船艇虚实融合实训教学,包括教学平台、实训平台、测试评估平台和考核平台。6.根据权利要求5所述的无人船艇虚实融合实训教学平台,其特征在于,所述通用服务层中:所述学生端管理平台,包括消息通知模块、签到模块、发送与接收模块、互动答疑模块、课务查询模块、平台选择模块;其中,消息通知模块用于接收来自教师端和管理员端发送的相关通知和消息;签到模块用于学生课前课后签到或缺课请假;发送与接收模块用于学生接收课件资料、文本文档等或提交作业;互动答疑模块,用于学生与学生之间或学生与老师之间的互动答疑和学术交流;课务查询模块,用于学生查阅课程计划、教务安排、考核成绩;平台选择模块用于学生根据实际需求选择对应的平台,包括教学平台、实训平台、测试评估平台、考核平台;所述教师端管理平台,包括消息通知模块、课业管理模块、发送与接收模块、互动答疑模块、教师信息模块、平台选择模块;其中,消息通知模块用于接收管理员端发送的相关通知和消息或向学生端发送相关通知和消息;课业管理模块用于备课、学生签到管理、考核成绩管理;发送与接收模块用于教师向学生发送课件资料、文本文档等或接收学生提交的作业;互动答疑模块用于老师与学生之间的互动答疑和学术交流;教师信息模块用于教师更新个人主页信息;平台选择模块用于学生根据实际需求选择对应的平台,包括教学平台、实训平台、考核平台;所述管理员端管理平台,包括消息通知模块、用户管理模块,教务管理模块、平台管理模块、综合保障模块;其中,消息通知模块用于管理员端向教师端和学生端发送相关通知和消息;用户管理模块用于管理员对学生和教师的注册、管理和授权;教务管理模块用于管理员对教务、课时、审批、实验等进行安排和管理;平台管理模块,用于管理员对教学平台、实训平台、考核平台进行系统维护、功能升级;综合保障模块用于管理员对除用户管理、教务管理和平台管理事务外的其他事务的管理和支持工作。7.根据权利要求5所述的无人船艇虚实融合实训教学平台,其特征在于,所述教学平台用于在虚拟教学模式下教师向学生讲解与演示无人船艇感知与控制系统,包括离线课堂模块和在线课堂模块,其中:所述离线课堂模块,用于非上课时间段的学生自主学习,包括教学资源共享单元和学术文献共享单元;其中,教学资源共享单元用于学生课前课后自主学习专业知识和教师上传的课程资源,包括无人船艇的智能感知与自主控制方面的课件、指导书及视频资源;学术文献共享单元,用于师生共同分享学术论文及专业前沿知识;所述在线课堂模块,用于教师在线教授学生相关知识,包括艇载设备与仪器教学单元、船艇运动与建模教学单元、无人船艇智能感知教学单元、无人船艇自主控制教学单元;其
中,艇载设备与仪器教学单元包括船艇常用感知设备与仪器的原理讲解、设备外观、设备组成部分、设备操作以及感知过程的动画演示信息;船艇运动与建模教学单元包括船艇的结构、运动、以及船艇操纵航行理论与建模控制原理讲解;无人船艇智能感知教学单元,包括船艇常用感知设备与仪器的工作原理讲解及感知过程的动画演示信息;无人船艇自主控制教学单元,包括船艇自主航行原理讲解。8.根据权利要求5所述的无人船艇虚实融合实训教学平台,其特征在于,所述实训平台,用于学生对无人船艇智能感知与自主控制相关知识的基础实验、虚拟仿真实验和实船实验,包括基础实验模块、开放实验模块和外接设备管理模块,其中:所述基础实验模块,用于学生熟悉掌握船载仪器设备的使用方法及工作原理,包括船艇感知设备与仪器使用训练、船艇控制设备与装置使用训练;其中,船艇感知设备与仪器使用训练,用于训练学生对于无人船艇感知设备与仪器如电子海图、雷达、声呐等设备的工作原理、设备组成部分以及设备操作等技能;船艇控制设备与装置使用训练,用于训练学生对于无人船艇控制设备与装置的工作原理、设备组成部分及设备操作使用方面的技能;所述开放实验模块,用于学生进行无人船艇相关的虚拟仿真实验操作,包括船艇建模实验、船艇自主航行实验、感知与控制算法开发实验;其中,船艇建模实验,用于学生对无人船艇的船体、艇载传感器进行三维虚拟仿真建模实验;船艇自主航行实验,是将虚拟船艇交由自主航行算法控制,使其在真实世界投影的虚拟世界中,操控虚拟船艇,进行避碰、航向控制、航迹跟踪等自主航行操纵;感知与控制算法开发实验,用于学生进行无人船艇的感知算法开发和控制算法开发实验;所述外接设备管理模块,用于外接设备的统一管理,包括实船、感知设备与仪器、控制设备与装置、数据输入与输出接口、算法程序开发单元;其中,实船,用于船艇自主航行实验的海上控制对象、与测试评估平台进行虚拟场景-实船实验和实船实验的数据链路通信;感知设备与仪器,用于船艇感知设备如摄像头、雷达、声呐等仪器与测试评估平台进行虚拟场景-实船实验和实船实验的数据链路通信;控制设备与装置,用于控制设备与装置与测试评估平台进行虚拟场景-实船实验和实船实验的数据链路通信;算法程序开发单元,用于集成算法开发软件,进行算法开发。9.根据权利要求5所述的无人船艇虚实融合实训教学平台,其特征在于,所述测试评估平台,用于对无人船艇开发的算法进行虚拟仿真测试、虚拟场景-实船测试、实船测试并对测试结果进行评估,包括航迹跟踪与避碰算法测试、实时感知与动态路径规划算法测试、船载传感器目标检测算法测试;其中:所述航迹与避碰算法测试,用于算法的航迹控制测试评估和算法的避碰控制的测试与评估,包括航向控制测试、航迹控制测试、避碰控制测试;航向控制测试是验证所开发算法能否对无人船艇实时操控,将船艇实际航向快速、准确、稳定地调整至参考航向的测试与评估;航迹控制测试是验证所开发算法能否对无人船艇实时操控,使船艇以尽量准确地沿参考航线航行的测试与评估;避碰控制测试是验证所开发算法能否自动识别海上会遇态势并给出合理的避碰方案实现自主航行的测试与评估;实时感知与动态路径规划算法测试用于验证算法的实时感知能力和动态路径规划能力进行测试与评估,包括水面静态目标感知综合测试、水面动态目标感知综合测试、路径规划能力测试;其中,水面静态目标感知综合能力测试,是验证所开发算法能否对静态干扰目标和静态待识别目进行准确识别和感知能力
的测试与评估;水面动态目标感知综合能力测试,是验证所开发算法能否对动态干扰目标和动态待识别目标进行准确识别和感知能力的测试与评估;路径规划能力测试,是验证所开发算法能否对无人船艇的航路、航速进行合理规划能力的测试与评估。10.根据权利要求5所述的无人船艇虚实融合实训教学平台,其特征在于,所述考核平台,用于对学生用户在教学平台内所掌握的知识进行在线考核、对虚拟仿真实验进行考核同时输出考核成绩,包括理论考核和实训考核;其中:所述理论考核,包括无人船艇感知理论考核和无人船艇控制理论考核;其中,无人船艇感知理论考核,用于考查学生对无人船艇感知系统相关知识的掌握情况;无人船艇控制理论考核,用于考查学生对无人船艇控制系统相关知识的掌握情况;所述实训考核,包括无人船艇感知算法实验考核、无人船艇控制算法实验考核;其中,无人船艇感知算法实验考核,用于考查学生对感知算法开发情况;无人船艇控制算法实验考核,用于考查学生对控制算法的开发情况。
技术总结
本发明提供一种无人船艇自主航行能力虚实融合测试评估方法、实训教学平台,本发明方法,包括对智能感知算法、仿人避碰决策算法和自主航行控制算法进行虚拟仿真测试验证并对验证结果进行评估;在评估结果符合自主航行要求条件下,对前述三个算法进行虚拟场景-实船测试验证并对验证结果进行评估;在评估结果符合自主航行要求的条件下,再对前述三个算法进行实船测试验证并对实船验证结果进行评估。本发明实训教学平台,使学生加深对无人船艇智能感知与自主控制理论知识的理解与掌握,对主要设备进行全方位认识,加强对专业概念的理解和设备结构及无人船艇系统组成的认知,逐步减少和替代传统实船实验操作,以降低实际设备的高成本和高风险。成本和高风险。成本和高风险。
技术研发人员:范云生 王婷 刘弘毅 王国峰
受保护的技术使用者:大连海事大学
技术研发日:2022.01.20
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。