1.本发明涉及一种用于全站仪的半实物模拟训练方法,属于测量虚拟仿真教学领域。
背景技术:
2.全站仪作为测量的主要仪器,在多种领域的测量工作中有着不可替代的作用。现今各大高校相关专业均开设有全站仪教学课程,为了达到实践教学的目的,可以让学生通过实际操作仪器去学习全站仪的操作流程及全站仪不同功能应用,但受制于教学场地的限制,大部分测量实践课的实习场地都选在学生所在校园内,而工程形式多样,分布广泛,无法前往真实工地展开实测,不利于学生将所学知识应用在实际工程测量中。
3.为此,现有技术提出构建一种全站仪仿真装置,以实现多场景的全站仪模拟教学,例如在授权公告号cn206339231u名为“一种测绘仪器仿真模型装置”的专利中,该装置包括全站仪仿真模型装置、手机安装装置、操作面板仿真装置、传感器信号采集装置和服务器,可以仿真不同场景下全站仪测量教学;但其仅仅是对仿真装置的结构进行了阐述,并没有给出全站仪模拟教学的具体手段,无法知道如何实现全站仪仿真测量。
技术实现要素:
4.本发明提供了一种用于全站仪的半实物模拟训练方法,用于实现真实的全站仪模拟教学过程。
5.本发明提供了一种用于全站仪的半实物模拟训练方法,该方法包括以下步骤:
6.1)建立含有已知坐标的三维虚拟场景,设定全站仪在虚拟场景中的第一位置坐标以及目标点的位置坐标,设定的目标点在三维虚拟场景中的位置坐标为全站仪在第一位置坐标处能够观测到的三维虚拟场景中的位置;
7.2)在全站仪目镜筒后侧的空间设置用于显示观测场景的精瞄视景屏幕,根据目标点位置显示对应目标点位置处三维虚拟场景的观测图像;
8.3)调节目镜调焦旋钮,通过检测模块检测目镜调焦旋转钮的转动量,根据检测到的旋钮转动量,调节精瞄视景屏幕中十字丝的清晰度;调节物镜调焦旋钮,通过检测模块检测物镜调焦旋钮的转动量,根据检测到的旋钮转动量以及全站仪到目标的已知距离,调节精瞄视景屏幕中图像的清晰度;
9.4)根据目标点位置坐标及全站仪第一位置坐标,反算全站仪所在位置处与目标点之间的角度、全站仪到目标点的距离,并将反算出的角度和距离进行显示,以实现对全站仪测角、测距的模拟训练。
10.本发明提供了一种用于全站仪的半实物模拟训练方法,建立含有已知坐标的三维虚拟场景,模拟实际测量过程中的不同场景;根据设置的精瞄视景屏幕模拟观测目标场景,通过检测模块检测到的目镜调焦旋钮和物镜调焦旋钮的转动量大小,控制屏幕中十字丝和画面的清晰度,模拟实际的精瞄过程,实现全站仪精瞄教学,并通过设定的全站仪位置坐标
和目标观测点位置坐标,反算全站仪所在位置处目标点之间的角度、全站仪到目标点的距离,并对模拟测量结果进行显示,实现全站仪的测角、测距教学。本发明通过模拟教学的方式提高学生对全站仪操作的熟练度,不受外界环境限制,可仿真不同场景,实现针对性教学。
11.进一步地,为了实现全站仪粗瞄过程的模拟教学,所述步骤3)操作之前需先对目标点进行粗瞄,通过旋转设置在全站仪提把上粗瞄视景屏幕进行粗瞄操作,所述粗瞄视景屏幕用于显示对应目标观测点在三维虚拟场景中的整体图像,以实现全站仪粗瞄训练。
12.进一步地,为了实现全站仪搬站测量的模拟教学,该方法还包括模拟全站仪搬站测量的操作,按照站点间通视关系,根据全站仪的第一位置坐标设定全站仪在三维虚拟场景中的第二位置坐标,根据设定的第二位置坐标,对精瞄视景屏幕和粗瞄视景屏幕中的图像进行角度切换,以实现全站仪搬站测量训练。
13.进一步地,为了实现盘左、盘右的模拟教学,所述粗瞄视景屏幕中装有陀螺仪,用于识别全站仪的盘左、盘右操作,根据识别出的全站仪盘左、盘右信息,切换粗瞄视景屏幕中显示的画面。
14.进一步地,为了保证盘左、盘右操作过程中,粗瞄视景屏幕中画面的真实性,在盘左、盘右测量过程中,根据水平角和/或竖直角的变化,控制粗瞄视景屏幕中的显示画面发生相应的水平和/或竖直方向上的变化。
15.进一步地,为了显示全站仪模拟测量的结果,所述步骤4)通过全站仪仿真屏幕对反算角度和距离进行显示,该全站仪仿真屏幕安装在全站仪屏幕上方。
16.进一步地,为了模拟全站仪屏幕的操作功能,所述全站仪仿真屏幕可以进行输入设置操作,包括坐标设置、参数设置、测量模式设置。
17.进一步地,为了实现全站仪对中教学,该方法还包括模拟全站仪激光对中的操作,通过安装在全站仪底部圆盘轴心处激光发射器实现全站仪激光对中,以实现全站仪对中训练。
18.进一步地,为了获取全站仪操作过程中的角度变化,所述的水平角和竖直角是根据全站仪自身的角度传感器检测得到的。
附图说明
19.图1是半实物全站仪教学系统的组成结构图;
20.图2(a)是现有全站仪结构图;
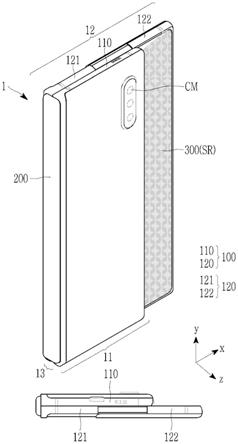
21.图2(b)是本发明半实物全站仪正面结构图;
22.图2(c)是本发明半实物全站仪侧面结构图;
23.图3(a)是精瞄视景盒外部结构图;
24.图3(b)是精瞄视景盒内部结构图;
25.图4(a)是精瞄视景屏幕安装内部结构图;
26.图4(b)是精瞄视景屏幕安装外部结构图;
27.图5(a)是粗瞄视景屏幕的正面安装结构图;
28.图5(b)是粗瞄视景屏幕的背面安装结构图;
29.图6是全站仪仿真屏幕的安装结构图;
30.图7是全站仪激光对中结构图;
31.图8是半实物全站仪软件系统;
32.图2-图6标记说明:1-全站仪机体、2-全站仪的同轴望远镜及激光测距模块、3-精瞄视景模块、4-粗瞄视景屏幕、5-全站仪仿真屏幕、6-粗瞄视景屏旋转轴、7-全站仪仿真屏幕旋转轴、8测钉、9-激光发射器、301-物镜调焦旋钮、302-目镜调焦旋钮、303-精瞄视景开关、3041-精瞄视景盒的充电接口、3042-电量显示灯,305-精瞄视景屏幕、306-侧滑盖、307-精瞄视景屏幕外置按键、308-视景手机充电接口、309-滑槽、310-磁吸锁、311-第一模拟量采集板、312-第一蓝牙模块、313-第一锂电池、314-电位器、315-菲涅尔透镜、316-空心传动轴、317-锥形筒、318-第二电位器、319-第二锂电池、320-第二蓝牙模块、321-第二模拟量采集板、401-横向手机支架、402-卡爪、403-手拧螺栓、4011-粗调支架、4012-微调旋钮、501-竖向手机支架、502-手拧旋钮、503-钣金支架、504-手拧螺栓。
具体实施方式
33.下面结合附图对本发明的具体实施方式作进一步地说明。
34.为了实现本发明全站仪半实物的模拟训练方法,本发明保留全站仪机体1,拆除了现有全站仪上的同轴望远镜及激光测距模块2,全新安装了一个精瞄视景盒、粗瞄视景屏幕、全站仪仿真屏幕、激光发射器。其中现有全站仪的结构如图2(a)所示,本发明方法所采用的半实物全站仪如图2(b)和图2(c)所示,在对本发明的方法进行介绍前,对该方法所采用的半实物全站仪进行介绍。
35.其中,精瞄视景盒的主要结构如图3(a)、图3(b)、图4(a)、图4(b)所示,图3(a)是精瞄视景盒外部结构图,包括物镜调焦旋钮301、目镜调焦旋钮302、视景盒的电源开关303、视景盒的充电接口3041及电量显示灯3042,以及精瞄视景屏幕305。精瞄视景屏幕305安置在精瞄视景盒的侧滑盖306内部,后盖沿滑槽309上下方向滑动,后盖与壳体之间设置有用于在后盖合上之后对后盖进行吸附的磁吸结构310。同时侧滑盖306上安装有精瞄视景屏幕的外置按键307、精瞄视景屏幕的充电接口308。侧滑盖306与模块主体通过滑槽309安装,当需要操作精瞄视景屏幕305时,向上推动,侧滑盖306会沿着滑槽309向上运动,从而露出精瞄视景屏幕305的触摸屏,方便操作。向下推动时,侧滑盖306上的磁吸锁310遇到精瞄视景盒主体上的磁吸锁310,二者吸合,从而使侧滑盖306固定住。
36.为了能够从目镜筒观测口看到精瞄视景屏幕305,如图3(b)所示,在整个中轴线上(图中虚线),机械传动轴316和锥形筒317均采用空心设计,使人的视线可以穿过目镜调焦旋钮302中心的小孔,没有任何阻碍的观看精瞄视景屏幕305上的视景。同时,为了消除该锥形视野内的反光等不良影响,空心传动轴316和锥形筒317内表面做磨砂黑色表面处理。以此,人眼通过目镜调焦旋钮302中心的小孔、空心传动轴316和锥形筒317看到的精瞄视景屏幕305的画面即可限制在以轴线为中心的圆形区域内,但是由于结构尺寸的限制,此时的视场角还是小于全站仪原机看到的望远镜内的视场角,为了进一步优化视景模拟的效果,在空心传动轴316和锥形筒317中间增加一块菲涅尔透镜315,该透镜表面有许多同心圆凹槽,既能像普通透镜一样放大图像,又能保证放大后的图像各处亮度保持一致。
37.物镜调焦旋钮301和目镜调焦旋钮302连接有旋钮转动量检测模块,旋钮转动量的检测模块包括第一电位器314和第二电位器318,第一电位器314与目镜筒之间通过第一齿
轮传动结构传动配合,第二电位器与目镜筒之间通过第二齿轮传动结构传动配合。第一齿轮传动结构包括止转安装在目镜筒外部的第一输入齿轮以及止转安装在第一转轴外部的第一输出齿轮,第一输入齿轮和第一输出齿轮啮合;第二齿轮传动结构包括止转安装在传动筒外部的第二输入齿轮以及止转安装在第二转轴外部的第二输出齿轮,第二输入齿轮和第二输出齿轮啮合;第一输入齿轮位于第二输入齿轮的后侧。此外,还安装有第一模拟量采集板311,第一模拟量采集板311还连接有第一蓝牙模块312,第一模拟量采集板311和第一蓝牙模块312均由第一锂电池313供电,还安装有第二模拟量采集板321,第二模拟量采集板311还连接有第二蓝牙模块320,第二模拟量采集板321和第二蓝牙模块320均由第二锂电池319供电,第一模拟量采集板311将采集到的目镜旋钮转动量通过第一蓝牙模块312发送给pc训练终端;第二模拟量采集板321将采集到的物镜旋钮转动量通过第二蓝牙模块320发送给pc训练终端。其中,pc训练终端根据检测到的目镜调焦旋钮302的转动量,调节精瞄视景屏幕305中十字丝的清晰度,根据检测到的物镜调焦旋钮301的转动量,调节精瞄视景屏幕305中图像的清晰度。
38.其中,如图5(a)和5(b)所示,粗瞄视景屏幕4旋转设置在全站仪提把上,通过安装在全站仪提把上的第一支架,第一支架包括用于固定在提把上的第一固定部402以及用于夹持粗瞄视景屏幕4的第一夹持部401,第一夹持部401通过轴线沿左右方向延伸的铰接轴与第一固定部402铰接相连,以使第一夹持部可相对于第一固定部绕轴6进行180
°
旋转,保证设备在盘左盘右操作时都可以使用。在安装时,旋转支架上的粗调旋钮4011打开支架,将粗瞄视景屏幕4放入,先旋转粗调支架4011,大致拧紧支架后,可以再旋转微调旋钮4012进行微调;粗瞄视景屏幕4安装完成后,拧掉卡爪402上的手拧螺栓403,将卡爪402卡在全站仪顶部的提把上,然后拧紧手拧螺栓403,使其固定在提把上。
39.其中,如图2(b)、图2(c)和图6所示,全站仪仿真屏幕5安装在现有全站仪屏幕上方,在安装全站仪仿真屏幕即手机时,沿着图6中箭头所示方向向下拉开手机支架501,将全站仪仿真屏幕5放入,全站仪仿真屏幕5即可由支架内的弹簧固定锁紧。全站仪仿真屏幕5安装完成后,拧松钣金支架503上的手拧螺栓504,将钣金支架503卡在全站仪两侧的校准屏幕框架上,然后拧紧手拧螺栓504,使其牢牢固定在现有全站仪的屏幕框架上。全站仪仿真屏幕5可以绕着轴7作旋转运动,当需要操作现有全站仪屏幕时,只需将全站仪仿真屏幕5向上翻转,即可观看原机的屏幕并操作旁边的按键。旋转手拧旋钮502,可以调节轴7的旋转阻尼,通过调节阻尼,可以使支架克服全站仪仿真屏幕5重力,停留在任意角度。
40.其中,如图7所示,激光发射器9安装在全站仪底部的圆盘轴心处了,该激光发射器9用于在全站仪对中整平时,观测激光发射器9打在地面上的红点,使红点与地面事先设置好的测钉8的十字中心重合。激光发射器9自带电源和开关,通过螺纹安装在全站仪底部。
41.本发明根据上述的半实物全站仪进行全站仪半实物模拟训练,具体步骤如下:
42.1、建立三维虚拟场景、设定全站仪、目标点坐标
43.本发明首先需要建立包含已知坐标的三维虚拟场景。针对实际测量过程中的不同环境,构建不同三维虚拟场景,有助于实现不同科目的训练,更有助于学生将所学知识应用在不同的实际测量过程中。虚拟场景构建可以通过三维扫描的方式,来获取真实场景中的三维坐标点,并对扫描结果进行建模,生成包含已知坐标的三维虚拟场景。在本发明中,建立好的三维虚拟场景存储在pc训练终端中。如图1所示,pc训练终端还包括通讯模块,在本
实施例中,通讯模块包括蓝牙接收装置、232接口数据接收装置、无线数据发射装置;通过蓝牙接收装置接收可以表征目镜调焦旋钮和物镜调焦旋钮的信号,通过232接口数据接收装置接收全站仪获取的水平角、竖直角,通过无线数据发射装置用来向视景屏幕发送视景位置信息。pc训练终端还包括有现有全站仪用于坐标测量、坐标正反算、悬高测量、后方交会、高程传递、相对直线坐标、坐标放样等的应用程序。
44.进行模拟测量时,在建立好的三维虚拟场景中,设定全站仪的第一位置坐标和目标点的位置坐标,设定的目标点在三维虚拟场景中的位置坐标为全站仪在第一位置坐标处能够观测到的三维虚拟场景中的位置;即保证在三维虚拟场景中架设的全站仪能够实现与目标点之间的通视。
45.2、目标点粗瞄
46.在实际全站仪测量过程中,需要先对目标点进行粗瞄,目的是为了先确定目标点的粗略方向,方便后续精瞄过程中操作人员可以快速通过望远镜筒的目镜观测口找到目标点;在原有的全站仪中,同轴望远镜筒的上、下表面均装有一个黑色的正三角,操作人员在测量过程中可通过黑色的正三角找到目标的粗略方向,实现粗略瞄准。为了实现全站仪粗瞄的模拟教学,如图2(b)所示,本发明通过旋转设置在全站仪提把上粗瞄视景屏幕4进行粗瞄操作,该粗瞄视景屏幕4可以显示对应目标点在三维虚拟场景中的整体图像。同时,为了模拟全站仪盘左、盘右操作,本发明在粗瞄视景屏幕4中装有陀螺仪,根据识别出的全站仪盘左、盘右信息,切换粗瞄视景屏幕4中显示的画面,保证粗瞄视景屏幕4中画面的真实性,当在盘左、盘右测量过程中,左右旋转全站仪机体的底盘和上下旋转目镜筒,根据全站仪自身的角度检测器可以检测出全站仪的水平角和竖直角的变化,将检测出的水平角和竖直角的变化通过全站仪原机的232接口发送给pc训练终端,pc训练终端根据接收到的水平角和/或竖直角的变化,通过无线传输的方式控制粗瞄视景屏幕4中的显示画面发生相应的水平和/或竖直方向上的变化。同时在盘左、盘右切换中,粗瞄视景屏幕4可以绕轴6进行180
°
旋转,保证在盘左、盘右时都可以实现目标粗瞄。
47.3、目标点精瞄
48.在实际的全站仪测量过程中,需要先通过调节全站仪的目镜调焦旋钮使望远镜筒内的十字丝变清晰度,再通过调节全站仪的物镜调旋钮使人观测的目标物变清晰,此后再将十字丝中心对准目标物,实现目标精瞄。为了实现全站仪精瞄的模拟教学,本发明先旋转如图3(a)中的目镜调焦旋钮302,通过第一电位器314将旋钮的转动量转换为对应电信号,再经过第一模拟量采集板311将采集到的电信号通过第一蓝牙模块312传输给pc训练终端;pc训练终端通过无线发射装置向精瞄视景屏幕305发送调节信息,使精瞄视景屏幕305上十字丝变清晰;再旋转如图3(a)中的物镜调焦旋钮301,通过第二电位器318将旋钮的转动量转换为对应电信号,再经过第二模拟量采集板321将采集到的电信号通过第二蓝牙模块320传输给pc训练终端,pc训练终端通过无线发射装置向精瞄视景屏幕305发送调节信息,使精瞄视景屏幕305上的图像变清晰。当精瞄视景屏幕305中十字丝和图像均清晰后,将十字丝中心瞄准目标点位置,以模拟全站仪的精瞄过程。
49.在实际测量中,仅在一个站点进行测量,肯定无法满足对实际区域的测量需求,因此,需要在目标区域不同方向架设站点进行观测,为了满足测量需求,还需要在搬站时做到站点之间通视。为了模拟全站仪的搬站测量操作,本发明按照站点间通视关系,根据全站仪
的第一位置坐标设定全站仪在三维虚拟场景中的第二位置坐标,根据设定的第二位置坐标,对精瞄视景屏幕和粗瞄视景屏幕中的图像进行角度切换,以实现全站仪搬站测量模拟训练。
50.4、测量结果显示
51.本发明根据目标点位置坐标及全站仪第一位置坐标,反算全站仪所在位置处与目标点之间的角度、全站仪到目标点的距离,并将反算出的角度和距离进行显示,以实现对全站仪测角、测距的模拟训练。
52.其中,本发明采用全站仪仿真屏幕5对反算角度和距离进行显示,该全站仪仿真屏幕5安装在全站仪屏幕上方。该全站仪仿真屏幕还可以显示竖盘读数(竖直角)、水平度盘读数(水平角),目标点坐标、全站仪与目标点的斜距、盘左、盘右等信息;该全站仪仿真屏幕还可以进行输入设置操作,包括坐标设置、参数设置、测量模式设置;例如,可以输入棱镜改正值、大气改正值、控制点坐标等,还可以选择测量模式,包括角度测量模式、距离测量模式、坐标测量模式。该全站仪仿真屏幕也可安装现有全站仪用于坐标测量、坐标正反算、悬高测量、后方交会、高程传递、相对直线坐标、坐标放样等的应用程序。
53.通过上述方法即可实现全站仪的半实物模拟训练,下面以模拟全站仪测量角度为例进行说明。假设全站仪在三维虚拟场景中的位置为o点,目标点为a、b两点,设定的全站仪在三维虚拟场景中的第一位置坐标(o点的坐标)和目标点的位置坐标(a、b两点坐标)。先通过左、右旋转全站仪底盘,使粗瞄视景屏中显示的图像在盘左和盘右时均包含有目标点a点,模拟全站仪粗瞄过程;人眼通过目镜筒观测口观测,先旋转目镜调焦旋钮,pc训练终端根据第一电位器检测到的代表目镜调焦旋钮旋转量的电信号,控制精瞄视景屏幕中的十字丝变清晰,再旋转物镜调焦旋钮,pc训练终端根据第二电位器检测到的代表物镜调焦旋钮旋转量的电信号,控制精瞄视景屏幕中的图像变清晰,通过左右旋转全站仪底盘和上下转动目镜筒,pc训练终端根据全站仪机体水平旋转角度和竖直角度计算十字丝和目标点的位置关系,并将该位置关系通过精瞄视景屏幕进行显示,直至使十字丝中心与目标点a重合,在全站仪仿真屏幕将水平度盘读数置零;再通过上述操作使十字丝中心与目标点b重合;pc训练终端根据全站仪位置坐标和a、b两点位置坐标,反算aob的角度关系,并通过通讯模块发送至全站仪仿真屏幕上。在此过程中,分别通过盘左、盘右进行操作,来模拟真实测量过程中盘左、盘右角度测量。以此可以实现全站仪在角度测量中的模拟教学。
54.为了更好地实现全站仪的半实物模拟教学,本发明还设置有软件系统,如图8所示,该软件系统由场景定位分系统、安卓端视景显示分系统和全站仪屏幕仿真分系统组成。其中,场景定位分系统由场景漫游模块、背包模块、定位数据发送模块组成,该分系统在pc训练终端中进行部署;在虚拟场景中,使用人员可通过该系统在不同虚拟场景中漫游,选择测量点、规划测量路线等操作。并能够从虚拟背包中拿取全站仪、测钉、三脚架等测量物品进行放置。通过场景定位架设全站仪位置,点击对应按钮将定位数据发送至视景显示模块中,而后操作半实物全站仪进行测量,虚拟场景中的全站仪将1:1还原对半实物全站仪操作内容,并对操作内容记录。
55.由于实际测量过程中需要进行搬站测量,本发明通过移动虚拟场景中的虚拟全站仪,在pc训练终端中进行场景切换,模拟实际中的全站仪搬站过程。安卓端视景显示分系统由角度接收模块、定位数据接收模块、视景校准展示模块组成,该分系统在安卓平板(或手
机)进行部署;在虚拟场景中架设全站仪后,点击对应按钮将定位数据发送至安卓视景显示分系统。后通过操作半实物全站仪,将当前半实物全站仪角度发送至安卓端视景显示分系统,通过视景校准展示模块对角度及定位数据处理后,展示当前视景显示三维场景内容。全站仪仿真屏幕分系统由补偿值接收模块、测量角度数据接收模块、仿真屏幕模块组成,该分系统在仿真屏幕设备中部署;能够仿真完成全站仪校准、测距、测角等操作,通过接收半实物全站仪发送x轴、y轴补偿值及角度数据,展示当前仪器对应读数信息。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。