1.本技术涉及雷达技术领域,特别涉及一种激光雷达装置。
背景技术:
2.激光雷达通过向目标区域出射激光光束,并接收由目标区域反射回来的激光回波光束,根据激光光束的飞行时间来获取待测空间的三维信息。由于激光雷达具有解析度高,测量精度高,抗干扰能力强等优点,其被广泛应用在无人驾驶等领域,成为这些领域的必不可缺的传感装置。
3.激光雷达主要由激光发射端、回波接收端以及光学系统构成,其中,光学系统是激光雷达的“眼睛”,它的性能优劣直接影响了激光的测量精度以及探测能力。因此,如何减小光线经过光学系统时各透镜产生的球差、像散、畸变等像差影响,是现有技术中激光雷达所要解决的主要问题。
技术实现要素:
4.本技术提供了一种激光雷达装置,通过对第一透镜、第二透镜、第三透镜以及第四透镜的光焦度进行合理设计,可减小光线经过光学系统时各透镜产生的球差、像散、畸变等像差,有利于提升光学系统的准直和会聚光束的能力。
5.为解决上述问题,本技术提供的技术方案为:一种激光雷达装置,包括发射机构及接收机构。
6.所述发射机构包括光发射组件、第一反射镜组及光发射透镜组,所述光发射组件用于发射激光光束,所述第一反射镜组用于向所述光发射透镜组反射所述激光光束,所述光发射透镜组用于准直所述激光光束。
7.所述接收机构包括光接收组件、第二反射镜组及光接收透镜组,所述光接收透镜组用于会聚回波光束,所述第二反射镜组用于向所述光接收组件反射所述回波光束,所述光接收组件用于接收所述回波光束。
8.所述光发射透镜组及所述光接收透镜组的透镜组成相同,从物侧至像侧依次包括具有正光焦度的第一透镜、具有正光焦度的第二透镜、具有负光焦度的第三透镜以及具有正光焦度的第四透镜。
9.本技术中的激光雷达装置的工作过程为:光发射组件发出多条激光光束,依次经过第一反射镜组入射到光发射透镜组上,经光发射透镜组准直后射向障碍物上,激光光束在障碍物上被反射形成回波光束,回波光束经过光接收透镜组会聚,之后经过第二反射镜组的反射到光接收组件,然后通过分析设备处理光接收组件传送来的电信号,从而探测障碍物。
10.本技术中的激光雷达装置,通过对第一透镜、第二透镜、第三透镜及第四透镜的光焦度进行合理设计,有利于减小光线经过光学系统时各透镜产生的球差、像散、畸变等像差影响,有利于提升光学系统的准直和会聚光束的能力。
11.此外,在纯透镜组成的激光雷达的光学系统中,不具有反射镜组,激光光束或者回波光束沿着透镜组的物侧至像侧的方向行径,需要较大的轴向空间以满足激光光路的调整要求,不利于紧凑型雷达结构的设计。在本技术中的激光雷达装置,由反射镜组和透镜组构成了折返式光学系统,反射镜组能够折叠激光光路,从而大幅缩短轴向空间,使激光光路在较小的空间内里完成准直和会聚,能够缩短光学系统的光学总长,从而让整个雷达结构更加紧凑,体积和重量进一步得到减小。
12.在一种可能的设计方式中,所述第一透镜为弯月凸透镜,所述第二透镜为柱面镜,所述第三透镜为双凹透镜,所述第四透镜为双凸透镜。
13.在一种可能的设计方式中,所述第一透镜、所述第二透镜、所述第三透镜及所述第四透镜满足下列关系式:
14.1.7《n1《1.8;1.5《n2《1.6;1.6《n3《1.7;1.7《n4《1.8;
15.其中,n1、n2、n3、n4分别为所述第一透镜、所述第二透镜、所述第三透镜、所述第四透镜在波长为550nm时的折射率。
16.在一种可能的设计方式中,所述光接收组件包括接收电路板及探测器,多个所述探测器呈阵列状设置于所述接收电路板上;
17.所述光发射组件包括发射转接板及激光器,多个所述激光器按照多个所述探测器的阵列状,一一对应地设置于所述发射转接板上。
18.在一种可能的设计方式中,激光雷达装置还包括:
19.转动机构,用于带动所述发射机构及所述接收机构旋转。
20.在一种可能的设计方式中,所述转动机构包括中心轴、轴承、承载座及电机组件,所述承载座用于承载所述发射机构和所述接收机构,所述中心轴与所述承载座之间设有所述轴承,所述电机组件用于带动所述承载座围绕着所述中心轴旋转。
21.在一种可能的设计方式中,所述承载座上与所述光发射透镜组和所述光接收透镜组的相对位置设有配重件,以使所述承载座旋转时稳定。
22.在一种可能的设计方式中,所述中心轴设有引线槽,用于穿设为所述激光雷达装置的主控芯片供电的导线。
23.在一种可能的设计方式中,激光雷达装置还包括:
24.导热件,用于将所述激光雷达装置的主控芯片的热量传导至外部。
25.在一种可能的设计方式中,所述第一反射镜组及所述第二反射镜组的反射镜结构相同,均包括两个与水平方向具有夹角的反射镜。
附图说明
26.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
27.图1是激光雷达装置的工作原理示意图;
28.图2是本技术实施例提供的激光雷达装置的一例的示意图;
29.图3是本技术实施例提供的激光雷达装置的工作原理示意图;
30.图4是本技术实施例提供的发射机构和接收机构的一例的示意图;
31.图5是图4另一视角的示意图;
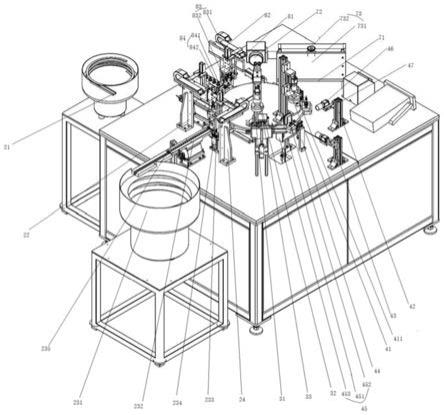
32.图6是本技术实施例提供的激光雷达装置的另一例的示意图;
33.图7是本技术实施例提供的激光雷达装置的一例的剖视图。
34.附图标记:11、光发射组件;111、发射转接板;112、激光器;12、第一反射镜组;13、光发射透镜组;131、第一透镜;132、第二透镜;133、第三透镜;134、第四透镜;21、光接收组件;211、接收电路板;212、探测器;22、第二反射镜组;23、光接收透镜组;30、转动机构;31、中心轴;311、引线槽;32、轴承;33、承载座;331、配重件;34、电机组件;40、导热件;50、主控芯片;100、雷达装置。
具体实施方式
35.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
36.在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
37.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
38.在本技术的描述中,需要理解的是,术语“内”、“外”、“上”、“底”、“前”、“后”等指示的方位或者位置关系(若有的话)为基于附图1所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或者暗示所指的装置或者元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
39.还需说明的是,本技术实施例中以同一附图标记表示同一组成部分或同一零部件,对于本技术实施例中相同的零部件,图中可能仅以其中一个零件或部件为例标注了附图标记,应理解的是,对于其他相同的零件或部件,附图标记同样适用。
40.激光雷达可以通过内部激光器向某个方向发射激光光束,激光光束照射到光路上的某物体后,经过漫反射,会有部分激光光束反射回激光雷达,即回波光束。此时,激光雷达可以通过探测器探测到物体反射回的回波光束。然后,激光雷达将发射的激光光束和反射回的回波光束的相关信息,提供给计算机设备,计算机设备可以基于这些信息,对物体的状态进行分析,得到物体的距离、方位、高度、速度、姿态、形状等相关信息,并对物体的相关信息进行显示,或基于物体的相关信息进行智能控制处理。
41.激光雷达的应用领域非常广泛。除了运用在军事领域之外,目前还被广泛应用于生活领域,包括但不限于:智能驾驶车辆、智能驾驶飞机、3d打印、虚拟现实(virtualreality,vr)、增强现实(augmented reality,ar)、服务机器人等领域。
42.图1是激光雷达装置的工作原理示意图。如图1所示,以智能驾驶车辆为例,在智能驾驶车辆中设置激光雷达,激光雷达可通过快速且重复地发射激光光束来扫描周围环境,以获取反映周围环境中的一个或多个对象的形貌、位置和运动的点云数据,将各对象的位置信息和激光光束的角度信息相结合,生成包括所扫描的周围环境的各对象的三维地图,利用该三维地图可指导无人车的智能驾驶。
43.光学系统是激光雷达的“眼睛”,它的性能优劣直接影响了激光的测量精度以及探测能力。因此,如何减小光线经过光学系统时各透镜产生的球差、像散、畸变等像差影响,是现有技术中激光雷达所要解决的主要问题。
44.为了解决上述问题,本技术实施例提供了一种激光雷达装置,通过对第一透镜、第二透镜、第三透镜以及第四透镜的光焦度进行合理设计,可减小光线经过光学系统时各透镜产生的球差、像散、畸变等像差,有利于提升光学系统的准直和会聚光束的能力。
45.为方便理解,下面先对本技术所涉及的技术术语进行解释和描述。
46.焦距(focal length),也称为焦长,是光学系统中衡量光的聚集或发散的度量方式,指无限远的景物通过透镜或透镜组在焦平面结成清晰影像时,透镜或透镜组的光学中心至焦平面的垂直距离。从实用的角度可以理解为镜头中心至胶片平面的距离。对于定焦镜头来说,其光学中心的位置是固定不变的;对于变焦镜头来说,镜头的光学中心的变化带来镜头焦距的变化。
47.光焦度(focal power):等于像方光束会聚度与物方光束会聚度之差,它表征光学系统偏折光线的能力。光焦度常用字母φ表示,折射球面光焦度φ=(n'-n)/r=n'/f'=-n/f,其中n'为像方折射率,n为物方折射率,r为球面半径,f'为像焦距,f为物焦距。一般光焦度表示为像方焦距的倒数(近似认为空气的折射率为1)。上述光焦度等式对任何光学系统都是普适的(无傍轴之分)。
48.光焦度表征光学系统对入射平行光束的屈折本领。φ的数值越大,平行光束折得越厉害;φ》0时,屈折是会聚性的;φ《0时,屈折是发散性的。φ=0时,对应于,即为平面折射。这时,沿轴平行光束经折射后仍是沿轴平行光束,不出现屈折现象。
49.光学总长(total track length,ttl),指从镜筒头部至成像面的总长度,是形成相机高度的主要因素。
50.视场角(field of view,fov),在光学仪器中,以光学仪器的镜头为顶点,以被测目标的物像可通过镜头的最大范围的两条边缘构成的夹角,称为视场角。视场角的大小决定了光学仪器的视野范围,视场角越大,视野就越大,光学倍率就越小。
51.光轴,是一条垂直穿过理想透镜中心的光线。与光轴平行的光线射入凸透镜时,理想的凸镜应是所有的光线会聚在透镜后的一点,这个会聚所有光线的一点,即为焦点。
52.像差(aberration),是指实际光学系统中,由非近轴光线追迹所得的结果和近轴光线追迹所得的结果不一致,与高斯光学(一级近似理论或近轴光线)的理想状况的偏差。像差主要分为球差、彗差、场曲、像散、畸变、色差以及波像差。
53.畸变(distortion),也称为失真,光学系统对物体所成的像相对于物体本身而言
的失真程度。畸变是由于光阑球差的影响,不同视场的主光线通过光学系统后与高斯像面的交点高度不等于理想像高,两者之差就是畸变。因此畸变只改变轴外物点在理想面上的成像位置,使像的形状产生失真,但不影响像的清晰度。
54.为描述方便,定义透镜组左侧为景物侧(以下也可称为物侧),镜片的朝向物侧的表面可以称为物侧面,物侧面也可以理解为镜片靠近物侧的表面,透镜组右侧为图像侧(以下也可称为像侧),镜片的朝向像侧的表面可以称为像侧面,像侧面也可以理解为镜片靠近像侧的表面。
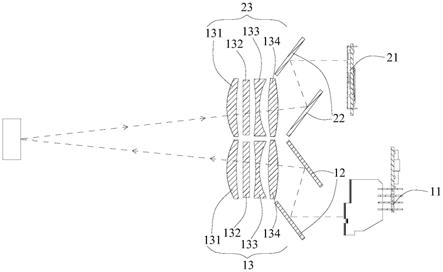
55.图2是本技术实施例提供的激光雷达装置100的一例的示意图。图3是本技术实施例提供的激光雷达装置100的工作原理示意图。
56.如图2、图3所示,本技术实施例提供了一种激光雷达装置100,包括发射机构及接收机构。
57.发射机构包括光发射组件11、第一反射镜组12及光发射透镜组13,光发射组件11用于发射激光光束,第一反射镜组12用于向光发射透镜组13反射激光光束,光发射透镜组13用于准直激光光束。
58.接收机构包括光接收组件21、第二反射镜组22及光接收透镜组23,光接收透镜组23用于会聚回波光束,第二反射镜组22用于向光接收组件21反射回波光束,光接收组件21用于接收回波光束。
59.光发射透镜组13及光接收透镜组23的镜片组成相同,从物侧至像侧依次包括具有正光焦度的第一透镜131、具有正光焦度的第二透镜132、具有负光焦度的第三透镜133以及具有正光焦度的第四透镜134。
60.本技术实施例中的激光雷达装置100的工作过程为:光发射组件11发出多条激光光束,依次经过第一反射镜组12射向光发射透镜组13,经光发射透镜组13准直后射向障碍物,激光光束在障碍物上被反射形成回波光束,回波光束经过光接收透镜组23会聚,之后经过第二反射镜组22的反射到光接收组件21上,然后通过分析设备处理光接收组件21传送来的电信号,从而探测障碍物。
61.本技术实施例中的激光雷达装置100,通过对第一透镜131、第二透镜132、第三透镜133及第四透镜134的光焦度进行合理设计,可减小光线经过光学系统时各透镜产生的球差、像散、畸变等像差,有利于提升光学系统准直和会聚光束的能力。
62.此外,在纯透镜组成的激光雷达的光学系统中,不具有反射镜组,激光光束或者回波光束沿着透镜组的物侧至像侧的方向行径,需要较大的轴向空间以满足激光光路的调整要求,不利于紧凑型雷达结构的设计。在本技术实施例中的激光雷达装置100,由反射镜组和透镜组构成了折返式光学系统,反射镜组能够折叠激光光路,从而大幅缩短轴向空间,使激光光路在较小的空间内里完成准直和会聚,能够缩短光学系统的光学总长,从而让整个雷达结构更加紧凑,体积和重量进一步得到减小。
63.可选地,第一透镜131可以为塑料材质或者玻璃材质,还可以为其他能够满足第一透镜131性能要求的材料,如:将无机金属氧化物、无机金属硫化物等的细颗粒掺混到树脂基体中的复合材料。第一透镜131具有正光焦度,第一透镜131的物侧面为凸面,第一透镜131的像侧面为凹面,第一透镜131的物侧面和像侧面既可以为球面,也可以为非球面。
64.可选地,第二透镜132可以为塑料材质或者玻璃材质,还可以为其他能够满足第二
透镜132性能要求的材料,如:将无机金属氧化物、无机金属硫化物等的细颗粒掺混到树脂基体中的复合材料。第二透镜132具有正光焦度,第二透镜132的物侧面为球柱面,第二透镜132的像侧面为平面。
65.可选地,第三透镜133可以为塑料材质或者玻璃材质,还可以为其他能够满足第三透镜133性能要求的材料,如:将无机金属氧化物、无机金属硫化物等的细颗粒掺混到树脂基体中的复合材料。第三透镜133具有负光焦度,第三透镜133的物侧面为凹面,第三透镜133的像侧面为凹面,第三透镜133的物侧面和像侧面既可以为球面,也可以为非球面。
66.可选地,第四透镜134可以为塑料材质或者玻璃材质,还可以为其他能够满足第四透镜134性能要求的材料,如:将无机金属氧化物、无机金属硫化物等的细颗粒掺混到树脂基体中的复合材料。第四透镜134具有正光焦度,第四透镜134的物侧面为凸面,第四透镜134的像侧面为凸面,第四透镜134的物侧面和像侧面既可以为球面,也可以为非球面。
67.如图3所示,在一种实施例中,第一透镜131为弯月凸透镜,第二透镜132为柱面镜,第三透镜133为双凹透镜,第四透镜134为双凸透镜。
68.本实施例中,具体限定了每个透镜的面型结构。
69.第一透镜131为弯月凸透镜,由两个曲率半径相近的曲面构成。弯月凸透镜主要是用于最小化球差,与另外一透镜结合使用时,弯月凸透镜可以减小焦距,在不引入明显球面像差的情况的同时增加系统数值孔径。当用于会聚平行光时,为了使球差最小化透镜的凸面应朝向光源发射的方向。
70.第二透镜132为柱面镜。柱面镜是球柱状透镜,主要用来校正滤光器件产生的影响,保证光斑质量。
71.第三透镜133为双凹透镜,双凹透镜是由两个凹面加工而成,形成负光焦度。双凹透镜在系统中用于光束准直、增加焦距或扩大图像。
72.第四透镜134为双凸透镜,双凸透镜主要作用有聚焦发散光束、会聚光束等用途,可将准直光束聚焦或者将点光源准直。
73.在一种实施例中,第一透镜131、第二透镜132、第三透镜133及第四透镜134满足下列关系式:
74.1.7《n1《1.8;1.5《n2《1.6;1.6《n3《1.7;1.7《n4《1.8;
75.其中,n1、n2、n3、n4分别为第一透镜131、第二透镜132、第三透镜133、第四透镜134在波长为550nm的折射率。
76.本实施例中,对于第一透镜131、第二透镜132、第三透镜133及第四透镜134的折射率给出了一定范围,使得第一透镜131、第二透镜132、第三透镜133及第四透镜134的折射率的选择范围较多,容易得到较薄且像差矫正能力强的透镜组,同时也有利于减小光学系统的光学总长,使激光雷达的得以小型化设计。
77.本实施例中,最终形成的光学系统的视场角为30
°
,有效焦efl为80mm,后焦距bfl为61.2mm。
78.图4是本技术实施例提供的发射机构和接收机构的一例的示意图。图5是图4另一视角的示意图。
79.如图4、图5所示,在一种实施例中,光接收组件21包括接收电路板211及探测器212,多个探测器212呈阵列状设置于接收电路板211上。光发射组件11包括发射转接板111
及激光器112,多个激光器112按照多个探测器212的阵列状,一一对应地设置于发射转接板111上。
80.在激光雷达的装调过程中,为了实现回波光束的最大程度地接收,需要确保多个激光器112和多个探测器212一一对准,从而提高激光雷达的测远和准确度。在现有技术中,当调整多个激光器112和多个探测器212相对应,调试一路发射要对应调试一路接收,以16个激光器112对应16个探测器212为例,需要进行32次调试。
81.反观本实施例中,多个探测器212预先集成到一个接收电路板211中,将接收电路板211确定好安装位置,之后不再对探测器212进行调整、移动,只对应调整激光器112的位置,即多个激光器112按照多个探测器212的阵列状,一一对应地设置于发射转接板111上。
82.可选地,激光器112通过插针预固定在发射转接板111上之后,通过不断地微调使之与探测器212位置对应,最后通过点胶固定。
83.具体地,激光器112包括激光器本体以及电路板,激光器本体设置于电路板上,微调过程中,通过调整电路板的角度、位置,从而带动激光器本体进行调整,最终使激光器本体与探测器212进行对位。
84.本实施例中的激光雷达,通过将多个探测器212集成到一个接收电路板211中,之后不再对探测器212进行调整、移动,由此在装调过程中避免了调试一路发射要对应调试一路接收,可降低发射和接收的对应调试次数,进而减少了调试工序的操作步骤,大大提高生产加工效率。
85.可选地,激光器112可以是半导体激光器112。其中,半导体激光器112又称激光二极管,是用半导体材料作为工作物质的激光器112。由于物质结构上的差异,不同种类产生激光的具体过程比较特殊。常用工作物质有砷化镓(gaas)、硫化镉(cds)、磷化铟(inp)、硫化锌(zns)等。激励方式有电注入、电子束激励和光泵浦三种形式。半导体激光器112件,可分为同质结、单异质结、双异质结等几种。同质结激光器112和单异质结激光器112在室温时多为脉冲器件,而双异质结激光器112室温时可实现连续工作。
86.可选地,探测器212可以是雪崩光电二极管(avalanche photo diode,apd)。其中,雪崩光电二极管指的是在激光通信中使用的光敏元件。在以硅或锗为材料制成的光电二极管的p-n结上加上反向偏压后,射入的光被p-n结吸收后会形成光电流。加大反向偏压会产生“雪崩”(即光电流成倍地激增)的现象,因此这种二极管被称为“雪崩光电二极管”。
87.可选地,本实施例中的激光雷达为16线,角度分辨率为2
°
,垂直方向角度为30
°
。
88.图7是本技术实施例提供的激光雷达装置100的一例的剖视图。
89.如图7所示,在一种实施例中,激光雷达装置100还包括:
90.转动机构30,用于带动发射机构及接收机构旋转。
91.可选地,转动机构30可以采用无轴外转子电机作为动力源。传统的电动机是定子在外,转子旋转产生动力。外转子电机是与之相反的结构,定子在电动机的中间,转子在外。其具有效率高、噪声低、重量轻、结构紧凑等特点,作为激光雷达装置100的转动机构30时,可进一步降低激光雷达装置100的外形尺寸,使其满足小型化的设计要求。
92.如图7所示,在一种实施例中,转动机构30的具体结构为:包括中心轴31、轴承32、承载座33及电机组件34,承载座33用于承载发射机构和接收机构,中心轴31与承载座33之间设有轴承32,电机组件34用于带动承载座33围绕着中心轴31旋转。
93.如前所述,为了使激光雷达装置100的结构小型化,尽可能降低传动组件的数量,因此将转动机构30采用无轴外转子电机作为动力源,即本技术实施例中,电机组件34为无轴外转子电机。
94.具体地,无轴外转子电机的定子套在中心轴31上,转子套在承载座33上。
95.其中,承载座33上设有用于容纳和安装发射机构和接收机构的腔室,例如,设有用来安装发射转接板111、激光器112、接收电路板211及探测器212的安装部,设有用来安装第一透镜131、第二透镜132、第三透镜133及第四透镜134的安装槽,设有用于安装第一反射镜组12和第二反射镜组22的安装座。
96.中心轴31的作用是为承载座33提供支撑力,具体地,中心轴31与承载座33之间设有轴承32,轴承32的内圈套设在中心轴31的外部,轴承32的外圈与承载座33相连,电机组件34的转子与承载座33相连,电机组件34带动承载座33围绕着中心轴31旋转。
97.可选地,中心轴31可以采用阶梯轴,具有多处轴肩用来定位安装轴承32、承载座33等部件。多处直径不同的轴肩可以限制中心轴31上的部件延轴线方向运动,从而能够防止安装的轴承32、承载座33等部件在工作中产生滑移,并能减小轴承32、承载座33在工作中产生的轴向压力对其他部件造成的影响。
98.可选地,轴承32具有多个且尺寸不一,沿中心轴31的轴向而分布。具体布置方式以及尺寸参数可根据各部件的尺寸及预留安装空间而定。
99.图6是本技术实施例提供的激光雷达装置100的另一例的示意图。
100.如图6所示,在一种实施例中,承载座33上与光发射透镜组13和光接收透镜组23的相对位置设有配重件331,以使承载座33旋转时稳定。
101.本实施例中,配重件331是为了弥补激光雷达尾部的重量,以平衡旋转时的离心力,使承载座33旋转时更加稳定,避免出现晃动。
102.可选地,配重件331可以为l形或者弧形,以适应激光雷达的外壳内侧壁的形状。
103.可选地,配重件331可以开设孔洞结构,从而对配重件331的重量进行微调,进而能够更加精确地补偿承载座33旋转时的离心力,从而使承载座33在旋转时更加稳定,避免出现晃动。
104.具体地,配重件331的孔洞结构可以是预开设好的,呈阵列状而均匀分布,在对其重量微调时,可以在孔洞结构内部增加配重材料而进行微调;亦或者,配重件331并不预开设孔洞结构,可以在微调现场开孔而调节。
105.可选地,配重件331的孔洞结构可以是螺孔,在填充配重材料时可以通过旋拧螺栓的方式实现,实施起来更加快捷。
106.可选地,配重件331还可以是翅片结构,由此不仅能够实现配重作用,同时由于其表面积较大,能够提高与空气的换热面积,进而使配重件331还具有散热作用。
107.具体地,呈翅片结构的配重件331应更加靠近激光雷达的外壳内侧壁,使热量能够更好地转移出去。
108.如图7所示,在一种实施例中,中心轴31设有引线槽311,引线槽311用于穿设为激光雷达装置100的主控芯片50供电的导线。
109.本实施例中,通过在中心轴31内开设引线槽311,引线槽311内穿设导线,可以为顶部的主控芯片50或者底部的主控芯片50供电。
110.如前所述,中心轴31可以采用阶梯轴,其具有多处直径不同的轴肩,可以在直径相对较大的轴肩内开设引线槽311。
111.可选地,还可以在中心轴31外套设无线供电及无线通信装置,无线供电及无线通信装置中的磁体设置引线槽311。
112.如图6所示,在一种实施例中,激光雷达装置100还包括:
113.导热件40,用于将激光雷达装置100的主控芯片50的热量传导至外部。
114.激光雷达装置100的主控芯片50发热严重,本实施例中,导热件40与主控芯片50进行接触,将热量快速传递到外壳,避免芯片过热影响工作。
115.可选地,导热件40可以连接在主控芯片50与外壳之间,将主控芯片50的热量通过导热件40传导至外壳,再由外壳将热量散发至周围的环境中。
116.可选地,导热件40可以是散热翅片或者散热格栅,导热件40直接与外部环境接触,不经过外壳而直接将主控芯片50的热量散发至周围的环境中
117.如图3所示,在一种实施例中,第一反射镜组12及第二反射镜组22的反射镜结构相同,均包括两个与水平方向具有夹角的反射镜。
118.可选地,反射镜与水平方向的夹角范围为50
°‑
60
°
。
119.第一反射镜组12及第二反射镜组22用于反射光路,在激光雷达内部通过反射镜延长光学系统光程,可有效减小产品直径。
120.在其他实施例中,光接收透镜组23还设有滤光器件,如滤光片,其设置在接收光路上且处于光接收透镜组23的上游。用于滤除环境光并透过激光光束在障碍物上反射形成的回波。
121.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。