1.本发明涉及反蛙人榴弹控制技术,特别是一种反蛙人榴弹的定位控制系统及控制方法。
背景技术:
2.在反蛙人系统中,运用专门的反蛙人武器或派出己方蛙人消灭入侵蛙人是反蛙人作战的关键一环。一般反蛙人榴弹发射器与水下探测系统配套使用,榴弹发射器拥有10个发射管,榴弹最大射程500米,系统可自动探测水下动目标并自动判断威胁态势,确定威胁后自主开火,无需作战人员干预。在水下探测器探测目标后,需要让水上的榴弹向目标进行射击,现有技术中主要存在以下缺陷:一是射击精准度较低,容易发生偏离,无法精确调整榴弹的水平、俯仰角度;二是没有记录时间日志,导致后期无法对各个响应时间进行分析。
3.因此,如何让水上的榴弹精准定位目标并同步射击命令时间进行射击,消灭敌方目标是本发明亟需解决的技术问题。
技术实现要素:
4.本发明的目的是克服现有技术的上述不足而提供一种定位精准,射击精准,时间同步的反蛙人榴弹的定位控制系统及控制方法。
5.本发明的技术方案是:
6.本发明之一种反蛙人榴弹的定位控制系统,包括:
7.上位机,用于设置所需的射击信息、接收水下探测器发送的目标位置信息以及伺服控制器的反馈信息,并向伺服控制器传输命令;
8.伺服控制器,用于接收上位机命令并执行,根据检测到的目标位置信息、榴弹的姿态信息、榴弹的位置信息以及当前榴弹的角度信息计算伺服电机水平、俯仰方位所需旋转的角度,根据射击命令设置的射击信息和计算出的伺服电机水平、俯仰方位所需旋转的角度控制伺服驱动器;以及控制时间同步模块与上位机同步时间;
9.伺服驱动器,用于根据伺服控制器发送的动作指令驱动所对应的伺服电机动作;
10.伺服电机,用于控制榴弹水平旋转、俯仰旋转和射击,并将旋转信息反馈至对应的编码器;
11.编码器,用于记录伺服电机的转动角度,并反馈至伺服控制器。
12.进一步,所述伺服控制器包括:
13.微控制器处理模块,用于接收上位机命令并执行,根据检测到的目标位置信息、榴弹的姿态信息、榴弹的位置信息以及当前榴弹的角度信息计算伺服电机水平、俯仰方位所需旋转的角度,根据射击命令设置的射击信息和计算出的伺服电机水平、俯仰方位所需旋转的角度控制伺服驱动器;以及控制时间同步模块与上位机同步时间;
14.上位机接口模块,用于连接伺服控制器与上位机;
15.伺服接口模块,用于连接伺服控制器与伺服驱动器;
16.编码器接口模块,用于连接伺服控制器与编码器;
17.电源保护模块,用于对伺服控制器进行电源保护;
18.传感模块,用于获取榴弹的姿态信息,并反馈至微控制器处理模块;
19.定位模块,用于获取榴弹的位置信息,并反馈至微控制器处理模块;
20.时间同步模块,由微控制器处理模块控制同步系统时间,记录时间日志;
21.进一步,所述伺服电机包括用于控制榴弹水平方位动作的水平方位伺服电机、用于控制榴弹俯仰方位动作的俯仰方位伺服电机以及用于控制榴弹射击炮弹的枪击伺服电机;所述伺服驱动器包括与水平方位伺服电机连接的水平方位伺服驱动器、与俯仰方位伺服电机连接的俯仰方位伺服驱动器以及与枪击伺服电机连接的枪击伺服驱动器。
22.进一步,所述编码器包括与水平方位伺服电机连接的水平方位编码器、与俯仰方位伺服电机连接的俯仰方位编码器以及与枪击伺服电机连接的枪击控制编码器。
23.进一步,所述伺服接口模块包括:
24.水平伺服驱动接口,用于连接伺服控制器与水平方位伺服驱动器;
25.俯仰伺服驱动接口,用于连接伺服控制器与俯仰方位伺服驱动器;
26.枪击伺服驱动接口,用于连接伺服控制器与枪击伺服驱动器;
27.所述编码器接口模块包括:
28.水平方位编码接口,用于连接伺服控制器与水平方位编码器;
29.俯仰方位编码接口,用于连接伺服控制器与俯仰方位编码器;
30.枪击编码接口,用于连接伺服控制器与枪击控制编码器。
31.本发明之一种反蛙人榴弹的定位控制方法,包括以下步骤:
32.s1:上电,控制榴弹的时间同步模块与上位机同步时间;水下探测器发送目标位置信息至上位机,上位机发送目标位置信息至榴弹并发出射击命令;
33.s2:获取所射击的目标位置信息、榴弹的姿态信息、榴弹的位置信息以及当前榴弹的角度信息;
34.s3:根据s2中获取的相关信息计算出榴弹水平、俯仰方位所需旋转的角度;
35.s4:根据射击命令设置的射击信息和s3中计算出的所需的旋转的角度控制各伺服电机动作,将榴弹调整至目标角度进行射击;并将各伺服电机的旋转位置反馈至对应的编码器。
36.进一步,s1中,控制榴弹的时间同步模块与上位机同步时间的方法包括以下步骤:
37.s1-1:上电后,上位机发出时间同步指令至榴弹的微控制器处理模块;
38.s1-2:微控制器处理模块接收指令控制时间同步模块在下一个时钟脉冲时修改时间;
39.s1-3:上位机发送时间参数至微控制器处理模块;
40.s1-4:微控制器处理模块控制时间同步模块修改时间,时间同步模块修改时间并记录时间日志。
41.进一步,s1中,所述水下探测器发送目标位置信息包括水下探测器的下降距离d和目标位置经纬度。
42.进一步,s3中,所述榴弹水平、俯仰方位所需旋转的角度的计算方法包括以下步骤:
43.s3-1:获取榴弹经纬度以及榴弹自身的俯仰方位角度γ;
44.s3-2:获取当前榴弹的水平方位角度α以及当前榴弹的俯仰方位角度β;
45.s3-3:榴弹的微控制器处理模块根据目标位置经纬度和榴弹经纬度计算出榴弹与目标位置的水平角度θ;从而得到榴弹水平方位需要旋转的角度φ=α θ;
46.s3-4:微控制器处理模块根据榴弹经纬度与目标位置经纬度计算出榴弹与目标位置水平面的距离m,通过水下探测器下降距离d和榴弹与目标位置水平面距离计算出俯仰角δ,从而计算榴弹俯仰方位需要旋转的角度ψ=γ β δ。
47.进一步,s4中,控制各伺服电机动作的方法包括以下步骤:
48.s4-1:微控制器处理模块根据计算得出的水平方位需要旋转的角度φ启动水平方位伺服驱动器控制水平方位伺服电机旋转水平角度;水平方位伺服电机旋转后将结果反馈至水平方位编码器;
49.s4-2:微控制器处理模块根据计算得出的俯仰方位需要旋转的角度ψ启动俯仰方位伺服驱动器控制俯仰方位伺服电机旋转俯仰角度;俯仰方位伺服电机旋转后将结果反馈至俯仰方位编码器;
50.s4-3:微控制器处理模块根据射击命令设置的射击次数,启动枪击伺服驱动器控制枪击伺服电机旋转射击炮弹;射击成功后将枪击伺服电机的旋转结果反馈至枪击控制编码器。
51.本发明的有益效果:
52.(1)通过采用定位模块,能够对水下探测器传输的目标位置进行计算,达到精准定位目的;
53.(3)通过采用传感模块的姿态传感器与定位模块相结合,能够计算出最适合的射击角度,达到精准射击的目的;
54.(3)通过设置编码器,能够记录伺服电机的转动角度位置,提高伺服电机的转动精度,从而配合传感模块和定位模块,达到精准射击目的;
55.(4)通过设置时间同步模块,可精准同步系统时间,记录时间日志,方便后期对各个响应时间的分析。
附图说明
56.图1是本发明实施例控制系统的电路示意框图;
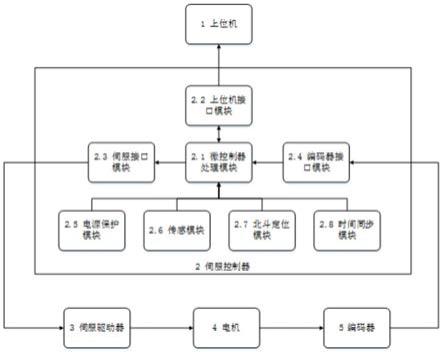
57.图2是本发明实施例控制系统的相应器件的分部示意框图;
58.图3是本发明实施例控制方法的流程示意图。
具体实施方式
59.以下将结合说明书附图和具体实施例对本发明做进一步详细说明。
60.如图1和图2所示:一种反蛙人榴弹的定位控制系统,包括上位机、伺服控制器、伺服驱动器、电机和编码器,上述各器件的具体连接结构及功能如下:
61.1.上位机:用于接收水下探测器发送的水下探测信息和伺服控制器的反馈信息,向伺服控制器传输命令。
62.2.伺服控制器:用于控制伺服驱动器;具体包含:
63.2.1微控制器处理模块:用于接收上位机命令并执行,根据传感模块、北斗定位模块的输出信息获取电机需要旋转的角度,根据射击命令设置的射击次数和计算出的水平、俯仰方位需要调整的角度控制伺服驱动器;以及控制时间同步模块与上位机同步时间。
64.2.2上位机接口模块:用于连接伺服控制器与上位机。
65.2.3伺服接口模块:用于连接伺服控制器与伺服驱动器;具体包含:
66.2.3.1水平伺服驱动接口:用于连接伺服控制器与水平方位伺服驱动器;
67.2.3.2俯仰伺服驱动接口:用于连接伺服控制器与俯仰方位伺服驱动器;
68.2.3.3枪击伺服驱动接口:用于连接伺服控制器与枪击伺服驱动器。
69.2.4编码器接口模块:用于连接伺服控制器与编码器;具体包含:
70.2.4.1水平方位编码接口:用于连接伺服控制器与水平方位编码器;
71.2.4.2俯仰方位编码接口:用于连接伺服控制器与俯仰方位编码器;
72.2.4.3枪击编码接口:用于连接伺服控制器与枪击控制编码器。
73.2.5电源保护模块:用于对伺服控制器进行电源保护。
74.2.6传感模块:用于将各传感器检测到的信息反馈至微控制器处理模块;具体包含:
75.2.6.1姿态传感器:用于检测榴弹的姿态,并将获得的姿态信息反馈至微控制器处理模块;
76.2.6.2温湿度传感器:用于检测榴弹所处环境的温湿度,并反馈至微控制器处理模块。
77.2.7北斗定位模块:用于对榴弹的位置进行卫星定位,并反馈至微控制器处理模块。
78.2.8时间同步模块:由微控制器处理模块控制同步系统时间,记录时间日志,方便后期对时间日志查看与分析。
79.3.伺服驱动器:用于驱动所对应的伺服电机动作;具体包含:
80.3.1水平方位伺服驱动器:用于控制水平方位伺服电机动作;
81.3.2俯仰方位伺服驱动器;用于控制俯仰方位伺服电机动作;
82.3.3枪击伺服驱动器:用于控制枪击伺服电机动作。
83.4.伺服电机:用于控制榴弹水平旋转、俯仰旋转和射击,并将旋转信息反馈至对应的编码器;具体包含:
84.4.1水平方位伺服电机:用于控制榴弹水平旋转;
85.4.2俯仰方位伺服电机:用于控制榴弹俯仰旋转;
86.4.3枪击伺服电机:用于控制榴弹射击炮弹。
87.5.编码器:用于记录伺服电机的转动角度,并反馈至微控制器处理模块;具体包含:
88.5.1水平方位编码器:用于记录水平方位伺服电机转动的水平方位角度;
89.5.2俯仰方位编码器:用于记录俯仰方位伺服电机转动的俯仰方位角度;
90.5.3枪击控制编码器:用于记录枪击伺服电机转动时的射击方位角度。
91.如图3所示:本实施例的控制方法包括以下步骤:
92.s101:反蛙人榴弹、上位机和水下探测器上电;
93.具体地,本实施例中,伺服控制器、伺服驱动器、电机和编码器可均设于反蛙人榴弹上,也可将部分器件设于反蛙人榴弹上,如电机和编码器,其它器件通过线缆与电机和编码器连接。可以说,本发明不限制上述器件的连接位置,只要能够实现本发明的方案即可。另外,上电后,电源保护模块输出稳定电压保护伺服控制器的各模块。
94.s102:微控制器处理模块控制时间同步模块与系统同步时间;水下探测器发送目标位置至上位机,上位机发送目标位置信息至榴弹并发出射击命令。
95.具体地,反蛙人榴弹的微控制器处理模块控制时间同步模块与系统同步时间,具体步骤如下:
96.1)上电后,上位机发出时间同步指令至微控制器处理模块;
97.2)微控制器处理模块接收指令控制时间同步模块在下一个时钟脉冲时修改时间;
98.3)上位机发送时间参数至微控制器处理模块;
99.4)微控制器处理模块控制时间同步模块修改时间,时间同步模块修改时间并记录时间日志。
100.通过时间同步模块,可精准同步系统时间,记录时间日志,方便后期对各个响应时间的分析。
101.s103:微控制器处理模块根据目标位置信息以及北斗定位模块、传感模块、编码器的输出信息获取各伺服电机需要旋转的角度。
102.具体地,各编码器输出所对应的伺服电机旋转的当前绝对位置,传感模块的姿态传感器输出榴弹自身的角度值,北斗定位模块输出榴弹自身的坐标位置,输出的信息均送至微控制器处理模块,微控制模块根据上述信息计算出榴弹水平、俯仰方位需要的旋转角度值,具体的计算方法如下:
103.1)水下探测器发送的目标位置信息包括:水下探测器下降距离d和目标位置经纬度;
104.2)榴弹伺服控制器的北斗定位模块输出榴弹经纬度,姿态传感器输出榴弹自身的俯仰方位角度γ;
105.3)编码器中的水平方位编码器输出当前榴弹的水平方位角度α,俯仰方位编码器输出当前榴弹的俯仰方位角度β;
106.4)微控制器处理模块根据目标位置经纬度和榴弹经纬度计算出榴弹与目标位置的水平角度θ;从而得到榴弹水平方位需要旋转的角度φ=α θ;
107.5)微控制器处理模块根据北斗定位模块输出的榴弹经纬度与目标位置经纬度计算榴弹与目标位置水平面的距离m,通过水下探测器下降距离d和榴弹与目标位置水平面距离可计算出俯仰角δ,从而计算榴弹俯仰方位需要旋转的角度ψ=γ β δ。
108.s104:微控制器处理模块根据接收射击命令设置的射击次数和计算出的水平、俯仰方位需要旋转的角度控制伺服驱动器动作,完成射击,并将相应伺服电机的旋转结构反馈至对应的编码器。
109.具体地,其控制方法如下:
110.1)微控制器处理模块根据计算得出的水平方位需要旋转的角度φ启动水平方位伺服驱动器控制水平方位伺服电机旋转水平角度;水平方位伺服电机旋转后将结果反馈至水平方位编码器;
111.2)微控制器处理模块根据计算得出的俯仰方位需要旋转的角度ψ启动俯仰方位伺服驱动器控制俯仰方位伺服电机旋转俯仰角度;俯仰方位伺服电机旋转后将结果反馈至俯仰方位编码器;
112.3)微控制器处理模块根据射击命令设置的射击次数,启动枪击伺服驱动器控制枪击伺服电机旋转射击炮弹;射击成功后将枪击伺服电机的旋转结果反馈至枪击控制编码器。
113.综上所述,本发明一方面通过传感模块、编码器和北斗定位模块实时输出当前的检测值至微控制器处理模块,以便接收到目标位置时能及时计算出精确角度,从而达到精确射击的目的;另一方面,通过时间同步模块,能够精准同步系统时间,记录时间日志,方便后期对各个响应时间的分析。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
