1.本发明属于物流自动化设备技术领域,具体涉及一种袋装货物自动装卸机器人。
背景技术:
2.目前,虽然物流行业前端自动化程度相对较高,但是针对集装箱等封闭空间内的袋装货物仍要依靠人工或者通过叉车托盘的方式进行装卸,物流行业输送链的末端仍需要人工装卸车,针对集装箱这种封闭空间实现自动化装卸的技术基本处于空白阶段。袋装货物堆叠在集装箱内,由于受集装箱空间的限制,通过传统的机械手抓取货物,经常会受到集装箱侧壁的干涉而无法完成全部袋装货物的抓取,且容易抓烂包装袋。
3.而要想装卸机器人前端的抓手运动灵活需要设置较多的自由度,而多个自由度往往通过多个串联的驱动方式实现,结构复杂,需要较多的驱动电机,一个驱动串联在另一个驱动的输出端,增加了驱动的负载,使得机械手较笨重。
技术实现要素:
4.本发明的目的是克服现有技术中存在的串联驱动的装卸机械手结构复杂、笨重的缺陷,提供一种结构简单,驱动负载小、可以长距离转运货物的袋装货物自动装卸机器人。
5.本发明解决其技术问题所采用的技术方案是:
6.一种袋装货物自动装卸机器人,用于装卸袋装货物至输送带上,其特征在于:包括小臂机构,所述小臂机构包括:两左右相对设置的装卸侧板、用来转运袋装货物的第三输送带、驱动所述第三输送带的第三输送驱动机构以及分别滑动设置在所述装卸侧板上的两滑动侧板;所述滑动侧板上固定安装有装卸导轨,所述装卸侧板上固定安装有与所述装卸导轨相适配的装卸滑块;所述装卸侧板的前端具有向下倾斜的铲起斜坡;所述第三输送带驱动机构包括:装卸电机、安装在所述装卸电机输出轴上的主动同步带轮、安装在所述装卸侧板上的从动同步带轮、与所述从动同步带轮同轴设置的装卸主动辊、转动安装在所述装卸侧板后端的第一装卸从动辊、安装所述铲起斜坡后端的第二装卸从动辊、安装在所述铲起斜坡前端的第三装卸从动辊、安装在所述滑动侧板后部的第四装卸从动辊以及滑动安装在所述装卸侧板上的第五装卸从动辊;第三输送带绕在装卸主动辊上,然后依次顺时针绕过第一装卸从动辊、第二装卸从动辊、第三装卸从动辊、第四装卸从动辊和第五装卸从动辊后绕至装卸主动辊上,形成闭环的第三输送带。
7.进一步地,所述滑动侧板上固定安装有装卸导轨,装卸侧板上固定安装有与所述装卸导轨相适配的装卸滑块;两装卸侧板中间通过装卸上支撑板和装卸下支撑板连接,装卸下支撑板上安装有推动电机,推动电机的输出轴上安装有丝杠螺母副,丝杠螺母副的螺母与连接在两装卸侧板之间的侧板连接板连接。通过丝杠螺母副推动装卸侧板前后移动。
8.进一步地,还包括:转运车、转动安装在所述转运车上的随动输送机构、与所述随动输送机构连接的大臂机构;所述大臂机构与所述小臂机构连接。
9.进一步地,所述转运车包括车架底盘、固定安装在所述车架底盘上的支撑架以及
安装在所述车架底盘四个角的麦克纳姆轮。
10.进一步地,所述随动输送机构包括:通过轴承转动安装在所述支撑架上端的回转基座、固定安装在所述回转基座上的固定架、滑动连接在所述固定架上的活动架、转动安装在所述固定架上的第一动力滚筒、安装在所述固定架后端的第一档边从动滚筒、上下并列安装在所述活动架前端的第二挡边从动滚筒和第三挡边从动滚筒、安装在所述活动架后端的第四从动滚筒、滑动安装在所述固定架前端的第五从动滚筒、设置在所述第一动力滚筒两侧的第一导向辊和第二导向辊;第一输送带依次绕过第一动力滚筒、第一导向辊、第一挡边从动滚筒,然后绕至第一支撑面板的上表面、第二支撑面板的上表面、绕过第二挡边从动滚筒、第三挡边从动滚筒、第四从动滚筒和第五从动滚筒,继续绕过第二导向辊后绕至第一动力滚筒上。
11.进一步地,所述固定架包括两相对设置的固定侧板;所述活动架包括两相对设置的活动侧板;所述固定侧板的内表面固定安装有第一滑块,所述活动侧板的外表面固定安装有与第一滑块对应的第一滑轨;第五从动滚筒的转轴的两端通过张紧机构安装固定侧板。
12.进一步地,所述大臂机构包括:大臂主架板、与所述大臂主架板滑动连接的大臂延长板、转动安装在所述大臂主架板上的第二动力滚筒、安装在所述大臂主架板后端的第一大臂从动滚筒、安装在所述大臂延长板前部的第二大臂从动滚筒和第三大臂从动滚筒、安装在所述大臂延伸板后端的第四大臂从动滚筒以及安装在所述大臂主架板前端的第五大臂从动滚筒、安装在所述大臂主架板后部的第六大臂从动滚筒以及转动安装在所述第二动力滚筒两侧的第一大臂导向辊和第二大臂导向辊;第二输送带依次绕过第二动力滚筒、第一大臂导向辊、第一大臂从动滚筒、第二大臂从动滚筒、第三大臂从动滚筒、第四大臂从动滚筒、第五大臂从动滚筒、第六大臂从动滚筒和第二大臂导向辊后绕至第二动力滚筒上,形成一个总长度不变的闭环输送带。
13.进一步地,所述大臂主架板上固定安装有大臂滑块和大臂延伸调节齿条,大臂延长板上固定安装有大臂滑轨和大臂滑动驱动电机;所述大臂滑块与所述大臂滑轨相适配连接,所述大臂滑动驱动电机的输出轴上同轴安装有大臂延伸调节齿轮,通过所述大臂延伸调节齿轮与所述大臂延伸调节齿条啮合传动实现大臂延长板沿大臂主架板的前后滑动。
14.进一步地,所述小臂机构与所述大臂机构通过二自由度关节连接;所述二自由度关节包括安装在所述大臂延长板前端的关节驱动减速电机,所述关节驱动减速电机包括左关节驱动减速电机和右关节驱动减速电机,所述关节驱动减速电机的输出端连接有主动凸轮,主动凸轮的输出端连接在连杆的后端,连杆的前端连接在从动凸轮的输入端,与从动凸轮的连接的转轴上连接有主动锥齿轮,其中主动锥齿轮分为左主动锥齿轮和右主动锥齿轮,装卸侧板后端固定安装有小臂连接板,小臂连接板上安装有从动锥齿轮,所述左主动锥齿轮和所述右主动锥齿轮在所述从动锥齿轮的左右两侧与所述从动锥齿轮啮合;其中左主动锥齿轮和右主动锥齿轮为规格相同的齿轮。
15.更进一步地,所述随动输送机构和大臂机构通过万向节连接;大臂机构通过角度调节机构安装在转运车的车架底盘上,所述角度调节机构包括:转动安装在所述车架底盘上的第三输送带驱动机构安装在所述车架底盘上的第一电动气缸,所述第一电动气缸的伸缩轴固定安装在所述第三输送带驱动机构上,第三输送带驱动机构和大臂主架板之间具有
大臂支撑杆,大臂支撑杆的下端通过支撑杆下转轴转动连接在角度调节板上,大臂支撑杆的上端通过支撑杆上转轴与所述大臂主架板转动连接;第二电动气缸的固定端安装在第三输送带驱动机构上,其伸缩端安装在所述大臂支撑杆的上端;第三电动气缸的固定端安装在支撑杆下转轴上,其伸缩端安装在大臂固定架上。
16.本发明的一种袋装货物自动装卸机器人的有益效果是:
17.1、通过推动电机边驱动装卸侧板向袋装货物下运动,边通过第三输送带逆时针转动,利用摩擦力搓起包装袋向后输送运出,且最前端的铲起斜坡使输送带更容易伸到袋装货物下方。适用于相对柔软的袋装货物的装卸,本发明结构设计合理,占用空间小且承载能力强,能够实现货箱的自动连续抓取。
18.2、通过两主动锥齿轮同向同速转动,可使连接在小臂连接板上的装卸机构完成上下俯仰动作;当两主动锥齿轮同速反向转动时,可驱动装卸机构完成水平摆动的动作;当两主动锥齿轮同向不同速转动时,可完成俯仰和左右水平摆动的联动。通过控制左主动锥齿轮和右主动锥齿轮的转速和转向实现以两个互相垂直且相交的轴为转动中心的二自由度旋转运动,两个旋转运动可以单独动作,也可以联动。制造简单、安装方便紧凑,两个主动锥齿轮实现了分别驱动,减小了侧轴所受的扭矩,降低了驱动电机所需的功率,进而降低了成本。通过简单的结构实现装卸装置的多自由度运动以实现不同位置装货或卸货的要求。
19.3、通过角度调节机构实时调节小臂机构前端的姿态以适应装卸货物的需要,并且大臂机构能够在转运车停止在一定的位置后,根据装卸位置的需要小范围调节大臂机构的第二输送带用来输送货物的长度,而避免了时刻需要调整转运车的位置的麻烦。随动输送机构的第一输送带的用来输送货物的长度也可以根据大臂机构角度的调整而随动伸缩,整个装卸机器人相互协调性能好。
附图说明
20.下面结合附图和具体实施方式对本发明作进一步详细的说明。
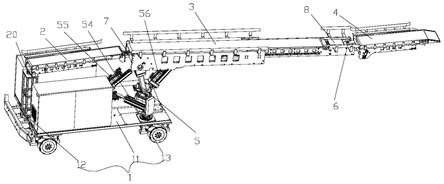
21.图1是本发明实施例的一种袋装货物自动装卸机器人整体结构图;
22.图2是本发明实施例随动输送机构立体图;
23.图3是本发明实施例的随动输送机构部分结构图;
24.图4是本发明实施例的部分机构图;
25.图5是本发明实施例的角度调节机构立体图;
26.图6是本发明实施例的大臂机构立体图;
27.图7是本发明实施例的大臂机构部分结构图;
28.图8是本发明实施例的大臂机构另一视角部分结构图;
29.图9是本发明实施例的小臂机构立体图;
30.图10是本发明实施例的小臂机构部分结构图;
31.图11是本发明实施的二自由度关节立体图;
32.图12是本发明实施例双窄带机构立体图。
33.图中:1、转运车,11、车架底盘,12、支撑架,13、麦克纳姆轮,2、随动输送机构,20、回转基座,21、第一动力滚筒, 22、固定架,221、固定侧板,222、第一支撑面板,223、第一下连接板,23、活动架,231、第二支撑面板,232、活动侧板,24、第一档边从动滚筒,25、第二挡
边从动滚筒,26、第三挡边从动滚筒, 27、第四从动滚筒,28、第五从动滚筒,29、第一导向辊,210、第二导向辊,211、第一滑轨,212、第一滑块,213、张紧调节螺纹杆, 214、张紧块,215、调节螺栓,216、张紧槽,217、第一输送带,3、大臂机构,30、大臂主架板,31、大臂延长板,32、第二动力滚筒, 33、第一大臂从动滚筒,34、第二大臂从动滚筒,35、第三大臂从动滚筒,36、第四大臂从动滚筒,37、第五大臂从动滚筒,38、第六大臂从动滚筒,39、第一大臂导向辊,310、第二大臂导向辊,311、第二输送带,312、大臂滑块,313、大臂延伸调节齿条,314、大臂滑轨,315、大臂滑动驱动电机,316、大臂延伸调节齿轮,4、小臂机构,40、滑动侧板,41、装卸导轨,42、装卸滑块,43、装卸侧板, 431、铲起斜坡,44、装卸电机,45、主动同步带轮,46、从动同步带轮,47、装卸主动辊,48、第三输送带,49、第一装卸从动辊,410、第二装卸从动辊,411、第三装卸从动辊,412、第四装卸从动辊,413、第五装卸从动辊,415、装卸上支撑板,416、装卸下支撑板,417、推动电机,418、丝杠螺母副,5、角度调节机构,50、第三输送带驱动机构,,51、大臂支撑杆,52、支撑杆下转轴,53、支撑杆上转轴, 54、第一电动气缸,55、第二电动气缸,56、第三电动气缸,6、二自由度关节,61、左关节驱动减速电机,62、右关节驱动减速电机, 63、从动凸轮,64、主动凸轮,65、连杆,66、左主动锥齿轮,67、右主动锥齿轮,68、从动锥齿轮,69、小臂连接板,7、万向节,8、窄带传动机构,81、第三动力滚筒,82、第一窄带从动辊,83、第二窄带从动辊,84、第一皮带托辊,85、第二皮带托辊,86、窄带。
具体实施方式
34.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
35.本实施例中提到到“前”“后”以转运车在后,小臂机构在前为参考标准。
36.如图1-图12所示的本发明的一种袋装货物自动装卸机器人的具体实施例,包括:转运车1、转动安装在转运车1上的随动输送机构2、与随动输送机构2连接的大臂机构3以及与大臂机构3连接的小臂机构4。
37.参见图1、图4和图5,转运车1包括车架底盘11、固定安装在车架底盘11上的支撑架12以及安装在车架底盘11四个角的麦克纳姆轮13。
38.结合图1-图3,随动输送机构2包括:通过轴承转动安装在支撑架12上端的回转基座20、固定安装在回转基座20上的固定架22、滑动连接在固定架22上的活动架23、转动安装在固定架22上的第一动力滚筒21、安装在固定架22后端的第一档边从动滚筒24、上下并列安装在活动架23前端的第二挡边从动滚筒25和第三挡边从动滚筒26、安装在活动架23后端的第四从动滚筒27、滑动安装在固定架 22前端的第五从动滚筒28、设置在第一动力滚筒21两侧的第一导向辊29和第二导向辊210;固定架22包括两相对设置的固定侧板221、连接在固定架22上端的第一支撑面板222以及连接在固定架22下端的第一下连接板223,活动架23包括两相对设置的活动侧板232和连接在活动侧板232之间的第二支撑面板231。上层第一输送带217 贴合在第一支撑面板222和第二支撑面板231上表面。下层第一输送带217贴合在第一下连接板223的下表面。固定侧板221的内表面固定安装有第一滑块212,活动侧板232的外表面固定安装有与第一滑块212对应的第一滑轨211。第五从动滚筒28的转轴通过张紧机构安装在固定侧板221上,张紧机构包括两相对安装固定在固定侧板上的张紧块214、螺纹连接安装在两张紧块214上的张紧调节螺纹杆213 以及套设在两张紧块214之间
的张紧调节螺纹杆213上调节螺栓215,固定侧板上具有张紧槽216,第五从动滚筒28的转轴穿过张紧槽216 后连接在张紧调节螺纹杆213上,通过前后调节张紧调节螺纹杆213 实现第五从动滚筒28前后位置的调节以张紧第一输送带217。
39.本实施例中将第一滑块212设置在固定架22的内侧面上,而将第一滑轨211固定在活动架23的外侧面,安装固定方便,且不容易卡死。
40.第一输送带217依次绕过第一动力滚筒21、第一导向辊29、第一挡边从动滚筒,然后绕至第一支撑面板222的上表面、第二支撑面板231的上表面、绕过第二挡边从动滚筒25、第三挡边从动滚筒26、第四从动滚筒27和第五从动滚筒28,继续绕过第二导向辊210后绕至第一动力滚筒21上。
41.参见图4-图8,大臂机构3包括:大臂主架板30、与大臂主架板30滑动连接的大臂延长板31、转动安装在大臂主架板30上的第二动力滚筒32、安装在大臂主架板30后端的第一大臂从动滚筒33、安装在大臂延长板31前部的第二大臂从动滚筒34和第三大臂从动滚筒35、安装在大臂延伸板后端的第四大臂从动滚筒36以及安装在大臂主架板30前端的第五大臂从动滚筒37、安装在大臂主架板30后部的第六大臂从动滚筒38以及转动安装在第二动力滚筒32两侧的第一大臂导向辊39和第二大臂导向辊310。第二输送带311依次绕过第二动力滚筒32、第一大臂导向辊39、第一大臂从动滚筒33、第二大臂从动滚筒34、第三大臂从动滚筒35、第四大臂从动滚筒36、第五大臂从动滚筒37、第六大臂从动滚筒38和第二大臂导向辊310后绕至第二动力滚筒32上;形成一个总长度不变的闭环输送带;其中第二大臂从动滚筒34和第三大臂从动滚筒35之间的输送带、第三大臂从动滚筒35与第四大臂从动滚筒36之间的输送带、第四大臂从动滚筒36和第五大臂从动滚筒37之间的输送带、以及第五大臂从动滚筒37和第六大臂从动滚筒38之间的输送带形成四层重合部分,通过调节四层重合部分的长度可以调节最上层用来输送货物的第二输送带311的长度。
42.大臂主架板30上具有固定安装有大臂滑块312和大臂延伸调节齿条313,大臂延长板31上固定安装有大臂滑轨314和大臂滑动驱动电机315;大臂滑块312与大臂滑轨314相适配连接,大臂滑动驱动电机315的输出轴上同轴安装有大臂延伸调节齿轮316,通过大臂延伸调节齿轮316与大臂延伸调节齿条313啮合传动实现大臂延长板 31沿大臂主架板30的前后滑动,进而实现最上层用来输送货物的第二输送带311的长度。
43.大臂主架板30的上端具有用来支撑上层第二输送带311的大臂输送带上层垫板,大臂主架板30的下端具有用来支撑下层第二输送带311的大臂输送带下层垫板。
44.其中第一输送带217和第二输送带311都是位于中间的宽带,长距离输送防止袋装货物的掉落,
45.大臂延长板31的前端还具有与第二输送带311对接的很短的一段双窄带输送机构,双窄带输送机构方便与小臂机构4实现连接。
46.参见图12,双窄带输送机构为左右对称设置的两条窄带传动机构8,窄带传动机构8包括转动安装在大臂延长板31上的第三动力滚筒81、安装在大臂延长板31的侧板上的第一窄带从动辊82、第二窄带从动辊83、安装在大臂延长板31前端的两上下设置的第一皮带托辊84和第二皮带托辊85,窄带86绕在第三动力滚筒81上,逆时针依次绕过第一皮带托辊84、第二皮带托辊85、第一窄带从动辊82、和第二窄带从动辊83后绕至第三动力滚筒81上,形成闭环输送带。
47.随动输送机构2和大臂机构3通过万向节7连接;大臂机构3通过角度调节机构5安装在转运车1的车架底盘11上,参见图4和图5,角度调节机构5包括:转动安装在车架底盘11上的第三输送带驱动机构50安装在车架底盘11上的第一电动气缸54,第一电动气缸 54的伸缩轴固定安装在第三输送带驱动机构50上,第三输送带驱动机构50和大臂主架板30之间具有大臂支撑杆51,大臂支撑杆51的下端通过支撑杆下转轴52转动连接在角度调节板上,大臂支撑杆51 的上端通过支撑杆上转轴53与大臂主架板30转动连接;第二电动气缸55的固定端安装在第三输送带驱动机构50上,其伸缩端安装在大臂支撑杆51的上端;第三电动气缸56的固定端安装在支撑杆下转轴 52上,其伸缩端安装在大臂固定架22上。通过第一电动气缸54推动第三输送带驱动机构50转动带动大臂机构3绕垂直轴转动,使大臂机构3左右摆动。通过第二电动气缸55和第三电动气缸56的协同动作推动大臂机构3上下俯仰运动。
48.小臂机构4与大臂机构3通过二自由度关节6连接。
49.参见图9和图10,小臂机构4包括:两左右相对设置的装卸侧板43、用来转运袋装货物的第三输送带48、驱动第三输送带48 的第三输送驱动机构以及分别滑动设置在装卸侧板43上的两滑动侧板40;滑动侧板40上固定安装有装卸导轨41,装卸侧板 43上固定安装有与装卸导轨41相适配的装卸滑块42;装卸侧板43的前端具有向下倾斜的铲起斜坡431;第三输送带驱动机构包括:装卸电机44、安装在装卸电机44输出轴上的主动同步带轮45、安装在装卸侧板43上的从动同步带轮46、与从动同步带轮46同轴设置的装卸主动辊47、设置在装卸主动辊47两侧的第一装卸导向辊和第二装卸导向辊、转动安装在装卸侧板 43后端的第一装卸从动辊49、安装铲起斜坡431后端的第二装卸从动辊410、安装在铲起斜坡431前端的第三装卸从动辊411、安装在滑动侧板40后部的第四装卸从动辊412以及滑动安装在装卸侧板43上的第五装卸从动辊413;第三输送带48绕在装卸主动辊47上,然后依次顺时针绕过第一装卸导向辊、第一装卸从动辊49、第二装卸从动辊410、第三装卸从动辊411、第四装卸从动辊412、第五装卸从动辊413和第二装卸导向辊后绕至装卸主动辊47上,形成闭环的第三输送带48。滑动侧板40上固定安装有装卸导轨41,装卸侧板43上固定安装有与装卸导轨 41相适配的装卸滑块42。两装卸侧板43中间通过装卸上支撑板415和装卸下支撑板416连接,装卸下支撑板416上安装有推动电机417,推动电机417的输出轴上安装有丝杠螺母副418,丝杠螺母副418的螺母与连接在两装卸侧板43之间的侧板连接板连接。通过丝杠螺母副418推动装卸侧板43前后移动。
50.当小臂机构4从仓库中取袋装货物时,通过推动电机417 边驱动装卸侧板43向袋装货物下运动,边使第三输送带48逆时针转动,通过摩擦力搓起包装袋向后输送运出。最前端的铲起斜坡431使输送带更容易伸到袋装货物的下方。
51.为了防止袋装货物在输送过程中从输送带上掉落,第一输送带217、第二输送带311和第三输送带48的两侧均安装有货物挡板。
52.参见图11,二自由度关节6包括安装在大臂延长板31前端的关节驱动减速电机,关节驱动减速电机包括左关节驱动减速电机61和右关节驱动减速电机62,关节驱动减速电机的输出端连接有主动凸轮64,主动凸轮64的输出端连接在连杆65的后端,连杆65的前端连接在从动凸轮63的输入端,与从动凸轮63的连接的转轴上连接有主动锥齿轮,其中主动锥齿轮分为左主动锥齿轮66和右主动锥齿轮 67,装卸侧板43后端固定安装有小臂连接板69,小臂连接板69上安装有从动锥齿轮68,左主动锥齿轮66和右主动锥齿轮67在从动锥齿轮68
的左右两侧与从动锥齿轮68啮合。其中左主动锥齿轮66 和右主动锥齿轮67为规格相同的齿轮。
53.二自由度关节6可驱动装卸机构实现俯仰和左右水平摆动两个自由度的运动,具有三种控制方式:、两主动锥齿轮同向同速转动,可使连接在小臂连接板69上的装卸机构完成上下俯仰动作;、当两主动锥齿轮同速反向转动时,可驱动装卸机构完成水平摆动的动作;、当两主动锥齿轮同向不同速转动时,可完成俯仰和左右水平摆动的联动。
54.左主动锥齿轮66和右主动锥齿轮67通过不同的电机分别驱动,由此减小了侧轴所受扭矩,降低了驱动电机所需的功率,进而降低了成本。
55.左主动锥齿轮66和右主动锥齿轮67均通过连杆65刚性传动,且通过凸轮可以满足所需的转动角度,相比带传动等柔性传动,使小臂机构4在工作过程中不会出现抖动和打滑现象,结构更稳定可靠。
56.本发明实施例的袋装货物自动装卸机器人的卸货过程为:
57.袋装货物自动装卸机器人为适应集装箱或仓库内货物的位置的变化,宏观的整体运动通过麦克纳姆轮13实现。
58.位于前端的小臂机构4为适应袋装货物左右方向的位置以及上下方向的位置变化提供过二自由度关节6、角度调节机构5以及随动输送机构2协同动作实现。具体地,当需要装卸仓库或者集装箱内堆叠的袋装货物时,这里仍以卸货为例,转运车1先运动到一个合适的位置,保证小臂机构4前端的铲起斜坡431可以运动到袋装货物下方,通过第一电动气缸54使大臂机构3左右摆动,通过第二电动气缸55 和第三电动气缸56的协同动作调整大臂机构3的俯仰运动,同时随动输送机构2的活动架23跟随大臂机构3沿第一滑块212滑动。同时可以根据需要调节的大臂机构3的整体长度以补偿小臂机构4三自由度运动的需求。袋装货物被小臂机构4最前端的铲起斜坡431铲起后依次通过第三输送带48、双窄带86、第二输送带311和第三输送带48将袋装货物运出。
59.将袋装货物装入集装箱的工作过程与上述卸箱过程相反,这里不做赘述应当理解,以上所描述的具体实施例仅用于解释本发明,并不用于限定本发明。由本发明的精神所引伸出的显而易见的变化或变动仍处于本发明的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
