技术特征:
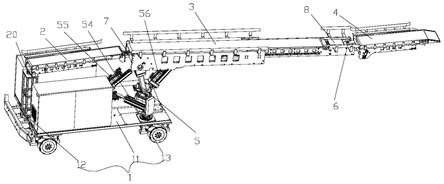
1.一种袋装货物自动装卸机器人,用于装卸袋装货物至输送带上,其特征在于:包括小臂机构(4),所述小臂机构(4)包括:两左右相对设置的装卸侧板(43)、用来转运袋装货物的第三输送带(48)、驱动所述第三输送带(48)的第三输送驱动机构以及分别滑动设置在所述装卸侧板(43)上的两滑动侧板(40);所述滑动侧板(40)上固定安装有装卸导轨(41),所述装卸侧板(43)上固定安装有与所述装卸导轨(41)相适配的装卸滑块(42);所述装卸侧板(43)的前端具有向下倾斜的铲起斜坡(431);所述第三输送带驱动机构包括:装卸电机(44)、安装在所述装卸电机(44)输出轴上的主动同步带轮(45)、安装在所述装卸侧板(43)上的从动同步带轮(46)、与所述从动同步带轮(46)同轴设置的装卸主动辊(47)、转动安装在所述装卸侧板(43)后端的第一装卸从动辊(49)、安装所述铲起斜坡(431)后端的第二装卸从动辊(410)、安装在所述铲起斜坡(431)前端的第三装卸从动辊(411)、安装在所述滑动侧板(40)后部的第四装卸从动辊(412)以及滑动安装在所述装卸侧板(43)上的第五装卸从动辊(413);第三输送带(48)绕在装卸主动辊(47)上,然后依次顺时针绕过第一装卸从动辊(49)、第二装卸从动辊(410)、第三装卸从动辊(411)、第四装卸从动辊(412)和第五装卸从动辊(413)后绕至装卸主动辊(47)上,形成闭环的第三输送带(48)。2.根据权利要求1所述的一种袋装货物自动装卸机器人,其特征在于:两装卸侧板(43)中间通过装卸上支撑板(415)和装卸下支撑板(416)连接,装卸下支撑板(416)上安装有推动电机(417),推动电机(417)的输出轴上安装有丝杠螺母副(418),丝杠螺母副(418)的螺母与连接在两装卸侧板(43)之间的侧板连接板连接。通过丝杠螺母副(418)推动装卸侧板(43)前后移动。3.根据权利要求1所述的一种袋装货物自动装卸机器人,其特征在于:还包括:转运车(1)、转动安装在所述转运车(1)上的随动输送机构(2)、与所述随动输送机构(2)连接的大臂机构(3);所述大臂机构(3)与所述小臂机构(4)连接。4.根据权利要求3所述的一种袋装货物自动装卸机器人,其特征在于:所述转运车(1)包括车架底盘(11)、固定安装在所述车架底盘(11)上的支撑架(12)以及安装在所述车架底盘(11)四个角的麦克纳姆轮(13)。5.根据权利要求4所述的一种袋装货物自动装卸机器人,其特征在于:所述随动输送机构(2)包括:通过轴承转动安装在所述支撑架(12)上端的回转基座(20)、固定安装在所述回转基座(20)上的固定架(22)、滑动连接在所述固定架(22)上的活动架(23)、转动安装在所述固定架(22)上的第一动力滚筒(21)、安装在所述固定架(22)后端的第一档边从动滚筒(24)、上下并列安装在所述活动架(23)前端的第二挡边从动滚筒(25)和第三挡边从动滚筒(26)、安装在所述活动架(23)后端的第四从动滚筒(27)、滑动安装在所述固定架(22)前端的第五从动滚筒(28)、设置在所述第一动力滚筒(21)两侧的第一导向辊(29)和第二导向辊(210);第一输送带(217)依次绕过第一动力滚筒(21)、第一导向辊(29)、第一挡边从动滚筒,然后绕至第一支撑面板(222)的上表面、第二支撑面板(231)的上表面、绕过第二挡边从动滚筒(25)、第三挡边从动滚筒(26)、第四从动滚筒(27)和第五从动滚筒(28),继续绕过第二导向辊(210)后绕至第一动力滚筒(21)上。6.根据权利要求5所述的一种袋装货物自动装卸机器人,其特征在于:所述固定架(22)包括两相对设置的固定侧板(221);所述活动架(23)包括两相对设置的活动侧板(232);所述固定侧板(221)的内表面固定安装有第一滑块(212),所述活动侧板(232)的外表面固定
安装有与第一滑块(212)对应的第一滑轨(211);第五从动滚筒(28)的转轴的两端通过张紧机构安装固定侧板(221)。7.根据权利要求5所述的一种袋装货物自动装卸机器人,其特征在于:所述大臂机构(3)包括:大臂主架板(30)、与所述大臂主架板(30)滑动连接的大臂延长板(31)、转动安装在所述大臂主架板(30)上的第二动力滚筒(32)、安装在所述大臂主架板(30)后端的第一大臂从动滚筒(33)、安装在所述大臂延长板(31)前部的第二大臂从动滚筒(34)和第三大臂从动滚筒(35)、安装在所述大臂延伸板后端的第四大臂从动滚筒(36)以及安装在所述大臂主架板(30)前端的第五大臂从动滚筒(37)、安装在所述大臂主架板(30)后部的第六大臂从动滚筒(38)以及转动安装在所述第二动力滚筒(32)两侧的第一大臂导向辊(39)和第二大臂导向辊(310);第二输送带(311)依次绕过第二动力滚筒(32)、第一大臂导向辊(39)、第一大臂从动滚筒(33)、第二大臂从动滚筒(34)、第三大臂从动滚筒(35)、第四大臂从动滚筒(36)、第五大臂从动滚筒(37)、第六大臂从动滚筒(38)和第二大臂导向辊(310)后绕至第二动力滚筒(32)上,形成一个总长度不变的闭环输送带。8.根据权利要求7所述的一种袋装货物自动装卸机器人,其特征在于:所述大臂主架板(30)上固定安装有大臂滑块(312)和大臂延伸调节齿条(313),大臂延长板(31)上固定安装有大臂滑轨(314)和大臂滑动驱动电机(315);所述大臂滑块(312)与所述大臂滑轨(314)相适配连接,所述大臂滑动驱动电机(315)的输出轴上同轴安装有大臂延伸调节齿轮(316),通过所述大臂延伸调节齿轮(316)与所述大臂延伸调节齿条(313)啮合传动实现大臂延长板(31)沿大臂主架板(30)的前后滑动。9.根据权利要求7所述的一种袋装货物自动装卸机器人,其特征在于:所述小臂机构(4)与所述大臂机构(3)通过二自由度关节(6)连接;所述二自由度关节(6)包括安装在所述大臂延长板(31)前端的关节驱动减速电机,所述关节驱动减速电机包括左关节驱动减速电机(61)和右关节驱动减速电机(62),所述关节驱动减速电机的输出端连接有主动凸轮(64),主动凸轮(64)的输出端连接在连杆(65)的后端,连杆(65)的前端连接在从动凸轮(63)的输入端,与从动凸轮(63)的连接的转轴上连接有主动锥齿轮,其中主动锥齿轮分为左主动锥齿轮(66)和右主动锥齿轮(67),装卸侧板(43)后端固定安装有小臂连接板(69),小臂连接板(69)上安装有从动锥齿轮(68),所述左主动锥齿轮(66)和所述右主动锥齿轮(67)在所述从动锥齿轮(68)的左右两侧与所述从动锥齿轮(68)啮合;其中左主动锥齿轮(66)和右主动锥齿轮(67)为规格相同的齿轮。10.根据权利要求3-7任一项所述的袋装货物自动装卸机器人,其特征在于:所述随动输送机构(2)和大臂机构(3)通过万向节(7)连接;大臂机构(3)通过角度调节机构(5)安装在转运车(1)的车架底盘(11)上,所述角度调节机构(5)包括:转动安装在所述车架底盘(11)上的第三输送带驱动机构(50)安装在所述车架底盘(11)上的第一电动气缸(54),所述第一电动气缸(54)的伸缩轴固定安装在所述第三输送带驱动机构(50)上,第三输送带驱动机构(50)和大臂主架板(30)之间具有大臂支撑杆(51),大臂支撑杆(51)的下端通过支撑杆下转轴(52)转动连接在角度调节板上,大臂支撑杆(51)的上端通过支撑杆上转轴(53)与所述大臂主架板(30)转动连接;第二电动气缸(55)的固定端安装在第三输送带驱动机构(50)上,其伸缩端安装在所述大臂支撑杆(51)的上端;第三电动气缸(56)的固定端安装在支撑杆下转轴(52)上,其伸缩端安装在大臂固定架(22)上。
技术总结
本发明属于物流自动化设备技术领域,具体涉及一种袋装货物自动装卸机器人,小臂机构包括:装卸侧板、第三输送带、第三输送驱动机构以及滑动侧板;滑动侧板上固定安装有装卸导轨,装卸侧板上固定安装有与装卸导轨相适配的装卸滑块;装卸侧板的前端具有向下倾斜的铲起斜坡;第三输送带绕在装卸主动辊上,然后依次顺时针绕过第一装卸从动辊、第二装卸从动辊、第三装卸从动辊、第四装卸从动辊和第五装卸从动辊后绕至装卸主动辊上,形成闭环的第三输送带。本发明通过推动电机边驱动装卸侧板向袋装货物下运动,边通过第三输送带逆时针转动,利用摩擦力搓起包装袋向后输送运出。本发明结构设计合理,占用空间小且承载能力强。占用空间小且承载能力强。占用空间小且承载能力强。
技术研发人员:刘金 李浩 温帅雄 郭琪 胡威 王洪波 石立宏 刘汉斌 关云彪 朱振泽 石少华 李宁 张宇 王玉博
受保护的技术使用者:唐山海容机器人应用技术研究院
技术研发日:2020.10.29
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。