1.本实用新型涉及点胶设备技术领域,特别涉及一种半自动异形点胶设备。
背景技术:
2.目前,点胶机,就是在半导体、芯片、通讯产品等表面点、涂胶水,根据特定的产品设定配套的路径编程,以便实现更好粘接效果的一种全自动点胶机自动化点胶设备。
3.现有点胶机的针头在进行多次点胶后,在针头外壁上会残留胶液,为了及时清理残留的胶液而不影响点胶进程,常常需要工作人员对针头外壁进行擦拭。一旦针头被利用频繁时,则会需要工人花费较多时间去清理,导致工作效率较低。
4.故需要提供一种半自动异形点胶设备来解决上述的问题。
技术实现要素:
5.本实用新型涉及一种半自动异形点胶设备,该半自动异形点胶设备采用了胶水清洁单元可以实现自动对点胶针头进行清洗,解决了现有技术中需要人工清洗点胶针头导致工作效率较低的问题。
6.为解决上述问题,本实用新型的内容为:一种半自动异形点胶设备,其包括:
7.机箱;
8.封胶平台单元,设置在所述机箱上端,用于放置产品;
9.点胶单元,架设在所述机箱上,所述点胶单元设置有点胶针头,所述点胶针头位于所述封胶平台单元的上方,所述点胶单元用于对所述封胶平台单元上的产品进行点胶作业;
10.供胶单元,设置在所述机箱上,且位于所述点胶单元的一侧,用于对所述点胶单元提供胶水;以及,
11.胶水清洁单元,设置在所述机箱上,且位于所述点胶单元的另一侧;所述胶水清洁单元包括安装板、无尘布与针嘴擦拭清洁夹子组件;所述安装板设置在机箱上,所述安装板的一侧设置有针嘴擦拭清洁夹子组件,所述无尘布设置在所述针嘴擦拭清洁夹子组件的上方,所述针嘴擦拭清洁夹子组件设置有夹持通道,所述夹持通道内设置有两个夹紧块,两个所述的夹紧块用于挤压擦拭所述点胶针头。
12.本实用新型所述的半自动异形点胶设备中,所述针嘴擦拭清洁夹子组件包括驱动气缸、第一夹臂以及第二夹臂。所述驱动气缸设置在所述安装板上,所述驱动气缸设置有两个输出轴。所述第一夹臂与所述驱动气缸的其中一个输出轴连接,所述第二夹臂与所述驱动气缸的另一个输出轴连接。所述第一夹臂与所述第二夹臂之间设置有所述夹持通道,两个所述夹紧块分别与所述第一夹臂、所述第二夹臂可拆卸连接,便于安装与维修。所述驱动气缸用于驱动所述第一夹臂与所述第二夹臂分开或者远离,使得两个所述夹紧块夹紧所述无尘布内包裹的所述点胶针头,自动化清洗,提高擦拭效果。
13.进一步的,所述第一夹臂上设置有第一卡槽,所述第二夹臂上设置有第二卡槽,一
个所述夹紧块与所述第一卡槽卡设连接,另一个所述夹紧块与所述第二卡槽卡设连接,安拆便捷,便于更换维修。所述第一夹臂、其中一个所述夹紧块与所述第二夹臂、另一个所述夹紧块对称设置,使得作用力均衡设置,有利于保护所述点胶针头。
14.进一步的,所述夹紧块设置为柔性材质,可以兼容不同尺寸的所述点胶针头,同时也有利于保护所述点胶针头。
15.进一步的,所述胶水清洁单元还包括固定块与酒精喷射针头,所述固定块的一端设置在所述安装板的另一侧,所述固定块的另一端与所述酒精喷射针头连接,所述酒精喷射针头位于所述安装板的上端,所述酒精喷射针头的喷射口位于所述夹持通道的上方,用于对所述无尘布进行酒精浸湿,便于调整所述酒精喷射针头的位置,清洗更方便,同时也节约酒精成本。
16.进一步的,所述胶水清洁单元还包括自动排胶接胶盒,所述自动排胶接胶盒设置在所述安装板的一侧,所述自动排胶接胶盒设置有容纳腔,所述容纳腔用于存储所述点胶针头内的残留的胶水,提高清洗效果,保护设备的清洁。
17.进一步的,所述胶水清洁单元还包括送料卷、收料卷、第一转杆、第二转杆、第一锁紧块、第二锁紧块与传送轴装置。所述送料卷设置有第一内孔,所述收料卷设置有第二内孔,所述无尘布的一端与所述送料卷连接,所述无尘布的另一端与所述收料卷连接,可以确保持续提供干净的所述无尘布,提高工作效率。所述第一转杆与所述第二转杆均设置在所述安装板上,所述第一转杆的一端穿射过所述第一内孔与所述第一锁紧块连接,所述第二转杆的一端穿射过所述第二内孔与所述第二锁紧块连接,分别用于紧固所述送料卷与所述收料卷。所述第一锁紧块与所述第二锁紧块的外周均设置有便于旋转的防滑槽,提高安装效率以及紧固效果。所述传送轴装置用于使所述无尘布从所述送料卷往所述收料卷移动。
18.进一步的,所述传送轴装置包括多个张拉轮、卷布轮驱动步进电机以及放步轮驱动阻尼器。多个所述张拉轮设置在所述送料卷与所述收料卷之间,用于布设所述无尘布的传输路径。所述卷布轮驱动步进电机设置在所述安装板的另一侧,所述第一转杆与所述第二转杆的另一端均穿射过所述安装板,且均设置有皮带轮。所述卷布轮驱动步进电机的输出轴与第一转杆之间通过皮带传动连接,用于带动所述收料卷转动。所述放步轮驱动阻尼器设置在所述安装板上,所述放步轮驱动阻尼器的轴承与所述第二转杆通过皮带传动连接,用于停止作业时停止所述收料卷转动,防止所述送料卷随意转动,浪费资源。
19.进一步的,所述封胶平台单元包括导轨、伺服电机与平台。所述导轨设置在所述机箱的上表面,所述平台滑动设置在所述导轨上,所述伺服电机设置在所述导轨的一侧,且所述伺服电机通过丝杠驱动所述平台沿所述导轨滑动。所述平台的下端设置有真空吸附装置,用于使所述平台与所述导轨紧贴,防止所述平台滑出设定范围。
20.进一步的,所述机箱上设置有支撑架,所述点胶单元设置在支撑架上。所述点胶单元包括运动装置、保温装胶桶与撞针阀。所述运动装置设置在所述支撑架上,用于驱动所述点胶针头运动。所述保温装胶桶设置在所述支撑架上,所述保温装胶桶的出胶口与所述撞针阀连接。所述撞针阀与所述点胶针头连接,所述撞针阀采用可加热气动结构。所述撞针阀加温是通过控制器调节,具有加温控制精确、加温速度快、可加温度高等功能。
21.本实用新型由于采用了上述的半自动异形点胶设备,相较于现有技术,其有益效果为:本实用新型涉及一种半自动异形点胶设备,该半自动异形点胶设备包括机箱、封胶平
台单元、点胶单元、供胶单元以及胶水清洁单元。点胶单元的点胶针头对封胶平台单元上的产品完成点胶作业后,移送至胶水清洁单元。无尘布在两个夹紧块之间包裹点胶针头,两个夹紧块的侧壁配合无尘布对点胶针头的外侧壁进行擦拭清理,大大提高了工作效率,解决了现有技术中需人工清理导致工作效率较低的问题。
附图说明
22.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面对实施例中所需要使用的附图作简单的介绍,下面描述中的附图仅为本实用新型的部分实施例相应的附图。
23.图1为本实用新型的半自动异形点胶设备的一实施例的主视图。
24.图2为本实用新型的半自动异形点胶设备的封胶平台单元的一实施例的结构示意图。
25.图3为本实用新型的半自动异形点胶设备的点胶单元的一实施例的主视图。
26.图4为图3中b的放大示意图。
27.图5为本实用新型的半自动异形点胶设备的供胶单元的一实施例的结构示意图。
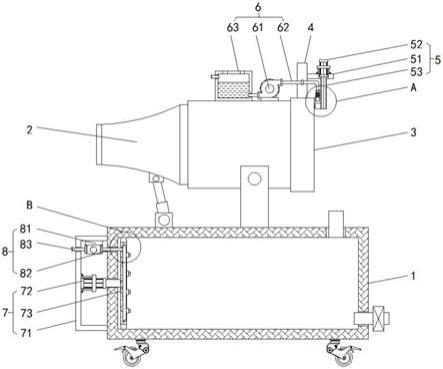
28.图6为本实用新型的半自动异形点胶设备的胶水清洁单元的一实施例的结构示意图。
29.图7为本实用新型的半自动异形点胶设备的传送轴装置的一实施例的结构示意图。
30.图8为图6中a的放大示意图。
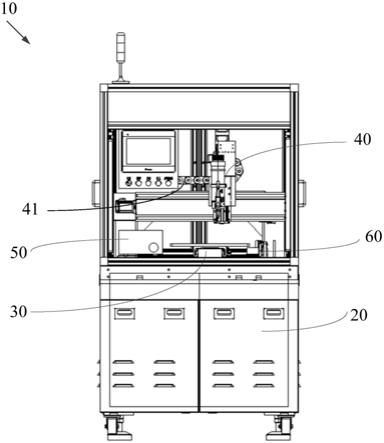
31.图中:10.半自动异形点胶设备,20.机箱,21.支撑架,30.封胶平台单元,31.导轨,32.伺服电机,33.平台,40.点胶单元,41.运动装置,411.x方向轴伺服电机,412.高精度导轨,413.支撑板,414.z方向丝杆模组,42.保温装胶桶,43.撞针阀,44.点胶针头,50.供胶单元,60.胶水清洁单元,61.安装板,62.送料卷,621.第一转杆,622.第一锁紧块,63.收料卷,631.第二转杆,632.第二锁紧块,64.传送轴装置,641.张拉轮,642.卷布轮驱动步进电机,643.放步轮驱动阻尼器,644.皮带轮,65.无尘布,66.固定块,67.酒精喷射针头,68.针嘴擦拭清洁夹子组件,681.驱动气缸,682.第一夹臂,683.第二夹臂,684.夹紧块,69.自动排胶接胶盒。
具体实施方式
32.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
33.本实用新型中所提到的方向用语,例如「上」、「下」、「前」、「后」、「左」、「右」、「内」、「外」、「侧面」、「顶部」以及「底部」等词,仅是参考附图的方位,使用的方向用语是用以说明及理解本实用新型,而非用以限制本实用新型。
34.在图中,结构相似的单元是以相同标号表示。
35.请参照图1,在本实施例中,该半自动异形点胶设备10包括机箱20、封胶平台单元
30、点胶单元40、供胶单元50以及胶水清洁单元60。
36.在本实施例中,请参照图2,封胶平台单元30包括导轨31、伺服电机32与平台33。导轨31设置在机箱20的上表面,平台33滑动设置在导轨31上,伺服电机32设置在导轨31的一侧,且伺服电机32通过高精度丝杠驱动平台33沿导轨31滑动。平台33的下端设置有真空吸附装置,用于使平台33与导轨31紧贴,防止平台33滑出设定范围。而且,平台33也配置了调平结构,有利于精确定位产品的位置。
37.在本实施例中,请参照图3、图4,机箱20的上端架设有支撑架21,该点胶单元40设置在支撑架21上,点胶单元40用于点胶路径x、z的位移,使点胶单元40对封胶平台单元30上的产品进行点胶作业。点胶单元40可以支持点胶平面不一致点胶,解决了异形点胶位置高度变化的难点。点胶单元40包括运动装置41、保温装胶桶42与撞针阀43。运动装置41设置在支撑架21上,用于驱动点胶针头44运动。运动装置41包括x方向轴伺服电机411、高精度丝杆、高精度导轨412、支撑板413、z方向轴伺服电机以及z方向丝杆模组414。x方向轴伺服电机411设置在支撑架21的一端,x方向轴伺服电机411通过高精度丝杠与支撑板413传动连接。支撑板413与高精度导轨412滑动连接,x方向轴伺服电机411驱动支撑板413沿高精度导轨412在x方向往复运动。z方向轴伺服电机与z方向丝杆模组414均设置在支撑板413上,z方向轴伺服电机与z方向丝杆模组414传动连接。保温装胶桶42滑动设置在支撑板413上,保温装胶桶42与z方向丝杆模组414传动连接。保温装胶桶42的出胶口与撞针阀43连接。撞针阀43与点胶针头44连接,撞针阀43采用可加热气动结构。撞针阀43加温是通过控制器调节,具有加温控制精确、加温速度快、可加温度高等功能。撞针阀43是千分尺式调节出胶量大小,可以精确控制出胶大小。解决了热熔胶水点胶大小头的难点以及热熔胶水点胶拉丝现象的难点。点胶动作软件是x、y、z三轴联动插补,可点圆形、圆弧等路径。
38.在本实施例中,请参照图5,供胶单元50设置在机箱20上,且位于点胶单元40的一侧。供胶单元50与保温装胶桶42连通,用于对点胶单元40提供胶水。供胶单元50采用日本进口武藏品牌的点胶系统控制器,供胶压力精度可达0.005mpa*cm2(0.05kgf),有效保证吐胶精度、供胶输出的气压的稳定,对气动撞针阀43的气压开关精确控制。
39.在本实施例中,请参照图6、图7,该胶水清洁单元60设置在机箱20上,且位于点胶单元40的另一侧。胶水清洁单元60包括安装板61、送料卷62、收料卷63、传送轴装置64、无尘布645、固定块646、酒精喷射针头67、针嘴擦拭清洁夹子组件68与自动排胶接胶盒69。安装板61设置在机箱20上,安装板61的一侧设置有针嘴擦拭清洁夹子组件68。
40.请参照图8,该针嘴擦拭清洁夹子组件68包括驱动气缸681、第一夹臂682、第二夹臂683以及两个夹紧块684。驱动气缸681设置在安装板61上,驱动气缸681设置有两个输出轴。第一夹臂682与驱动气缸681的其中一个输出轴连接,第二夹臂683与驱动气缸681的另一个输出轴连接。驱动气缸681用于驱动第一夹臂682与第二夹臂683分开或者远离,使得两个夹紧块684夹紧无尘布645内包裹的点胶针头44,自动化清洗,提高擦拭效果。第一夹臂682与第二夹臂683之间设置有夹持通道,夹持通道内设置有两个夹紧块684,两个的夹紧块684用于挤压擦拭点胶针头44。夹紧块684设置为柔性材质,可以兼容不同尺寸的点胶针头44,同时也有利于保护点胶针头44。两个夹紧块684分别与第一夹臂682、第二夹臂683可拆卸连接,便于安装与维修。其中,第一夹臂682上设置有第一卡槽,第二夹臂683上设置有第二卡槽,一个夹紧块684与第一卡槽卡设连接,另一个夹紧块684与第二卡槽卡设连接,安拆
便捷,便于更换维修。第一夹臂682、其中一个夹紧块684与第二夹臂683、另一个夹紧块684对称设置,使得作用力均衡设置,有利于保护点胶针头44。在两个夹紧块684相接触的一侧的上端设置有与点胶针头44相匹配的半圆槽,便于点胶针头44进入到两个夹紧块684之间进行擦拭。
41.其中,固定块646的一端设置在安装板61的另一侧,固定块646的另一端与酒精喷射针头67连接,酒精喷射针头67位于安装板61的上端,酒精喷射针头67的喷射口位于夹持通道的上方,用于对无尘布645进行酒精浸湿,便于调整酒精喷射针头67的位置,清洗更方便,同时也节约酒精成本。自动排胶接胶盒69设置在安装板61上,自动排胶接胶盒69设置有容纳腔,容纳腔用于存储点胶针头44内的残留的胶水,提高清洗效果,保护设备的清洁。
42.在本实施例中,送料卷62设置有第一内孔,收料卷63设置有第二内孔,无尘布645的一端与送料卷62连接,无尘布645的另一端与收料卷63连接,可以确保持续提供干净的无尘布645,提高工作效率。第一转杆621与第二转杆631均设置在安装板61上,第一转杆621的一端穿射过第一内孔与第一锁紧块622连接,第二转杆631的一端穿射过第二内孔与第二锁紧块632连接,分别用于紧固送料卷62与收料卷63。第一锁紧块622与第二锁紧块632的外周均设置有便于旋转的防滑槽,便于工作人员旋拧,提高安装效率以及紧固效果。
43.传送轴装置64用于使无尘布645从送料卷62往收料卷63移动。该传送轴装置64包括多个张拉轮641、卷布轮驱动步进电机642以及放步轮驱动阻尼器643。多个张拉轮641设置在送料卷62与收料卷63之间,用于布设无尘布645的传输路径。其中,用于擦拭处的无尘布645设置在夹紧块684与酒精喷射针头67之间。卷布轮驱动步进电机642设置在安装板61的另一侧,第一转杆621与第二转杆631的另一端均穿射过安装板61,且均设置有皮带轮644。卷布轮驱动步进电机642的输出轴与第一转杆621之间通过皮带传动连接,用于带动收料卷63转动。放步轮驱动阻尼器643设置在安装板61上,放步轮驱动阻尼器643的轴承与第二转杆631通过皮带传动连接,用于停止作业时停止收料卷63转动,防止送料卷62随意转动,导致资源浪费。
44.下面对该本实施例中的半自动异形点胶设备10的工作原理进行阐述。
45.启动控制系统,将产品放置在平台33上,伺服电机32驱动平台33在导轨31上滑动到点胶的位置。点胶动作软件控制x方向轴伺服电机411驱动支撑板413以及其上的设备共同运动至产品的上方。然后,点胶动作软件控制z方向轴伺服电机驱动保温装胶桶42、撞针阀43以及点胶针头44上下运动。同时,通过撞针阀43的控制作用,胶水从点胶针头44流出,点胶针头44在产品上进行点胶作业。点胶完成后,x方向轴伺服电机411驱动点胶针头44移动到自动排胶接胶盒69处,将点胶针头44内残留的胶水排到自动排胶接胶盒69内。x方向轴伺服电机411驱动点胶针头44移动到擦拭位置,酒精喷射针头67喷出酒精,使酒精洒在无尘布645上与点胶针头44相对应的位置上,浸湿无尘布645。接着,z方向轴伺服电机驱动点胶针头44下移,点胶针头44带动无尘布645进入两个夹紧块684之间,无尘布645与半圆槽贴合,驱动气缸681驱动第一夹臂682与第二夹臂683合拢,使两个夹紧块684挤压,提高无尘布645对点胶针头44的擦拭效果。擦拭完成,回复到初始位置,准备下一次的点胶作业。
46.本实用新型由于采用了上述的半自动异形点胶设备,相较于现有技术,其有益效果为:本实用新型涉及一种半自动异形点胶设备,该半自动异形点胶设备包括机箱、封胶平台单元、点胶单元、供胶单元以及胶水清洁单元。点胶单元的点胶针头对封胶平台单元上的
产品完成点胶作业后,移送至胶水清洁单元。无尘布在两个夹紧块之间包裹点胶针头,两个夹紧块的侧壁配合无尘布对点胶针头的外侧壁进行擦拭清理,大大提高了工作效率,解决了现有技术中需人工清理导致工作效率较低的问题。
47.综上,虽然本实用新型已以优选实施例揭露如上,但上述优选实施例并非用以限制本实用新型,本领域的普通技术人员,在不脱离本实用新型的精神和范围内,均可作各种更动与润饰,因此本实用新型的保护范围以权利要求界定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。