1.本实用新型涉及仿生手指技术领域,尤其涉及一种实现分段弯曲的模块化气动软体仿人手指及其模具。
背景技术:
2.手指是人类探索世界、与世界互动的重要桥梁。机械手可以复制人手结构性、功能性、灵巧性,将代替人类在医疗服务、航空航天、工业控制等众多领域工作。基于硅胶材料制作的气动软体手指是与目标对象交互的新型执行部件,具有柔软、自由度大、易变形、绿色环保等优点。受到全世界科研机构和学者们的广泛关注。
3.然而不足的是,目前已有的气动软体手指仿人化程度较低,充气后大多只能实现单一(常曲率)弯曲,无法像人手指一样分段、分关节弯曲,这直接导致现存软体手指难以适应复杂多变的应用场景,很难代替人手完成大多数的日常工作。同时,人手的指节数(例如拇指两节,其余四指三节)、指节长短又不尽相同,依次制作五根手指又存在研发周期长、设计冗余繁琐、制造成本高等弊端。因此,实现一款可仿人手指分段弯曲以适应各种复杂应用场景,且具有模块化,指节之间易于安装与拆卸的软体仿人手指具有极强的实用价值和重要研究意义。
4.目前关于软体仿人手的研究,如申请号为2019010811350.9的中国实用新型专利申请公开了一种多关节分段弯曲的软体辅助手套,该装置一根手指中设有三段气腔,使用时可指定气腔充气,以达到辅助人手不同关节弯曲的目的。然而该装置的多段气腔采用一体化制造,不仅加工过程复杂,可扩展性低,且装置任意一处受损就会导致整体报废,造成极大的浪费。又如申请号为201810186688.5的中国实用新型专利申请公开了一种模块化软体机械臂,该装置设有三段机械臂,可以通过环形接插件依次相连,便于拆卸与安装。但是其通过单气管通气,无法做到分段弯曲,极大限制了手臂的全空间运动。另外,该装置接插件部分设计繁琐且密封性较差,难以承受较大气压。
5.因此,目前已有的软体手指或多或少存在无法分段弯曲或模块化程度低等问题。
技术实现要素:
6.有鉴于此,为了解决软体手指无法分段弯曲难以适应复杂多变的应用场景的问题,本实用新型的实施例提供了一种实现分段弯曲的模块化气动软体仿人手指其模具。
7.本实用新型的实施例提供一种实现分段弯曲的模块化气动软体仿人手指,包括多个通过磁吸依次连接的仿生指节,每一所述仿生指节包括硅胶材质封闭腔体及与所述封闭腔体内部连通的气管,所述封闭腔体为截面为拱形的柱状腔体,所述封闭腔体侧壁的平面部分内部设有限制轴向伸长的应变限制层,所述封闭腔体侧壁的弧面部分内部设有约束径向膨胀的纤维缠绕层,以使所述封闭腔体充气时朝向所述应变限制层一侧弯曲。
8.进一步地,所述仿生指节的数量为三个,每一所述仿生指节的长度为3cm。
9.进一步地,每一所述仿生指节两端均嵌设有磁铁。
10.进一步地,所述封闭腔体包括两端开口的腔体基体和两封口件,每一所述封口件一端嵌入所述封闭腔体端口、另一端设有嵌设有所述磁铁。
11.进一步地,所述应变限制层为不可伸展柔性片,所述纤维缠绕层为环绕所述封闭腔体弧面部分均匀缠绕的纤维线。
12.本实用新型的实施例提供的一种实现分段弯曲的模块化气动软体仿人手指的技术方案带来的有益效果是:一方面设置多个可分段弯曲的仿生指节,可单独控制任意仿生指节弯曲,模仿人手指通过多个关节分段“骨骼化”弯曲,以适应各种复杂应用场景,可代替人手完成抓取等大多数的日常工作;另一方面模块化设计提高可扩展性,便于安装与拆卸。
13.另外本实用新型的实施例还提供了一种上述实现分段弯曲的模块化气动软体仿人手指的模具,包括第一模具和第二模具;
14.所述第一模具的内腔内设有腔棒,所述腔棒的截面为拱形;
15.所述第二模具的内腔与所述第一模具的内腔形状截面形状均为拱形,且所述第二模具截面积大于所述第一模具内腔截面积,以使所述第一模具内注塑成型的注塑件可置于所述第二模具内腔内。
16.进一步地,所述第一模具包括第一主模具、第一模具盖和所述腔棒,其中所述第一主模具设有上部和侧面开口的内腔,所述第一模具盖与所述第一主模具侧面盖合,所述腔棒置于所述第一主模具内部;
17.所述第二模具包括第二主模具和第二模具盖,其中所述第二主模具设有上部和侧面开口的内腔,所述第二模具盖与所述第二主模具侧面盖合。
18.进一步地,所述第一主模具内壁设有螺纹,所述一模具盖内壁设有多道间隔设置的凸条。
19.本实用新型的实施例提供的一种实现分段弯曲的模块化气动软体仿人手指的模具的技术方案带来的有益效果是:采用注塑成型的方法制作上述实现分段弯曲的模块化气动软体仿人手指,在成型过程中将应变限制层和缠绕纤维增强层填充于仿生指节侧壁的内部,可快速成型,操作工艺简单。
附图说明
20.图1是本实用新型一种可分段弯曲的模块化气动软体仿人手指的示意图;
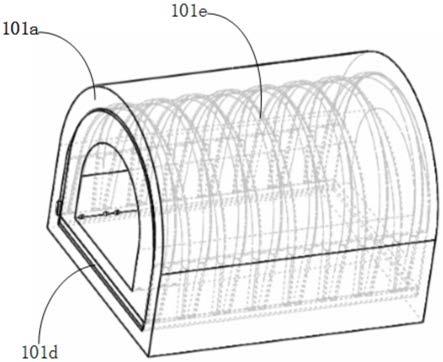
21.图2是图1中仿生指节1的示意图;
22.图3是腔体基体101a与封口件101b的连接示意图;
23.图4是腔体基体101a的内部结构示意图;
24.图5是腔体基体101a的纵向截面图;
25.图6是第一模具3的示意图;
26.图7是第一腔体2的示意图;
27.图8是第二模具4的示意图;
28.图9是腔体基体101a的示意图。
29.图中:1-仿生指节、101-封闭腔体、101a-腔体基体、101b-封口件、101c-磁铁、101d-应变限制层、101e-纤维缠绕层、102-气管、2-第一腔体、201-凹陷部、202-螺旋线槽、3-第一模具、301-第一主模具、301a-螺纹、302-第一模具盖、302a-凸条、303-腔棒、4-第二
模具、401-第二主模具、402-第二模具盖。
具体实施方式
30.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型实施方式作进一步地描述。
31.请参考图1、2、4和5,本实用新型的实施例提供了一种实现分段弯曲的模块化气动软体仿人手指,包括多个通过磁吸依次连接的仿生指节1,每一所述仿生指节1包括硅胶材质封闭腔体101及与所述封闭腔体101内部连通的气管102,所述封闭腔体101为截面为拱形的柱状腔体,所述封闭腔体101侧壁的平面部分内部设有限制轴向伸长的应变限制层101d,所述封闭腔体101侧壁的弧面部分内部设有约束径向膨胀的纤维缠绕层101e,以使所述封闭腔体101充气时朝向所述应变限制层101d一侧弯曲。
32.具体的,所述仿生指节1的数量可以为多个,对此不作限制,可根据实际应用场景进行选择。考虑到人的手指有三个弯曲关节,优选的所述仿生指节1的数量设置为三个,本实施例中以三个所述仿生指节1做示例性说明。同时人的手指长度约为8~10cm,宽度约为1~1.5cm,这里设置每一所述仿生指节1的长度约为3cm,宽度约为1.2cm。
33.所述封闭腔体101由硅胶注塑成型,硅胶材料选择econflex00-10硅胶,具有硅胶拉伸强度大,邵氏刚度低的优点。所述封闭腔体101为柱状,其包括两端开口的腔体基体101a及分别封堵所述腔体基体101a两端的两封口件101b。
34.请参考图4和5,所述腔体基体101a在注塑成型过程中所述应变限制层101d和所述纤维缠绕层101e被填充于所述封闭腔体101侧壁内部。所述应变限制层101d优选为玻璃纤维、纸片等不可伸展柔性片。所述纤维缠绕层101e在注塑成型时由双螺旋缠绕于所述封闭腔体101侧壁内部的纤维线形成。
35.所述封闭腔体101的截面形状设置为拱形,与人的手指的形状类似。此时所述应变限制层101d设置于所述封闭腔体101侧壁的平面部分,所述纤维缠绕层101e设置于所述封闭腔体101侧壁的弧形部分。优选的所述纤维线均匀缠绕于所述封闭腔体101侧壁的弧面部分使所述纤维缠绕层101e均匀分布。
36.请参考图2和3,相邻两所述仿生指节1之间可以通过多种可拆卸连接方式进行连接,这里每一所述仿生指节1两端均设有磁铁101c,相邻两所述仿生指节1通过磁吸连接。具体的,所述封口件101b可插入所述腔体基体101a的端口且背离所述腔体基体101a端口一端的端面设有凹槽,所述磁铁101c嵌入所述凹槽内。任意两所仿生指节1可以通过端部的磁铁101c相互吸附连接。所述凹槽和所述磁铁101c的形状可以不做限制,只需满足所述凹槽与所述磁铁101c的形状相适配、满足嵌入安装即可。
37.上述可分段弯曲的模块化气动软体仿人手指,可单独对各所述仿生指节1充气,在充气时所述仿生指节1侧壁设有应变限制层101d一侧受限无法轴向伸展,而设有纤维缠绕层101e一侧被约束无法径向膨胀,进而使所述仿生指节1弯曲。这样可以控制任意仿生指节1弯曲、及弯曲程度,模仿人手指通过多个关节分段“骨骼化”弯曲,以适应各种复杂应用场景。
38.另外,为了实现对上述实现分段弯曲的模块化气动软体仿人手指的制作,本实用新型的实施例还提供了一种实现分段弯曲的模块化气动软体仿人手指的模具,包括第一模
具3和第二模具4;
39.所述第一模具3的内腔内设有腔棒303,所述腔棒303的截面为拱形,所述第一模具3用于注塑成型第一腔体2。所述第一模具3具体包括第一主模具301、第一模具盖302和所述腔棒303,其中所述第一主模具301设有上部和侧面开口的内腔,所述第一模具盖302与所述第一主模具301侧面盖合,所述腔棒303置于所述第一主模具301内部。
40.所述第二模具4用于容置所述第一腔体2,并对布置所述应变限制层101d和所述限位缠绕层101e后的第一腔体2进行再次注塑形成所述腔体基体101a。所述第二模具4的内腔与所述第一模具3的内腔形状截面形状均为拱形,且所述第二模具4的内腔截面积大于所述第一模具3内腔截面积,以使所述第一模具3内注塑成型的注塑件(第一腔体2)可置于所述第二模具4内腔内。所述第二模具4具体包括第二主模具401和第二模具盖402,其中所述第二主模具401设有上部和侧面开口的内腔,所述第二模具盖402与所述第二主模具401侧面盖合。为方便脱模,在所述第一模具盖302和所述第二模具盖402的背部均设置有拱形拉手。
41.另外为了便于在所述第一腔体表面布置所述应变限制层101d和所述纤维缠绕层101e,所述第一主模具301的内壁设有螺纹301a,所述第一模具盖302内壁沿着竖直方向设有多个间隔的凸条302a,
42.使用上述实现分段弯曲的模块化气动软体仿人手指的模具制作该实现分段弯曲的模块化气动软体仿人手指的方法,包括以下步骤:
43.请参考图6和7,首先通过第一模具3注塑成型制作出第一腔体2,所述第一腔体2两端开口,在所述第一腔体2外壁相对两侧分别贴附应变限制层101d和缠绕纤维缠绕层101e。
44.在注塑成型前先将所述第一主模具301和所述第一模具盖302拼接形成第一模具外壳,第一模具外壳内部形成拱形柱状腔体,然后将所述腔棒303竖直插入所述第一模具外壳内,之后由所述第一模具3上端的开口倒入硅胶,硅胶固化后形成第一腔体2。由于所述腔棒303的存在,所述第一腔体2两端开口、内部形成与腔棒303形状相同的腔体。在注塑前先在所述第一模具3内壁均匀涂抹凡士林润滑剂。
45.所述第一腔体2成型后,其外壁弧形部分设有螺旋线槽202,直接在所述螺旋线槽202内缠绕纤维线即形成纤维缠绕层101e。所述第一腔体2外壁平面部分形成多个凹陷部201,将贴附应变限制层101d分别贴入各所述凹陷部201即可。
46.请参考图8和9,然后将所述第一腔体2放入第二模具4中注塑成型形成腔体基体101a,所述应变限制层101d和纤维缠绕层101e被填充于所述腔体基体101a侧壁内,在所述腔体基体101a侧壁开口并在开口处设置气管102。
47.在所述第二模具4内放入第一腔体2后对所述第二模具4内浇入硅胶进行注塑形成腔体基体101a。所述第一腔体2外壁上的应变限制层101d和纤维缠绕层101e均被填充入所述腔体基体101a的侧壁。
48.在所述腔体基体101a成型后在其侧壁开口,并将所述气管102插入所述开口,然后通过胶粘将所述气管102与所述腔体基体101a密封连接。
49.之后通过两封口件101b分别密封所述腔体基体101a两端形成仿生指节1。
50.所述封口件101b同样可以注塑成型,其一端与所述腔体基体101a的端口相适配且可插接,另一端设有用于安装磁铁101c的凹槽。将两所述封口件101b分别的凹槽分别装上磁铁101c后,再分别插入所述腔体基体101a两端,形成所述仿生指节1,这样所述仿生指节1
两端均具有磁铁101c。
51.最后重复上述步骤根据实际需要制作多个仿生指节1,相邻两所述仿生指节1可通过磁铁101c吸附连接,进而多个仿生指节1可以通过磁吸的方式依次可拆卸组合连接形成上述实现分段弯曲的模块化气动软体仿人手指。
52.在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本技术请求保护的范围。
53.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
54.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。