一种pack箱体成型模具抓手机构
技术领域
1.本实用新型涉及pack箱体成型模具搬运设备技术领域,特别是一种pack箱体成型模具抓手机构。
背景技术:
2.传统的pack箱体成型模具抓取方式主要分为手动搬运、叉车和行吊搬运方式,但使用叉车和行吊pack箱体成型模具抓取方式都存在产品掉落风险,手动搬运过程中存在产品掉落砸伤人员风险,且费时费力,生产效率低下。
技术实现要素:
3.本实用新型的目的在于提供一种pack箱体成型模具抓手机构,能够对pack箱体成型模具进行搬运且防止pack箱体成型模具掉落。
4.为实现上述目的,本实用新型提供如下技术方案:一种pack箱体成型模具抓手机构,包括pack箱体成型模具,还包括一机器人连接法兰,所述机器人连接法兰的下表面设置有第一连接板,所述第一连接板的下表面设置有抓手支架,所述抓手支架的前后悬挂架底部均设置有用于抓取所述pack箱体成型模具的抓手组件。
5.进一步的,所述抓手组件包括第二连接板、第一l型固定架、第二l型固定架、第三l型固定架、支撑块、定位轴、行程开关、气缸、柱形销、锁紧气缸、止回销、第一活动接头、第二活动接头、钣金支架,所述抓手支架的前后悬挂架底部左右两端对称设置有所述第二连接板,所述抓手支架的前悬挂架左端的所述第二连接板与所述抓手支架的后悬挂架右端的所述第二连接板上均设置有第一l型固定架,所述第一l型固定架上设置有所述行程开关;位于所述抓手支架的同一悬挂架上的两个所述第二连接板相邻端均开设有用于固定第二l型固定架的第一凹槽,所述第一凹槽内设置有所述第二l型固定架,两个所述第二l型固定架的竖板相对面上均设置有所述锁紧气缸,所述锁紧气缸的输出端贯穿所述第二l型固定架的竖板并延伸至所述第二l型固定架的竖板另一侧,所述锁紧气缸的输出端设置有所述第一活动接头,所述第一活动接头的末端设置有所述柱形销,所述第二连接板的下表面中部设置有用于支撑柱形销的所述支撑块,所述支撑块上开设有与所述柱形销相匹配的第一通孔,所述柱形销的与所述活动接头相连接一侧设置有所述钣金支架,所述第二连接板的下表面与所述第一凹槽相对一端设置有两个用于定位所述箱体成型模具的定位轴;所述抓手支架的前后悬挂架左右侧上端均设置有所述第三l型固定架,所述第三l型固定架的横板上设置有所述气缸,所述气缸的输出端贯穿所述第三l型固定架的横板并延伸至所述第三l型固定架的下方,所述气缸的输出端设置有所述第二活动接头,所述第二活动接头的末端设置有所述止回销,所述抓手支架的前后悬挂架上开设有与所述止回销相匹配的第二通孔,所述第二连接板上开设有与第二通孔相连通的第三通孔,所述支撑块上设置有与所述第三通孔相连通的第四通孔,所述第四通孔与所述第一通孔相连通,所述柱形销的顶部设置有与所述止回销相匹配的第五通孔。
6.进一步的,所述第二连接板的侧面设置有与所述钣金支架相匹配的槽型光电。
7.进一步的,靠近所述支撑块的所述定位轴上开设有与所述柱形销相匹配用于增大柱形销受力面的第二凹槽。
8.进一步的,所述锁紧气缸的外侧设置有防护板,所述防护板的左右两端分别固定在左右两个所述第二连接板上。
9.本实用新型的有益效果:本实用新型实现了pack箱体成型模具机器人自动化抓取,提高产品搬运效率,避免产品在抓取过程中掉落风险,避免人员在搬运过程中受到伤害;抓取机构通过定位轴对产品进行定位,行程开关对产品进行高度到位检测,当行程开关检测pack箱体成型模具到位时锁紧气缸伸出,对pack箱体成型模具锁紧后,气缸上的止回销对锁紧气缸上的柱形销进行定位,形成互锁,防止锁紧气缸突然缩回。
附图说明
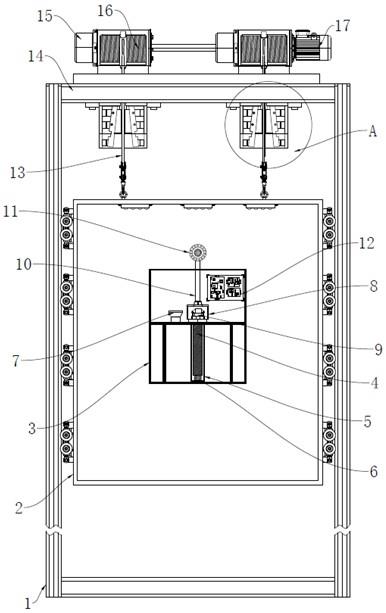
10.图1为本实用新型搬运pack箱体成型模具的状态图;
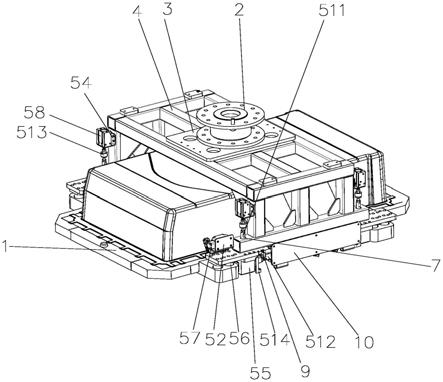
11.图2为本实用新型的结构示意图;
12.图3为行程开关的结构示意图;
13.图4为柱形销的结构示意图;
14.图5为槽型光电的结构示意图。
具体实施方式
15.下面结合附图对本实用新型做进一步说明。
16.请参阅图1至图5,本实用新型提供了一实施例:一种pack箱体成型模具抓手机构,包括pack箱体成型模具1,还包括一机器人连接法兰2,所述机器人连接法兰2的下表面设置有第一连接板3,所述第一连接板3的下表面设置有抓手支架4,所述抓手支架4的前后悬挂架底部均设置有用于抓取所述pack箱体成型模具1的抓手组件5。机器人连接法兰2用于连接机器人与第一连接板3,第一连接板3用于将抓手支架4固定在连接法兰上,抓手支架4用于固定抓手组件5,抓手组件5用于搬运pack箱体成型模具1并防止搬运过程中掉落。
17.请继续参阅图1与图2所示,本实用新型一实施例中,所述抓手组件5包括第二连接板51、第一l型固定架52、第二l型固定架53、第三l型固定架54、支撑块55、定位轴56、行程开关57、气缸58、柱形销59、锁紧气缸510、止回销511、第一活动接头512、第二活动接头513、钣金支架514,所述抓手支架4的前后悬挂架底部左右两端对称设置有所述第二连接板51,所述抓手支架4的前悬挂架左端的所述第二连接板51与所述抓手支架4的后悬挂架右端的所述第二连接板51上均设置有第一l型固定架52,所述第一l型固定架52上设置有所述行程开关57;位于所述抓手支架4的同一悬挂架上的两个所述第二连接板51相邻端均开设有用于固定第二l型固定架53的第一凹槽(未图示),所述第一凹槽(未图示)内设置有所述第二l型固定架53,两个所述第二l型固定架53的竖板相对面上均设置有所述锁紧气缸510,所述锁紧气缸510的输出端贯穿所述第二l型固定架53的竖板并延伸至所述第二l型固定架53的竖板另一侧,所述锁紧气缸510的输出端设置有所述第一活动接头512,所述第一活动接头512的末端设置有所述柱形销59,所述第二连接板51的下表面中部设置有用于支撑柱形销59的所述支撑块55,所述支撑块55上开设有与所述柱形销59相匹配的第一通孔6,所述柱形销59
的与所述活动接头相连接一侧设置有所述钣金支架514,所述第二连接板51的下表面与所述第一凹槽(未图示)相对一端设置有两个用于定位所述箱体成型模具的定位轴56;所述抓手支架4的前后悬挂架左右侧上端均设置有所述第三l型固定架54,所述第三l型固定架54的横板上设置有所述气缸58,所述气缸58的输出端贯穿所述第三l型固定架54的横板并延伸至所述第三l型固定架54的下方,所述气缸58的输出端设置有所述第二活动接头513,所述第二活动接头513的末端设置有所述止回销511,所述抓手支架4的前后悬挂架上开设有与所述止回销511相匹配的第二通孔7,所述第二连接板51上开设有与第二通孔7相连通的第三通孔(未图示),所述支撑块55上设置有与所述第三通孔(未图示)相连通的第四通孔(未图示),所述第四通孔(未图示)与所述第一通孔6相连通,所述柱形销59的顶部设置有与所述止回销511相匹配的第五通孔8。第二连接板51用于放置第一l型固定架52、第二l型固定架53、第三l型固定架54、支撑块55、定位轴56,第一l型固定架52用于固定行程开关57,第二l型固定架53用于固定锁紧气缸510,第三l型固定架54用于固定气缸58,支撑块55用于支撑柱形销59,为柱形销59卡入pack箱体成型模具1的卡槽后搬运过程中提供支撑点,防止pack箱体成型模具1过重导致锁紧气缸510与柱形销59的连接处发生断裂,定位轴56用于与pack箱体成型模具1的定位孔进行连接,从而完成对pack箱体成型模具1的定位,行程开关57用于检测抓手组件5是否有接触到pack箱体成型模具1,气缸58用于带动止回销511上下移动,柱形销59用于卡入pack箱体成型模具1的卡槽,从而对pack箱体成型模具1进行搬运,锁紧气缸510用于带动柱形销59左右移动,从而实现对pack箱体成型模具1搬运的固定与拆卸,止回销511用于固定柱形销59,防止锁紧气缸510在搬运pack箱体成型模具1的过程中缩回从而带动柱形销59缩回导致pack箱体成型模具1掉落,第一活动接头512用于将锁紧气缸510与柱形销59进行连接,第二活动接头513用于将气缸58与止回销511进行连接,钣金支架514用于与槽型光电9配合检测柱形销59的左右移动是否到位。
18.请继续参阅图1与图5所示,本实用新型一实施例中,所述第二连接板51的侧面设置有与所述钣金支架514相匹配的槽型光电9。槽型光电9用于与钣金支架514相配合,检测柱形销59的左右移动是否到位,防止柱形销59移动不到位导致未将pack箱体成型模具1放置在工位的情况下将pack箱体成型模具1带回。
19.请继续参阅图1与图2所示,本实用新型一实施例中,靠近所述支撑块55的所述定位轴56上开设有与所述柱形销59相匹配用于增大柱形销59受力面的第二凹槽(未图示)。
20.请继续参阅图1与图2所示,本实用新型一实施例中,所述锁紧气缸510的外侧设置有防护板10,所述防护板10的左右两端分别固定在左右两个所述第二连接板51上。防护板10用于在搬运pack箱体成型模具1过程中发生撞击时保护锁紧气缸510。
21.本实用新型具有以下工作原理:pack箱体成型模具1达到指定工位时,机器人带动所述机器人连接法兰2移动,所述机器人连接法兰2带动所述第一连接板3移动,所述第一连接板3带动所述抓手支架4移动,所述抓手支架4带动所述第二连接板51移动,所述第二连接板51带动所述定位轴56对所述pack箱体成型模具1进行定位,机器人下降到位后,所述行程开光检测到所述pack箱体成型模具1后,所述锁紧气缸510动作伸出,所述锁紧气缸510带动所述柱形销59卡入所述pack箱体成型模具1的卡槽内,同时所述气缸58伸出带动所述止回销511对所述柱形销59进行定位锁紧,防止所述锁紧气缸510突然缩回和在断气断电情况下形成保护,避免所述pack箱体成型模具1发生掉落风险;机器人将所述pack箱体成型模具1
搬运到下个工位后,所述锁紧气缸510和所述气缸58缩回,所述槽型光电9对所述钣金支架514进行到位进行信号检测所述锁紧气缸510回到原来未伸出的位置,防止未将所述pack箱体成型模具1放置在工位的情况下将所述pack箱体成型模具1带回。
22.本实用新型中的槽型光电、行程开关均为现有技术,本领域中的技术人员已经能够清楚了解,在此不进行详细说明,槽型光电的型号可以是h92b4,行程开关的型号可以是正泰的yblx-wl/ca12,但不仅限于此。
23.以上所述仅为本实用新型的较佳实施例,不能理解为对本技术的限制,凡依本实用新型申请专利范围所做的均等变化与修饰,皆应属本实用新型的涵盖范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。