1.本发明涉及物联网停车技术领域,具体涉及一种基于智慧灯杆供电的智慧路边停车装置及应用方法。
背景技术:
2.随着我国车辆保有量的持续增长,车辆的停放已经成为一个城市交通难题,停车场的车位数量不足以及收费高昂困扰着众多车主,使用部分车流较少道路的路边停车位则成为缓解停车难问题的重要手段之一。
3.但是由于路边停车的停车环境较为复杂,目前路边停车存在管理困难的问题,现有的管理方式为人工管理和互联网管理并存。其中人工管理会产生高额的执法成本,工作人员需要对路边停车的车辆进行登记或收取费用,这个过程费时费力,通常一条可以路边停车的道路需要配备2-4名停车管理员,除此之外,在人工管理的路边停车道路车主无法获取车位信息,很难快速找到空车位。而互联网管理虽然在一定程度上解决了登记、收费和找车位困难的问题,单随之而来的车位管理系统的供电问题和获取车辆信息方式复杂的问题需要解决,目前的智能停车位往往需要自行拉线接入市电保障供电,这样需要铺设新的电力回路,投资高,而且施工复杂,不易实施,而如果使用太阳能供电,遇到连续阴天则有可能无法保证供电造成停车服务出现故障,现有的互联网管理车位的信息获取方式也相当复杂,需要摄像头拍摄车牌图像,然后上传系统来识别车牌号码,以完成停车车辆的信息登记,但采用这种方式采集信息的停车位造价过高,而且技术复杂,不利于智慧路边停车位的推广。
4.如何在使用智慧路边停车装置的基础上,有效解决智能停车位的供电难和信息采集技术复杂的问题,这是智能停车位的设计者需要解决的问题。
技术实现要素:
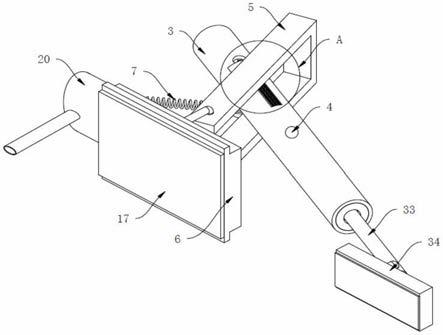
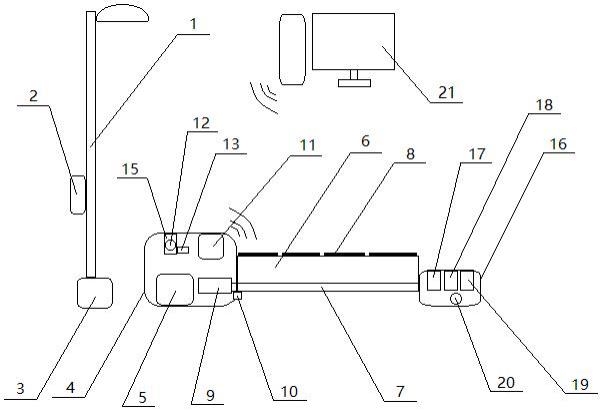
5.为了克服现有智能停车位供电难、信息采集技术复杂等问题,本发明公开了一种基于智能灯杆的智慧路边停车装置,包括:智能灯杆,路灯控制器,路灯供电回路,主机盒,本地控制器,升降挡板,传动轴,防逃逸滚轮,步进电机,压力传感器,通信模块,摄像头,升降电机,装置识别二维码,摄像头罩,探测盒,地磁感应器,微波雷达感应器,红外感应器,蜂鸣器,远程控制平台;所述的智能灯杆安装在路边,智能灯杆上设置有路灯控制器和路灯供电回路;所述的路灯控制器与路灯供电回路相连;所述的路灯供电回路与本地控制器的电力线相连;所述的主机盒安装在道路的路牙处,主机盒上表面印有装置识别二维码,主机盒上侧开有安装孔,用于安装摄像头罩,主机盒侧边设置有安装传动轴的安装孔;所述的本地控制器安装在主机盒内,本地控制器与路灯供电回路电路相连;所述的升降挡板安装在传动轴上;所述的传动轴内部为空心结构,可以允许线缆通过,传动轴安装在在主机盒的一端设置有齿轮;所述的防逃逸滚轮安装在升降挡板外侧边缘;所述的步进电机安装在主机盒内,步进电机与传动轴通过齿轮啮合,步进电机与本地控制器电路相连;所述的压力传感器
与本地控制器电路相连;所述的通信模块安装在主机盒内,通信模块与本地控制器电路相连,通信模块与远程控制平台信息连接;所述的摄像头安装在摄像头罩内,摄像头与本地控制器电路相连;所述的升降电机安装在主机盒内,升降电机的轴与摄像头罩相连,升降电机与本地控制器电路相连;所述的摄像头罩安装在主机盒内,摄像头罩可以被升降电机带动沿轴转动,从而实现探出摄像头和收回摄像头;所述的探测盒安装在离主机盒1.2~1.5m另一端处,探测盒侧边设置有安装传动轴的安装孔,探测盒上设置有探测孔,探测孔使用塑料或玻璃封装,使探测盒内部为封闭状态;所述的地磁感应器安装在探测盒内,地磁感应器与本地控制器电路相连;所述的微波雷达感应器安装在探测盒内,微波雷达感应器与本地控制器电路相连;所述的红外感应器安装在探测盒内,红外感应器与本地控制器电路相连;所述的蜂鸣器安装在探测盒内,蜂鸣器与本地控制器电路相连;所述的远程控制平台包括控制主机和服务器;所述的路灯控制器、路灯供电回路及本地控制器构成智能停车装置的电力回路;所述的本地控制器、通信模块与远程控制平台构成智能停车装置的控制信息回路;所述的压力传感器、摄像头、地磁感应器、微波雷达感应器、红外感应器构成智能停车装置的探测模块。
6.所述的路灯供电回路,其特征在于路灯供电回路包括:路灯箱变、路灯电力导线、路灯光源、路灯控制器及智能停车装置,其中,路灯控制器与智能停车装置并联连接于路灯供电回路中,白天路灯控制器关断路灯光源电源,路灯供电回路只给智能停车系统供电,晚上路灯控制器导通路灯电源,路灯供电回路同时给路灯光源及智能停车系统供电。
7.所述的本地控制器通过信号线与压力传感器、摄像头、地磁感应器、微波雷达感应器、红外感应器信号相连,获取智能停车位附近的车辆停放信息,同时,本地控制器通过电路与通信模块信号相连,本地控制器将获取的车辆停放信息馈送至通信模块,通信模块通过无线传输的方式将该信息上报至远程控制平台的服务器并存储在存储器中,远程控制平台获取停车信息后并通过通讯模块向本地控制器下发控制信息,本地控制器启动步进电机,步进电机通过传动轴旋转,调节升降挡板高度。
8.所述的升降挡板为1.2~1.5m长,20~30cm宽,2~3cm厚的空心金属制硬板,升降挡板长边的一边设置有安装槽,可以固定在传动轴上,与安装槽相对的另一个长边上设置有用于安装防逃逸滚轮的固定轴。
9.所述的防逃逸滚轮是一种中空的塑料厚管,塑料厚管的直径大于滚轮固定轴的直径0.2-1cm,每个滚轮长度20-35cm,管壁厚度0.5-0.8cm,3-4个防逃逸滚轮组成一组安装在升降挡板的滚轮轴上。
10.所述的步进电机通过电路与本地控制器电路相连,步进电机可以接收本地控制器的控制信号,步进电机通过传动轴带动升降挡板转动,实现升降挡板的升降。
11.所述的摄像头,其特征在于摄像头安装在摄像头罩内,拍摄角度为摄像头罩的开口方向,摄像头通过电路与本地控制器电路连接,通过网口与通信模块连接。
12.所述的装置识别二维码,其特征在于装置识别二维码每一台停车装置均有一个唯一的二维码,二维码的信息是由该停车装置的通信模块的id号码信息生成,扫描该二维码可以了解该二维码信息下的停车装置收费、故障等运行情况。
13.所述的压力传感器,其特征在于压力传感器为一压力开关,压力传感器固定安装在升降挡板的一端,当有车辆逃逸强行越过升降挡板时,升降挡板受压,压力传感器开关合
并,本地控制器接收压力传感器信息立即启动摄像头工作,升降电机工作,摄像头罩从主机盒内伸出,对周边车辆进行拍照,并通过通信模块把视频信息发送至远程控制平台,对逃逸车辆进行监控。
14.所述的通信模块通过4g或5g通信与远程控制平台信息联通。
15.所述的摄像头罩为两面开口的六面体结构,摄像头罩有转轴,转轴与升降电机的轴机械连接。
16.一种基于智能灯杆供电的智慧路边停车装置的应用方法包括如下过程:步骤1探测车辆泊车地磁感应器、微波雷达感应器、红外感应器每隔1分钟探测一次智能停车位附近的车辆情况信息,当有车靠近泊车后,地磁感应器探测到有金属物体信号,微波雷达感应器探测与该金属物体距离不大于50cm,红外感应器探测到该近距离金属物体的温度高于环境温度,当连续五分钟同时探测到高于环境温度且距离较近的金属信号,既说明有车辆泊入停车位,本地控制器通过通信模块向远程控制平台发送有车泊入的信号,远程控制平台在其服务器内登记被使用的智能停车位的编号和时间,同时本地控制器启动步进电机,使升降挡板升起,同时启动蜂鸣器,提醒周围人员注意升降挡板正在升起,当升降挡板升起到规定位置,本地控制器关闭步进电机,同时关闭蜂鸣器;步骤2车辆结束泊车缴费离开用户在扫描主机盒上的装置识别二维码后,访问远程控制平台的服务器,远程控制平台调取对应智能停车位的使用时间,计算费用后向用户收费,用户缴费后,远程控制平台通过通信模块向本地控制器发送解锁信号,本地控制器收到信号后启动步进电机,使升降挡板降下,同时启动蜂鸣器,提醒用户升降挡板正在降下,当升降挡板降到水平位置后,本地控制器关闭步进电机,同时关闭蜂鸣器,用户将车辆开出智能停车位后,一次泊车服务完成;步骤3防在泊车辆逃逸当车主没有缴费,而在升降挡板处于升起状态时企图跨越升降挡板逃逸时,首先车轮将接触防逃逸滚轮,防逃逸滚轮可以自由滚动,具有一定防止车辆直接跨越升降挡板的作用,当车主继续逃逸行为,以致升降挡板受压发生位移,压力传感器开关合并,本地控制器接收压力传感器信息立即启动摄像头工作,升降电机工作,摄像头罩从主机盒内伸出,同时蜂鸣器鸣叫,摄像头将对逃逸车辆拍摄时长为1-2分钟的视频,并通过通信模块把视频信息发送至远程控制平台,远程控制平台识别逃逸车辆的车牌号,将其列入失信用户名单中,蜂鸣器在报警1分钟后关闭,本地控制器对升降挡板进行复位,如果复位正常,则该停车装置恢复正常,如果不能正常复位,则本地控制器发出该停车装置故障,并进行故障告警并通过通信模块把故障告警信息发送至远程控制平台,运维人员接警后及时现场维护。
17.本发明的显著效果本发明技术方案首次提出使用智慧路灯为智慧路边停车位供电,解决路边停车装置供电难的问题,同时,使用二维码作为停车管理方式的模式,利用现有路灯电路稍作延伸即可作为停车装置的供电线路,安装便捷,投资和维护成本低,本技术方案还实现了停车读牌和收费分离,即停车收费不需要通过读取车牌进行计时收费,方便快捷;使用二维码管理泊车服务,实现扫码直接解锁,减少了数据获取步骤和难度,降低了管理成本,便于推广应
用。
附图说明
18.图1:为本发明一种基于智慧灯杆供电的智慧路边停车位的主示意图;图2:为本发明一种基于智慧灯杆供电的智慧路边停车位的主机盒俯视剖视图;图3:为本发明一种基于智慧灯杆供电的智慧路边停车位的探测盒俯视剖视图;图4:为本发明一种基于智慧灯杆供电的智慧路边停车位的停车方案实施示意图;图5:为本发明一种基于智慧灯杆供电的智慧路边停车位的信号传输回路示意框图;图6:为本发明一种基于智慧灯杆供电的智慧路边停车位的电力回路示意框图;图中:1、智能灯杆,2、路灯控制器,3、路灯供电回路,4、主机盒,5、本地控制器,6、升降挡板,、7传动轴,8、防逃逸滚轮,9、步进电机,10、压力传感器,11、通信模块,12、摄像头,13、升降电机,14、装置识别二维码,15、摄像头罩,16、探测盒,17、地磁感应器,18、微波雷达感应器,19、红外感应器,20、蜂鸣器,21、远程控制平台。
具体实施方式
19.下面将结合附图1、图2、图3、图4、图5及图6对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只是作为示例,而不能以此来限制本发明的保护范围。
20.为了克服现有智能停车位供电难、信息采集技术复杂等问题,本发明公开了一种基于智能灯杆的智慧路边停车装置,包括:智能灯杆1,路灯控制器2,路灯供电回路3,主机盒4,本地控制器5,升降挡板6,传动轴7,防逃逸滚轮8,步进电机9,压力传感器10,通信模块11,摄像头12,升降电机13,装置识别二维码14,摄像头罩15,探测盒16,地磁感应器17,微波雷达感应器18,红外感应器19,蜂鸣器20,远程控制平台21;所述的智能灯杆1安装在路边,智能灯杆1上设置有路灯控制器2和路灯供电回路3;所述的路灯控制器2与路灯供电回路3相连;所述的路灯供电回路3与本地控制器5的电力线相连;所述的主机盒4安装在道路的路牙处,主机盒4上表面印有装置识别二维码14,主机盒4上侧开有安装孔,用于安装摄像头罩15,主机盒4侧边设置有安装传动轴7的安装孔;所述的本地控制器5安装在主机盒4内,本地控制器5与路灯供电回路3电路相连;所述的升降挡板6安装在传动轴7上;所述的传动轴7内部为空心结构,可以允许线缆通过,传动轴7安装在在主机盒4的一端设置有齿轮;所述的防逃逸滚轮8安装在升降挡板6外侧边缘;所述的步进电机9安装在主机盒4内,步进电机9与传动轴7通过齿轮啮合,步进电机9与本地控制器5电路相连;所述的压力传感器10与本地控制器5电路相连;所述的通信模块11安装在主机盒4内,通信模块11与本地控制器5电路相连,通信模块11与远程控制平台21信息连接;所述的摄像头12安装在摄像头罩15内,摄像头12与本地控制器5电路相连;所述的升降电机13安装在主机盒4内,升降电机13的轴与摄像头罩15相连,升降电机13与本地控制器5电路相连;所述的摄像头罩15安装在主机盒4内,摄像头罩15可以被升降电机13带动沿轴转动,从而实现探出摄像头12和收回摄像头12;所述的探测盒16安装在离主机盒4 1.2~1.5m另一端处,探测盒16侧边设置有安装传动轴7的安装孔,探测盒16上设置有探测孔,探测孔使用塑料或玻璃封装,使探测盒16内部为封闭状态;
所述的地磁感应器17安装在探测盒16内,地磁感应器17与本地控制器5电路相连;所述的微波雷达感应器18安装在探测盒16内,微波雷达感应器18与本地控制器5电路相连;所述的红外感应器19安装在探测盒16内,红外感应器19与本地控制器5电路相连;所述的蜂鸣器20安装在探测盒16内,蜂鸣器20与本地控制器5电路相连;所述的远程控制平台21包括控制主机和服务器;所述的路灯控制器2、路灯供电回路3及本地控制器5构成智能停车装置的电力回路;所述的本地控制器5、通信模块11与远程控制平台21构成智能停车装置的控制信息回路;所述的压力传感器10、摄像头12、地磁感应器17、微波雷达感应器18、红外感应器19构成智能停车装置的探测模块。
21.所述的路灯供电回路3,其特征在于路灯供电回路3包括:路灯箱变、路灯电力导线、路灯光源、路灯控制器及智能停车装置,其中,路灯控制器2与智能停车装置并联连接于路灯供电回路3中,白天路灯控制器2关断路灯光源电源,路灯供电回路3只给智能停车系统供电,晚上路灯控制器2导通路灯电源,路灯供电回路3同时给路灯光源及智能停车系统供电。
22.所述的本地控制器5通过信号线与压力传感器10、摄像头12、地磁感应器17、微波雷达感应器18、红外感应器19信号相连,获取智能停车位附近的车辆停放信息,同时,本地控制器5通过电路与通信模块11信号相连,本地控制器5将获取的车辆停放信息馈送至通信模块11,通信模块11通过无线传输的方式将该信息上报至远程控制平台21的服务器并存储在存储器中,远程控制平台21获取停车信息后并通过通讯模块11向本地控制器5下发控制信息,本地控制器5启动步进电机9,步进电机9通过传动轴7旋转,调节升降挡板6高度。
23.所述的升降挡板6为1.2~1.5m长,20~30cm宽,2~3cm厚的空心金属制硬板,升降挡板6长边的一边设置有安装槽,可以固定在传动轴7上,与安装槽相对的另一个长边上设置有用于安装防逃逸滚轮8的固定轴。
24.所述的防逃逸滚轮8是一种中空的塑料厚管,塑料厚管的直径大于滚轮固定轴的直径0.2-1cm,每个滚轮长度20-35cm,管壁厚度0.5-0.8cm,3-4个防逃逸滚轮8组成一组安装在升降挡板6的滚轮轴上。
25.所述的步进电机9通过电路与本地控制器5电路相连,步进电机9可以接收本地控制器5的控制信号,步进电机9通过传动轴7带动升降挡板6转动,实现升降挡板6的升降。
26.所述的摄像头12,其特征在于摄像头12安装在摄像头罩15内,拍摄角度为摄像头罩15的开口方向,摄像头12通过电路与本地控制器5电路连接,通过网口与通信模块11连接。
27.所述的装置识别二维码14,其特征在于装置识别二维码14每一台停车装置均有一个唯一的二维码,二维码的信息是由该停车装置的通信模块11的id号码信息生成,扫描该二维码可以了解该二维码信息下的停车装置收费、故障等运行情况。
28.所述的压力传感器10,其特征在于压力传感器10为一压力开关,压力传感器10固定安装在升降挡板6的一端,当有车辆逃逸强行越过升降挡板6时,升降挡板6受压,压力传感器10开关合并,本地控制器5接收压力传感器10信息立即启动摄像头12工作,升降电机13工作,摄像头罩15从主机盒4内伸出,对周边车辆进行拍照,并通过通信模块11把视频信息发送至远程控制平台21,对逃逸车辆进行监控。
29.所述的通信模块11通过4g或5g通信与远程控制平台21信息联通。
30.所述的摄像头罩15为两面开口的六面体结构,摄像头罩15有转轴,转轴与升降电机13的轴机械连接。
31.一种基于智能灯杆供电的智慧路边停车装置的应用方法包括如下过程:步骤1 探测车辆泊车地磁感应器17、微波雷达感应器18、红外感应器19每隔1分钟探测一次智能停车位附近的车辆情况信息,当有车靠近泊车后,地磁感应器17探测到有金属物体信号,微波雷达感应器18探测与该金属物体距离不大于50cm,红外感应器19探测到该近距离金属物体的温度高于环境温度,当连续五分钟同时探测到高于环境温度且距离较近的金属信号,既说明有车辆泊入停车位,本地控制器5通过通信模块11向远程控制平台21发送有车泊入的信号,远程控制平台21在其服务器内登记被使用的智能停车位的编号和时间,同时本地控制器5启动步进电机9,使升降挡板6升起,同时启动蜂鸣器20,提醒周围人员注意升降挡板6正在升起,当升降挡板6升起到规定位置,本地控制器5关闭步进电机9,同时关闭蜂鸣器20;步骤2 车辆结束泊车缴费离开用户在扫描主机盒4上的装置识别二维码14后,访问远程控制平台21的服务器,远程控制平台21调取对应智能停车位的使用时间,计算费用后向用户收费,用户缴费后,远程控制平台21通过通信模块11向本地控制器5发送解锁信号,本地控制器5收到信号后启动步进电机9,使升降挡板6降下,同时启动蜂鸣器20,提醒用户升降挡板6正在降下,当升降挡板6降到水平位置后,本地控制器5关闭步进电机9,同时关闭蜂鸣器20,用户将车辆开出智能停车位后,一次泊车服务完成;步骤3 防在泊车辆逃逸当车主没有缴费,而在升降挡板6处于升起状态时企图跨越升降挡板逃逸时,首先车轮将接触防逃逸滚轮8,防逃逸滚轮8可以自由滚动,具有一定防止车辆直接跨越升降挡板6的作用,当车主继续逃逸行为,以致升降挡板6受压发生位移,压力传感器10开关合并,本地控制器5接收压力传感器10信息立即启动摄像头12工作,升降电机13工作,摄像头罩15从主机盒4内伸出,同时蜂鸣器20鸣叫,摄像头12将对逃逸车辆拍摄时长为1-2分钟的视频,并通过通信模块11把视频信息发送至远程控制平台21,远程控制平台21识别逃逸车辆的车牌号,将其列入失信用户名单中,蜂鸣器20在报警1分钟后关闭,本地控制器5对升降挡板6进行复位,如果复位正常,则该停车装置恢复正常,如果不能正常复位,则本地控制器5发出该停车装置故障,并进行故障告警并通过通信模块11把故障告警信息发送至远程控制平台21,运维人员接警后及时现场维护。
具体实施例
32.本发明的路灯控制器2采用常州启新照明科技有限公司的qx-we-ma-4g10,该路灯控制器有rs845通信接口,同时也能够满足4g远程管控路灯的要求,本地控制器5采用stm32f103ret6型,该芯片模组基于arm高密度性能线32位mcu,具有265-512位闪存,usb,can,11个定时器,3个adc,13个通信接口,可以满足本地控制其的技术需求,压力传感器10采用深圳市宏英微科技有限公司的mp3v5050gp力敏压力传感器,通信模块11采用深圳市大鑫浪电子科技有限公司的sim7600ce-m 4g通信芯片,支持b34*/b38/b39/b40/b41/b1等频段,而且支持多种usb驱动系统,能最大限度满足通信模块11的产品需求,地磁感应器17采
用四川锦睿智诚科技有限公司的jrzc系列地磁传感器,微波雷达感应器18采用深圳市佰誉达科技有限公司的k-ld7 rfbeam微波雷达感应器传感器,该雷达传感器包括具有非对称波束的3
×
4贴片天线雷达前端和功能强大的信号处理单元,具有四个可配置的数字输出,用于信号检测信息,红外感应器19采用深圳市帕特轮电子有限公司的dps101b热释红外传感器,远程控制平台21把智能停车位的各项运行参数通过监视器以图文的形式显示出来,对智能停车位的运行进行远程监控。
33.本发明的说明书中,说明了大量具体细节。然而,能够理解,本发明的实施例可以在没有这些具体细节的情况下实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。
34.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然 可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。