1.本发明涉及城市规划模型技术领域,尤其涉及城建专业城市规划模型装置。
背景技术:
2.城市模型是分析研究区域与城市社会,经济,科技与生态问题的模型,城市模型的结构包括城市系统的边界,任务是尽可能反映出城市系统发展进程的各个方面,城市系统由三个子系统组成,产业企业活动部门,住宅和人口,外部环境能够作用于城市系统,但影响并不显著,城市建设规划管理部门越来越借助模型作为审批规划或设计方案的依据之一,而更多的时候,房地产业主,开发商在做形象宣传及正式销售阶段,也不惜工本要求设计者提供模型,这样做不仅是为了能看到设计意图的直观效果,更重要的是利用模型作为招商和商业广告的有效载体。
3.城市规划不可避免的会涉及到建筑、商业、景观等业态,规划模型就是要展现出城市规划的整体,包括园林景观、交通网络等等,只有精确的比例才能够真实的反映出该项目的实际情况,反映出城市布局及未来发展的合理性,传统对模型清理的方式是由工作人员进行直接擦拭,然而一些模型多是固定在支撑面上,对其模型之间清理较为不便,则利用工具容易损坏模型,擦拭起来过于麻烦,所以不利于实际使用;其次,一些模型多是固定在支撑面上,若是规划中需要进行移动时,较为不便,若是直接放置则稳定性不足。
4.因此,我们设计了城建专业城市规划模型装置来解决以上问题。
技术实现要素:
5.本发明的目的是为了解决现有技术中存在的缺点,而提出的城建专业城市规划模型装置,其不仅方便对底座进行移动,且可以对移动后的底座进行稳定的支撑,同时,可以对模型件进行移动以及清理,也便于对磁板上表面进行清理,同时,可以对模型件进行防尘保护。
6.为了实现上述目的,本发明采用了如下技术方案:
7.城建专业城市规划模型装置,包括底座,所述底座的底部安装有四个安装架,四个所述安装架的底部均安装有滚轮,且所述底座的外壁设有四个支撑定位机构,所述底座的上端固定连接有矩形框,所述底座上固定连接有位于矩形框内的磁板,所述底座的前侧设有侧槽,所述侧槽内安装有驱动磁板移动的驱动机构,所述磁板上设有多个磁吸块,多个所述磁吸块的上端均安装有可以拆卸的模型件,所述磁板的上端安装有两个电动伸缩杆,两个所述电动伸缩杆的输出端共同固定连接有玻璃挡板,所述矩形框的侧壁设有控制电动伸缩杆工作的控制机构。
8.优选地,所述支撑定位机构包括固定在底座侧壁的固定柱,所述固定柱的底部设有螺纹槽,所述螺纹槽内螺纹连接有支撑螺杆,所述支撑螺杆的底部固定连接有连接柱,所述连接柱上固定连接有把手,所述连接柱的底部设有与其转动连接的支撑脚。
9.优选地,所述驱动机构包括安装在侧槽内底部的电机,所述电机为伺服电机,且所
述电机的输出端固定连接有第一齿轮,所述侧槽的内底部转动连接有圆杆,所述圆杆上安装有第二齿轮,所述第一齿轮和第二齿轮相啮合,所述圆杆的上端固定连接有与其共轴设置的升降螺杆,所述升降螺杆的外部套设有与其配合连接的螺纹筒,所述螺纹筒贯穿底座的上端侧壁并与其滑动连接,所述螺纹筒的上端与磁板的底部固定连接。
10.优选地,所述磁吸块为磁块,且所述磁吸块与磁板相抵面磁极相反。
11.优选地,所述磁吸块的上端固定连接有安装块,所述安装块的上端固定连接有凸块,所述模型件的底部设有安装槽,所述凸块安装在安装槽内,且所述模型件与安装块的上端相抵。
12.优选地,所述控制机构包括设置在矩形框侧壁的滑动槽,所述滑动槽绝缘安装有第一电触片,所述滑动槽内固定连接有固定环,所述固定环的内环呈矩形形状,所述固定环内滑动连接有矩形杆,所述矩形杆上绝缘安装有第二电触片,所述矩形杆上固定安装有套环,所述套环与固定环之间固定连接有弹簧,所述弹簧套在矩形杆的外部,且所述弹簧不与矩形杆相抵,所述矩形杆远离第二电触片的一端固定连接有挤压块。
13.优选地,所述第一电触片、第二电触片与两个电动伸缩杆相连接,且两个所述电动伸缩杆电性串联。
14.优选地,所述挤压块远离矩形杆的一端呈半球状设置。
15.本发明与现有技术相比,其有益效果为:
16.1、推动底座,在滚轮的作用下,可以实现底座和模型件的移动,移动至所需位置时,工作人员可以手动转动把手,把手转动带动支撑螺杆转动,从而可以实现支撑螺杆和支撑脚向下移动,直至支撑脚与地面相抵,从而可以对底座进行稳定的支撑。
17.2、工作人员可以开启电机,电机工作带动第一齿轮转动,第一齿轮转动带动第二齿轮转动,从而可以实现圆杆、升降螺杆转动,由于磁板在矩形框内无法转动,因此升降螺杆转动可以实现螺纹筒和磁板向上移动,从而可以实现模型件和玻璃挡板向上移动,可以使得模型件位于矩形框的上端方便观看,当磁板向上移动与挤压块相抵时,磁板会驱动挤压块移动,从而实现挤压块、矩形杆、套环和第二电触片移动,第二电触片移动与第一电触片相抵,此时电动伸缩杆通电,电动伸缩杆工作可以驱动玻璃挡板向上移动,从而更加方便进行规划研究工作。
18.3、由于磁吸块与磁板之间通过磁吸连接,两者稳定性足且不自行移动,研究过程中若是需要对模型件进行移动时,工作人员可以手动移动磁吸块,从而可以对模型件的位置进行布置,操作简单且方便快捷,移动后的稳定性足。
19.4、若是对模型件和磁板进行清理时,工作人员可以直接上移模型件,模型件与凸块分离,如此可以对模型件进行彻底清理,也可以将磁吸块取下,如此可以对磁板上端进行清理,操作简单方便。
20.5、不再使用时,工作人员启动电机使其反转,则磁板不与挤压块相抵,电动伸缩杆断电复位,最终玻璃挡板复位位于矩形框内,从而可以对矩形框的上端进行封堵,从而可以避免灰尘落在模型件上,且可以对模型件进行保护。
21.综上所述,本发明不仅方便对底座进行移动,且可以对移动后的底座进行稳定的支撑,同时,可以对模型件进行移动以及清理,也便于对磁板上表面进行清理,同时,可以对模型件进行防尘保护。
附图说明
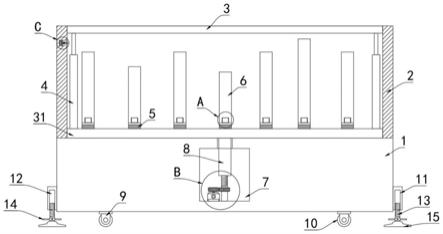
22.图1为本发明提出的城建专业城市规划模型装置的结构示意图;
23.图2为本发明提出的城建专业城市规划模型装置中a处的结构示意图;
24.图3为本发明提出的城建专业城市规划模型装置中b处的结构示意图;
25.图4为本发明提出的城建专业城市规划模型装置中c处的结构示意图。
26.图中:1底座、2矩形框、3玻璃挡板、4电动伸缩杆、5磁吸块、6模型件、7侧槽、8螺纹筒、9安装架、10滚轮、11固定柱、12螺纹槽、13支撑螺杆、14把手、15支撑脚、16安装块、17安装槽、18凸块、19电机、20第一齿轮、21圆杆、22第二齿轮、23升降螺杆、24第一电触片、25第二电触片、26固定环、27弹簧、28套环、29挤压块、30矩形杆、31磁板、32滑动槽。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
28.参照图1-4,城建专业城市规划模型装置,包括底座1,底座1的底部安装有四个安装架9,四个安装架9的底部均安装有滚轮10,且底座1的外壁设有四个支撑定位机构,支撑定位机构包括固定在底座1侧壁的固定柱11,固定柱11的底部设有螺纹槽12,螺纹槽12内螺纹连接有支撑螺杆13,支撑螺杆13的底部固定连接有连接柱,连接柱上固定连接有把手14,连接柱的底部设有与其转动连接的支撑脚15。
29.底座1的上端固定连接有矩形框2,底座1上固定连接有位于矩形框2内的磁板31,磁板31为钢板和磁性材料组成,磁性材料安装在钢板上。
30.底座1的前侧设有侧槽7,侧槽7内安装有驱动磁板31移动的驱动机构,驱动机构包括安装在侧槽7内底部的电机19,电机19为伺服电机,且电机19的输出端固定连接有第一齿轮20,侧槽7的内底部转动连接有圆杆21,圆杆21上安装有第二齿轮22,第一齿轮20和第二齿轮22相啮合,圆杆21的上端固定连接有与其共轴设置的升降螺杆23,升降螺杆23的外部套设有与其配合连接的螺纹筒8,螺纹筒8贯穿底座1的上端侧壁并与其滑动连接,螺纹筒8的上端与磁板31的底部固定连接。
31.磁板31上设有多个磁吸块5,磁吸块5为磁块,且磁吸块5与磁板31相抵面磁极相反;多个磁吸块5的上端均安装有可以拆卸的模型件6,磁吸块5的上端固定连接有安装块16,安装块16的上端固定连接有凸块18,模型件6的底部设有安装槽17,凸块18安装在安装槽17内,且模型件6与安装块16的上端相抵。
32.磁板31的上端安装有两个电动伸缩杆4,第一电触片24、第二电触片25与两个电动伸缩杆4相连接,且两个电动伸缩杆4电性串联;两个电动伸缩杆4的输出端共同固定连接有玻璃挡板3,矩形框2的侧壁设有控制电动伸缩杆4工作的控制机构,控制机构包括设置在矩形框2侧壁的滑动槽32,滑动槽32绝缘安装有第一电触片24,滑动槽32内固定连接有固定环26,固定环26的内环呈矩形形状,固定环26内滑动连接有矩形杆30,矩形杆30上绝缘安装有第二电触片25,矩形杆30上固定安装有套环28,套环28与固定环26之间固定连接有弹簧27,弹簧27套在矩形杆30的外部,且弹簧27不与矩形杆30相抵,矩形杆30远离第二电触片25的一端固定连接有挤压块29,挤压块29远离矩形杆30的一端呈半球状设置。
33.本发明使用时,工作人员手动推动底座1,在滚轮10的作用下,可以实现底座1和模
型件6的移动,移动至所需位置时,工作人员可以手动转动把手14,把手14转动带动支撑螺杆13转动,从而可以实现支撑螺杆13和支撑脚15向下移动,直至支撑脚15与地面相抵,从而可以对底座1进行稳定的支撑;
34.使用时,工作人员可以开启电机19,电机19工作带动第一齿轮20转动,第一齿轮20转动带动第二齿轮22转动,从而可以实现圆杆21、升降螺杆23转动,由于磁板31在矩形框2内无法转动,因此升降螺杆23转动可以实现螺纹筒8和磁板31向上移动,从而可以实现模型件6和玻璃挡板3向上移动,可以使得模型件6位于矩形框2的上端方便观看;
35.当磁板31向上移动与挤压块29相抵时,磁板31会驱动挤压块29移动,从而实现挤压块29、矩形杆30、套环28和第二电触片25移动,第二电触片25移动与第一电触片24相抵,此时电动伸缩杆4通电,电动伸缩杆4工作可以驱动玻璃挡板3向上移动,从而更加方便进行规划研究工作;
36.由于磁吸块5与磁板31之间通过磁吸连接,两者稳定性足且不自行移动,研究过程中若是需要对模型件6进行移动时,工作人员可以手动移动磁吸块5,从而可以对模型件6的位置进行布置,操作简单且方便快捷,移动后的稳定性足;
37.同理,若是对模型件6和磁板31进行清理时,工作人员可以直接上移模型件6,模型件6与凸块18分离,如此可以对模型件6进行彻底清理,也可以将磁吸块5取下,如此可以对磁板31上端进行清理,操作简单方便;
38.若是不再使用时,工作人员启动电机19使其反转,则磁板31不与挤压块29相抵,电动伸缩杆4断电复位,最终玻璃挡板3复位位于矩形框2内,从而可以对矩形框2的上端进行封堵,从而可以避免灰尘落在模型件6上,且可以对模型件6进行保护。
39.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
