1.本发明涉及医疗器械技术领域,特别涉及助行器的转向助力控制方法、转向助力控制装置及存储器。
背景技术:
2.助行器是可以通过器械的支撑,让腿脚不方便的老人、病人、甚至失去行走能力的人能够像正常人一样外出行走。而使用者在行走过程中不可避免的需要进行转向等操作。
3.目前助行器的转向是完全通过使用者施力实现,而转向时阻力会比直线推行时更大,而助行器的使用者一般又都为力气较小的特殊人群,因此在转向阻力增大时会造成不便,影响使用者的行进。
技术实现要素:
4.本发明提供一种助行器的转向助力控制方法、转向助力控制装置及存储器,以解决现有技术中使用者在使用助行器转向时阻力增大造成不便的技术问题。
5.为解决上述技术问题,本发明采用的一个技术方案是提供一种助行器的转向助力控制方法,所述助行器包括主体架及分别设置于所述主体架底部的左轮和右轮,所述转向助力控制方法包括:
6.获取所述左轮的第一移动速度、所述右轮的第二移动速度;
7.判断所述左轮和/或所述右轮是否处于转向状态;
8.若所述左轮和/或所述右轮处于转向状态,则根据所述第一移动速度、所述第二移动速度计算转向角度预估值或所述第一移动速度和所述右轮的第二移动速度的速度差值;
9.根据所述转向角度预估值或所述速度差值得到转向助力补偿值,并根据所述转向助力补偿值对所述左轮和/或所述右轮进行助力补偿。
10.在一具体实施例中,所述判断所述左轮和/或所述右轮是否处于转向状态的方法包括:
11.获取所述左轮的第一移动方向、所述右轮的第二移动方向;
12.判断所述第一移动方向和所述第二移动方向是否都为向前或向后,且所述第一移动速度和所述第二移动速度的差值是否小于阈值;
13.若所述第一移动方向和所述第二移动方向都为向前或向后,且所述第一移动速度和所述第二移动速度的差值小于阈值,则所述左轮和/或右轮为直行状态;
14.否则所述左轮和/或所述右轮为转向状态。
15.在一具体实施例中,所述判断所述左轮和/或所述右轮处于转向状态后还包括:
16.根据所述第一移动速度、所述第一移动方向、所述第二移动速度和所述第二移动方向判断所述助行器的转向运行状态。
17.在一具体实施例中,所述根据所述第一移动速度、所述第一移动方向、所述第二移动速度和所述第二移动方向判断所述助行器的转向运行状态的方法包括:
18.若所述第二移动方向为向前,且所述第二移动速度的绝对值大于或等于所述第一移动速度的绝对值,则所述助行器为向前左转;
19.若所述第一移动方向为向前,且所述第一移动速度的绝对值大于或等于所述第二移动速度的绝对值,则所述助行器为向前右转;
20.若所述第一移动方向为向后,且所述第一移动速度的绝对值大于所述第二移动速度的绝对值,则所述助行器为向后左转;
21.若所述第二移动方向为向后,且所述第二移动速度的绝对值大于所述第一移动速度的绝对值,则所述助行器为向后右转。
22.在一具体实施例中,所述计算所述转向角度预估值的方法包括:
23.若所述助行器为向前左转,则所述转向角度预估值α=-45
°
v1/v2*45
°
,其中v1为第一移动速度,v2为第二移动速度;
24.若所述助行器为向前右转,则所述转向角度预估值α=45
°‑
v2/v1*45
°
;
25.若所述助行器为向后左转,则所述转向角度预估值α=-45
°‑
v2/v1*45
°
;
26.若所述助行器为向后右转,则所述转向角度预估值α=45
°‑
v1/v2*45
°
。
27.在一具体实施例中,所述助力补偿值包括第一助力补偿值和/或第二助力补偿值,所述根据所述转向角度预估值计算转向助力补偿值的方法包括:
28.根据所述转向角度预估值、所述第一移动速度计算第一助力补偿值;和/或
29.根据所述转向角度预估值、所述第二移动速度计算第二助力补偿值。
30.在一具体实施例中,所述助力补偿值包括第一助力补偿值和/或第二助力补偿值,若所述助行器为向前左转或向后右转,则所述第一助力补偿值与所述第一移动速度、所述转向角度预估值成反比关系,所述第二助力补偿值与所述第二移动速度、所述转向角度预估值成正比关系;
31.若所述助行器为向前右转或向后左转,则所述第一助力补偿值与所述第一移动速度、所述转向角度预估值成正比关系,所述第二助力补偿值与所述第二移动速度、所述转向角度预估值成反比关系。
32.在一具体实施例中,所述助力补偿值包括第一助力补偿值和/或第二助力补偿值,所述第一助力补偿值p1=k*(|α|*v1/m1)*(|α|/90 1),其中k为不同档位下的比例参数,α为转向角度预估值的绝对值,v1为所述第一移动速度,m1为左轮速度调节比例,所述第二助力补偿值p2=k*(|α|*v2/m2)*(|α|/90 1),其中,v2为所述第二移动速度,m2为右轮速度调节比例。
33.在一具体实施例中,所述助行器还包括驱动器,所述驱动器用于驱动所述左轮和/或右轮,根据所述转向助力补偿值对所述左轮和/或所述右轮进行助力补偿的方法包括:
34.若所述助行器为向前左转或向后右转,则助力补偿后的所述驱动器对所述左轮的扭力值pl1=pl0-p1,其中,pl0为助力补偿前的所述驱动器对所述左轮的扭力值,助力补偿后的所述驱动器对所述右轮的扭力值pr1=pr0 p2,其中,pr0为助力补偿前的所述驱动器对所述右轮的扭力值;
35.若所述助行器为向前右转或向后左转,则助力补偿后的所述驱动器对所述左轮的扭力值pl1=pl0 p1,助力补偿后的所述驱动器对所述右轮的扭力值pr1=pr0-p2。
36.在一具体实施例中,k为0.1至1,m1为1至100,m2为1至100。
37.在一具体实施例中,所述助行器还包括驱动器,所述驱动器用于驱动所述左轮和/或右轮,所述助力补偿值包括第一助力补偿值和/或第二助力补偿值,所述根据所述速度差值得到所述转向助力补偿值,并根据所述转向助力补偿值对所述左轮和/或所述右轮进行助力补偿的方法包括:
38.所述第一助力补偿值p1=k*dv*n1,其中k为不同档位下的比例参数,dv为所述速度差值,n1为所述左轮的差速补偿比例,所述第二助力补偿值p2=k*dv*n2,其中n2为所述右轮的差速补偿比例;
39.若所述助行器为向前左转或向后右转,则助力补偿后的所述驱动器对所述左轮的扭力值pl1=pl0-p1,其中,pl0为助力补偿前的所述驱动器对所述左轮的扭力值,助力补偿后的所述驱动器对所述右轮的扭力值pr1=pr0 p2,其中,pr0为助力补偿前的所述驱动器对所述右轮的扭力值;
40.若所述助行器为向前右转或向后左转,则助力补偿后的所述驱动器对所述左轮的扭力值pl1=pl0 p1,助力补偿后的所述驱动器对所述右轮的扭力值pr1=pr0-p2。
41.为解决上述技术问题,本发明采用的另一个技术方案是提供一种助行器的转向助力控制装置,所述助行器包括主体架及分别设置于所述主体架底部的左轮和右轮,所述转向助力控制装置包括:
42.处理器,所述处理器用于获取所述左轮的第一移动速度、所述右轮的第二移动速度,判断所述左轮和/或所述右轮是否处于转向状态,若所述左轮和/或所述右轮处于转向状态,则根据所述第一移动速度、所述第二移动速度计算转向角度预估值,根据所述转向角度预估值或所述速度差值得到转向助力补偿值;
43.控制器,所述控制器用于根据所述转向助力补偿值对所述左轮和/或所述右轮进行助力补偿。
44.为解决上述技术问题,本发明采用的另一个技术方案是提供一种存储器,存储有程序数据,所述程序数据能够被执行以实现如上述的转向助力控制方法。
45.本发明助行器的转向助力控制方法包括获取左轮的第一移动速度、右轮的第二移动速度,判断左轮和/或右轮是否处于转向状态,若左轮和/或右轮处于转向状态,则根据第一移动速度、第二移动速度计算转向角度预估值或第一移动速度和右轮的第二移动速度的速度差值,根据转向角度预估值或速度差值得到转向助力补偿值,并根据转向助力补偿值对左轮和/或右轮进行助力补偿,通过在助行器转向时对助行器的左轮和/或右轮进行助力补偿,能够使得使用者在推动助行器转向时更加省力,使得力气较小的使用者在使用助行器时更加便捷,减小转向对助行器的行进速度的影响,保证助行器的正常行进,避免因转向阻力增大造成突然的停顿,能够提高安全性。
附图说明
46.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,其中:
47.图1是本发明助行器的转向助力控制方法一实施例流程示意图;
48.图2是本发明助行器的转向助力控制方法另一实施例流程示意图;
49.图3是本发明助行器的转向助力控制方法另一实施例中部分步骤的流程示意图;
50.图4是本发明助行器的转向助力控制方法另一实施例中部分步骤的流程示意图;
51.图5是本发明助行器的转向助力控制方法另一实施例中部分步骤的流程示意图;
52.图6是本发明助行器的转向助力控制方法另一实施例流程示意图;
53.图7是本发明助行器的转向助力控制方法另一实施例中部分步骤的流程示意图;
54.图8是本发明助行器实施例的结构示意图;
55.图9是本发明助行器实施例中转向助力控制装置的结构示意图;
56.图10是本发明存储器的结构示意图。
具体实施方式
57.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,均属于本发明保护的范围。
58.本技术中的术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。而术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
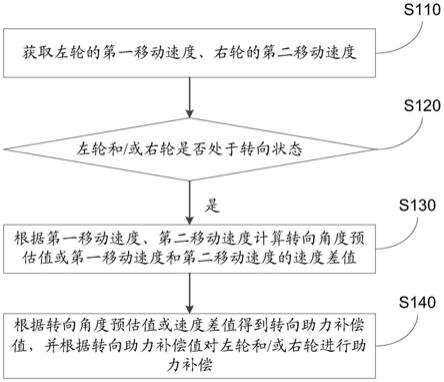
59.参见图1,本发明助行器包括主体架及分别设置于主体架底部的左轮和右轮,助行器的转向助力控制方法一实施例包括:
60.s110、获取左轮的第一移动速度、右轮的第二移动速度。
61.在本实施例中,可以通过左轮和/或右轮在单位时间内转动的圈数、转速等获取左轮的第一移动速度、右轮的第二移动速度。
62.s120、判断左轮和/或右轮是否处于转向状态。
63.在本实施例中,可以根据第一移动速度和/或第二移动速度来判断左轮和/或右轮是否处于转向状态。
64.在其他实施例中,也可以通过对驱动左轮和/或右轮的驱动器的驱动力、驱动方向等判断左轮和/或右轮是否处于转向状态。还可以通过对左轮和/或右轮的图像检测等方式判断左轮和/或右轮是否处于转向状态,在此不做限制。
65.s130、若左轮和/或右轮处于转向状态,则根据第一移动速度、第二移动速度计算转向角度预估值或第一移动速度和第二移动速度的速度差值。
66.s140、根据转向角度预估值或速度差值得到转向助力补偿值,并根据转向助力补偿值对左轮和/或右轮进行助力补偿。
67.本实施例通过在助行器转向时对助行器的左轮和/或右轮进行助力补偿,能够使得使用者在推动助行器转向时更加省力,使得力气较小的使用者在使用助行器时更加便捷,减小转向对助行器的行进速度的影响,保证助行器的正常行进,避免因转向阻力增大造成突然的停顿,能够提高安全性。
68.在其他实施例中,在获取左轮的第一移动速度、右轮的第二移动速度之前还可以包括:
69.判断是否需要对左轮和/或右轮进行转向助力补偿;
70.若需要对左轮和/或右轮进行转向助力补偿,则获取左轮的第一移动速度、右轮的第二移动速度;
71.否则不做操作。
72.其中,可以根据主体架的载重和/或路面情况判断是否需要对左轮和/或右轮进行转向助力补偿。例如,获取主体架的载重,判断主体架的载重是否超过重量阈值(例如20kg、25kg等),若主体架的载重超过重量阈值,则判断为需要对左轮和/或右轮进行转向助力补偿,否则不需要对左轮和/或右轮进行转向助力补偿。又例如,获取左轮和/或右轮与路面之间的摩擦力,判断摩擦力是否超过阻力阈值,若左轮和/或右轮与路面之间的的摩擦力超过阻力阈值,则判断为需要对左轮和/或右轮进行转向助力补偿,否则不需要对左轮和/或右轮进行转向助力补偿。又例如,判断助行器是否处于上坡状态,且斜坡角度是否大于或等于角度阈值,若助行器处于上坡状态,且斜坡角度大于或等于角度阈值,则判断为需要对左轮和/或右轮进行转向助力补偿,否则不需要对左轮和/或右轮进行转向助力补偿。
73.参见图2,本发明助行器包括主体架及分别设置于主体架底部的左轮和右轮,助行器的转向助力控制方法另一实施例包括:
74.s210、获取左轮的第一移动速度、右轮的第二移动速度。
75.在本实施例中,获取第一移动速度和第二移动速度的方法参见上述助行器的转向助力控制方法实施例,在此不再赘述。
76.s220、判断左轮和/或右轮是否处于转向状态。
77.在本实施例中,判断左轮和/或右轮是否处于转向状态的方法具体可以包括:
78.s221、获取左轮的第一移动方向、右轮的第二移动方向。
79.在本实施例中,将左轮、右轮的移动方向分为前、后两个方向,可以通过检测左轮、右轮的转动方向来判断左轮、右轮的移动方向,例如,在左视状态下,若左轮、右轮的转动方向为顺时针方向,则左轮、右轮为移动方向为向后,若左轮、右轮的转动方向为逆时针方向,则左轮、右轮为移动方向为向前。
80.s222、判断第一移动方向和第二移动方向是否都为向前或向后,且第一移动速度和第二移动速度的差值是否小于阈值;
81.若第一移动方向和第二移动方向都为向前或向后,且第一移动速度和第二移动速度的差值小于阈值,则左轮和/或右轮为直行状态;
82.否则左轮和/或右轮为转向状态。
83.由于路况、助行器本身的精度问题等,使得助行器在直行过程中,第一移动速度和第二移动速度无法始终保持一致,通过设置阈值使得第一移动速度和第二移动速度的差值在误差范围内都判断为助行器为直行状态,能够减少误判的概率。
84.在本实施例中,阈值可以小于或等于5rad/min,例如2rad/min、3rad/min或5rad/min等。
85.s230、若左轮和/或右轮处于转向状态,则根据第一移动速度、第一移动方向、第二移动速度和第二移动方向判断助行器的转向运行状态。
86.参见图3,在本实施例中,判断助行器的转向运行状态的方法具体可以包括:
87.s231、若第二移动方向为向前,且第二移动速度的绝对值大于或等于第一移动速度的绝对值,则助行器为向前左转。
88.s232、若第一移动方向为向前,且第一移动速度的绝对值大于或等于第二移动速度的绝对值,则助行器为向前右转。
89.s233、若第一移动方向为向后,且第一移动速度的绝对值大于第二移动速度的绝对值,则助行器为向后左转。
90.s234、若第二移动方向为向后,且第二移动速度的绝对值大于第一移动速度的绝对值,则助行器为向后右转。
91.将助行器的运行状态分为直行、向前左转、向前右转、向后左转以及向后右转,通过状态的区分能够使得后续转向角度预估值、转向助力补偿值的获取更加精准。
92.复参见图2,s240、若左轮和/或右轮不处于转向状态,则不做操作。
93.s250、根据第一移动速度、第二移动速度计算转向角度预估值。
94.参见图4,在本实施例中,定义左轮、右轮的径向与前后方向平行时,左轮、右轮的转向角度为0,左轮、右轮向左转动至轴向与前后方向垂直时,左轮、右轮的转向角度为-90
°
,左轮、右轮向右转动至轴向与前后方向垂直时,左轮、右轮的转向角度为90
°
,计算转向角度预估值的方法具体可以包括:
95.s251、若助行器为向前左转,则转向角度预估值α=-45
°
v1/v2*45
°
,其中v1为第一移动速度,v2为第二移动速度。
96.s252、若助行器为向前右转,则转向角度预估值α=45
°‑
v2/v1*45
°
。
97.s253、若助行器为向后左转,则转向角度预估值α=-45
°‑
v2/v1*45
°
。
98.s254、若助行器为向后右转,则转向角度预估值α=45
°‑
v1/v2*45
°
。
99.复参见图2,s260、根据转向角度预估值得到转向助力补偿值,并根据转向助力补偿值对左轮和/或右轮进行助力补偿。
100.参见图5,在本实施例中,助力补偿值包括第一助力补偿值和/或第二助力补偿值,根据转向角度预估值计算转向助力补偿值的方法具体可以包括:
101.s261、根据转向角度预估值、第一移动速度计算第一助力补偿值,具体的,第一助力补偿值p1=k*(|α|*v1/m1)*(|α|/90 1),其中,k为不同档位下的比例参数,|α|为转向角度预估值的绝对值,v1为第一移动速度,m1为左轮速度调节比例。和/或
102.s262、根据转向角度预估值、第二移动速度计算第二助力补偿值,具体的,第二助力补偿值p2=k*(|α|*v2/m2)*(|α|/90 1),其中,v2为第二移动速度,m2为右轮速度调节比例。
103.在本实施例中,可以根据使用者的需要人为或自动设定助行器的速度档位,每一档位对应一个k的值,k可以为0.1至1,例如0.1、0.6或1等。在其他实施例中,k也可以为固定值,例如0.5、0.8或1等。
104.在本实施例中,左轮速度调节比例可以通过人为设定或自动设定,m1可以为1至100,例如1、55或100等。
105.在本实施例中,右轮速度调节比例可以通过人为设定或自动设定,m2可以为1至100,例如1、55或100等。
106.在本实施例中,助行器还包括驱动器,驱动器用于驱动左轮和/或右轮,若助行器为向前左转或向后右转,则第一助力补偿值与第一移动速度、转向角度预估值成反比关系,第二助力补偿值与第二移动速度、转向角度预估值成正比关系,即需要减小驱动器对左轮的扭力,增加驱动器对右轮的扭力,以帮助助行器转向,使得转向更加省力;同理,若助行器为向前右转或向后左转,则第一助力补偿值与第一移动速度、转向角度预估值成正比关系,第二助力补偿值与第二移动速度、转向角度预估值成反比关系,即需要增加驱动器对左轮的扭力,减小驱动器对右轮的扭力,以帮助助行器转向,使得转向更加省力。
107.在本实施例中,驱动器包括至少两个驱动件,分别用于驱动左轮和右轮。在其他实施例中,驱动器也可以只包括一个驱动件,用于驱动左轮和右轮。
108.参见图5,在本实施例中,根据转向助力补偿值对左轮和/或右轮进行助力补偿的方法具体可以包括:
109.s263、若助行器为向前左转或向后右转,则助力补偿后的驱动器对左轮的扭力值pl1=pl0-p1,其中,pl0为助力补偿前的驱动器对左轮的扭力值,助力补偿后的驱动器对右轮的扭力值pr1=pr0 p2,其中,pr0为助力补偿前的驱动器对右轮的扭力值。
110.s264、若助行器为向前右转或向后左转,则助力补偿后的驱动器对左轮的扭力值pl1=pl0 p1,助力补偿后的驱动器对右轮的扭力值pr1=pr0-p2。
111.本实施例通过在助行器转向时对助行器的左轮和/或右轮进行助力补偿,能够使得使用者在推动助行器转向时更加省力,使得力气较小的使用者在使用助行器时更加便捷,减小转向对助行器的行进速度的影响,保证助行器的正常行进,避免因转向阻力增大造成突然的停顿,能够提高安全性。
112.参见图6,本发明助行器包括主体架及分别设置于主体架底部的左轮和右轮,助行器的转向助力控制方法另一实施例包括:
113.s310、获取左轮的第一移动速度、右轮的第二移动速度。
114.s320、判断左轮和/或右轮是否处于转向状态。
115.s330、若左轮和/或右轮处于转向状态,则根据第一移动速度、第一移动方向、第二移动速度和第二移动方向判断助行器的转向运行状态。
116.s340、若左轮和/或右轮不处于转向状态,则不做操作。
117.在本实施例中,s310至s340的具体方法可以参见上述助行器的转向助力控制方法实施例中的s210至s240,在此不再赘述。
118.s350、根据第一移动速度、第二移动速度计算第一移动速度和第二移动速度的速度差值。
119.s360、根据速度差值得到转向助力补偿值,并根据转向助力补偿值对左轮和/或右轮进行助力补偿。
120.参见图7,在本实施例中,助行器还包括驱动器,驱动器用于驱动左轮和/或右轮,助力补偿值包括第一助力补偿值和/或第二助力补偿值,根据速度差值得到转向助力补偿
值,并根据转向助力补偿值对左轮和/或右轮进行助力补偿的方法具体可以包括:
121.s361、第一助力补偿值p1=k*dv*n1,其中k为不同档位下的比例参数,dv为第一移动速度v1和第二移动速度v2的速度差值,n1为左轮的差速补偿比例。
122.s362、第二助力补偿值p2=k*dv*n2,其中n2为右轮的差速补偿比例。
123.在本实施例中,可以根据使用者的需要人为或自动设定助行器的速度档位,每一档位对应一个k的值,k可以为0.1至1,例如0.1、0.6或1等。在其他实施例中,k也可以为固定值,例如0.5、0.8或1等。
124.在本实施例中,左轮速度调节比例可以通过人为设定或自动设定,n1可以为0至1,例如0、0.5或1等。
125.在本实施例中,右轮速度调节比例可以通过人为设定或自动设定,n2可以为0至1,例如0、0.5或1等。
126.在本实施例中,若助行器为向前左转或向后右转,则第一助力补偿值与第一移动速度、速度差值成反比关系,第二助力补偿值与第二移动速度、速度差值成正比关系,即需要减小驱动器对左轮的扭力,增加驱动器对右轮的扭力,以帮助助行器转向,使得转向更加省力;同理,若助行器为向前右转或向后左转,则第一助力补偿值与第一移动速度、速度差值成正比关系,第二助力补偿值与第二移动速度、速度差值成反比关系,即需要增加驱动器对左轮的扭力,减小驱动器对右轮的扭力,以帮助助行器转向,使得转向更加省力。
127.s363、若助行器为向前左转或向后右转,则助力补偿后的驱动器对左轮的扭力值pl1=pl0-p1,其中,pl0为助力补偿前的驱动器对左轮的扭力值,助力补偿后的驱动器对右轮的扭力值pr1=pr0 p2,其中,pr0为助力补偿前的驱动器对右轮的扭力值。
128.s364、若助行器为向前右转或向后左转,则助力补偿后的驱动器对左轮的扭力值pl1=pl0 p1,助力补偿后的驱动器对右轮的扭力值pr1=pr0-p2。
129.本实施例通过在助行器转向时对助行器的左轮和/或右轮进行助力补偿,能够使得使用者在推动助行器转向时更加省力,使得力气较小的使用者在使用助行器时更加便捷,减小转向对助行器的行进速度的影响,保证助行器的正常行进,避免因转向阻力增大造成突然的停顿,能够提高安全性。
130.参见图8和图9,本发明助行器10包括主体架100及分别设置于主体架100底部的左轮200和右轮300,助行器10的转向助力控制装置400实施例包括处理器410及控制器420,处理器410用于获取左轮的第一移动速度、右轮的第二移动速度,判断左轮和/或右轮是否处于转向状态,若左轮和/或右轮处于转向状态,则根据第一移动速度、第二移动速度计算转向角度预估值或第一移动速度和第二移动速度的速度差值,根据转向角度预估值或速度差值得到转向助力补偿值,控制器用于根据转向助力补偿值对左轮200和/或右轮300进行助力补偿。
131.本实施例通过在助行器10转向时对助行器10的左轮200和/或右轮300进行助力补偿,能够使得使用者在推动助行器10转向时更加省力,使得力气较小的使用者在使用助行器10时更加便捷,减小转向对助行器10的行进速度的影响,保证助行器10的正常行进,避免因转向阻力增大造成突然的停顿,能够提高安全性。
132.参见图10,本发明存储器500存储有程序数据510,程序数据510能够被执行以实现如上述助行器的转向助力控制方法实施例中的转向助力控制方法。
133.在本实施例中,存储器500可以是便携式存储介质,例如u盘、光盘等,也可以是终端、服务器等。
134.本实施例通过在助行器转向时对助行器的左轮和/或右轮进行助力补偿,能够使得使用者在推动助行器转向时更加省力,使得力气较小的使用者在使用助行器时更加便捷,减小转向对助行器的行进速度的影响,保证助行器的正常行进,避免因转向阻力增大造成突然的停顿,能够提高安全性。
135.以上所述仅为本发明的实施方式,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。