技术特征:
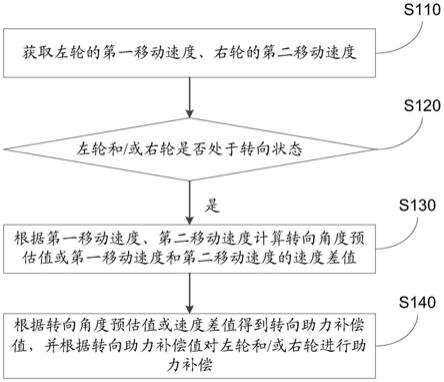
1.一种助行器的转向助力控制方法,所述助行器包括主体架及分别设置于所述主体架底部的左轮和右轮,其特征在于,所述转向助力控制方法包括:获取所述左轮的第一移动速度、所述右轮的第二移动速度;判断所述左轮和/或所述右轮是否处于转向状态;若所述左轮和/或所述右轮处于转向状态,则根据所述第一移动速度、所述第二移动速度计算转向角度预估值或所述第一移动速度和所述第二移动速度的速度差值;根据所述转向角度预估值或所述速度差值得到转向助力补偿值,并根据所述转向助力补偿值对所述左轮和/或所述右轮进行助力补偿。2.根据权利要求1所述的转向助力控制方法,其特征在于,所述判断所述左轮和/或所述右轮是否处于转向状态的方法包括:获取所述左轮的第一移动方向、所述右轮的第二移动方向;判断所述第一移动方向和所述第二移动方向是否都为向前或向后,且所述第一移动速度和所述第二移动速度的差值是否小于阈值;若所述第一移动方向和所述第二移动方向都为向前或向后,且所述第一移动速度和所述第二移动速度的差值小于阈值,则所述左轮和/或右轮为直行状态;否则所述左轮和/或所述右轮为转向状态。3.根据权利要求2所述的转向助力控制方法,其特征在于,所述判断所述左轮和/或所述右轮处于转向状态后还包括:根据所述第一移动速度、所述第一移动方向、所述第二移动速度和所述第二移动方向判断所述助行器的转向运行状态。4.根据权利要求3所述的转向助力控制方法,其特征在于,所述根据所述第一移动速度、所述第一移动方向、所述第二移动速度和所述第二移动方向判断所述助行器的转向运行状态的方法包括:若所述第二移动方向为向前,且所述第二移动速度的绝对值大于或等于所述第一移动速度的绝对值,则所述助行器为向前左转;若所述第一移动方向为向前,且所述第一移动速度的绝对值大于或等于所述第二移动速度的绝对值,则所述助行器为向前右转;若所述第一移动方向为向后,且所述第一移动速度的绝对值大于所述第二移动速度的绝对值,则所述助行器为向后左转;若所述第二移动方向为向后,且所述第二移动速度的绝对值大于所述第一移动速度的绝对值,则所述助行器为向后右转。5.根据权利要求4所述的转向助力控制方法,其特征在于,所述计算所述转向角度预估值的方法包括:若所述助行器为向前左转,则所述转向角度预估值α=-45
°
v1/v2*45
°
,其中v1为第一移动速度,v2为第二移动速度;若所述助行器为向前右转,则所述转向角度预估值α=45
°‑
v2/v1*45
°
;若所述助行器为向后左转,则所述转向角度预估值α=-45
°‑
v2/v1*45
°
;若所述助行器为向后右转,则所述转向角度预估值α=45
°‑
v1/v2*45
°
。6.根据权利要求5所述的转向助力控制方法,其特征在于,所述助力补偿值包括第一助
力补偿值和/或第二助力补偿值,所述根据所述转向角度预估值计算转向助力补偿值的方法包括:根据所述转向角度预估值、所述第一移动速度计算第一助力补偿值;和/或根据所述转向角度预估值、所述第二移动速度计算第二助力补偿值。7.根据权利要求5所述的转向助力控制方法,其特征在于,所述助力补偿值包括第一助力补偿值和/或第二助力补偿值,若所述助行器为向前左转或向后右转,则所述第一助力补偿值与所述第一移动速度、所述转向角度预估值成反比关系,所述第二助力补偿值与所述第二移动速度、所述转向角度预估值成正比关系;若所述助行器为向前右转或向后左转,则所述第一助力补偿值与所述第一移动速度、所述转向角度预估值成正比关系,所述第二助力补偿值与所述第二移动速度、所述转向角度预估值成反比关系。8.根据权利要求5所述的转向助力控制方法,其特征在于,所述助力补偿值包括第一助力补偿值和/或第二助力补偿值,所述第一助力补偿值p1=k*(|α|*v1/m1)*(|α|/90 1),其中k为不同档位下的比例参数,|α|为转向角度预估值的绝对值,v1为所述第一移动速度,m1为左轮速度调节比例,所述第二助力补偿值p2=k*(|α|*v2/m2)*(|α|/90 1),其中,v2为所述第二移动速度,m2为右轮速度调节比例。9.根据权利要求8所述的转向助力控制方法,其特征在于,所述助行器还包括驱动器,所述驱动器用于驱动所述左轮和/或右轮,根据所述转向助力补偿值对所述左轮和/或所述右轮进行助力补偿的方法包括:若所述助行器为向前左转或向后右转,则助力补偿后的所述驱动器对所述左轮的扭力值pl1=pl0-p1,其中,pl0为助力补偿前的所述驱动器对所述左轮的扭力值,助力补偿后的所述驱动器对所述右轮的扭力值pr1=pr0 p2,其中,pr0为助力补偿前的所述驱动器对所述右轮的扭力值;若所述助行器为向前右转或向后左转,则助力补偿后的所述驱动器对所述左轮的扭力值pl1=pl0 p1,助力补偿后的所述驱动器对所述右轮的扭力值pr1=pr0-p2。10.根据权利要求8所述的转向助力控制方法,其特征在于,k为0.1至1,m1为1至100,m2为1至100。11.根据权利要求4所述的转向助力控制方法,其特征在于,所述助行器还包括驱动器,所述驱动器用于驱动所述左轮和/或右轮,所述助力补偿值包括第一助力补偿值和/或第二助力补偿值,所述根据所述速度差值得到所述转向助力补偿值,并根据所述转向助力补偿值对所述左轮和/或所述右轮进行助力补偿的方法包括:所述第一助力补偿值p1=k*dv*n1,其中k为不同档位下的比例参数,dv为所述速度差值,n1为所述左轮的差速补偿比例,所述第二助力补偿值p2=k*dv*n2,其中n2为所述右轮的差速补偿比例;若所述助行器为向前左转或向后右转,则助力补偿后的所述驱动器对所述左轮的扭力值pl1=pl0-p1,其中,pl0为助力补偿前的所述驱动器对所述左轮的扭力值,助力补偿后的所述驱动器对所述右轮的扭力值pr1=pr0 p2,其中,pr0为助力补偿前的所述驱动器对所述右轮的扭力值;若所述助行器为向前右转或向后左转,则助力补偿后的所述驱动器对所述左轮的扭力
值pl1=pl0 p1,助力补偿后的所述驱动器对所述右轮的扭力值pr1=pr0-p2。12.一种助行器的转向助力控制装置,所述助行器包括主体架及分别设置于所述主体架底部的左轮和右轮,其特征在于,所述转向助力控制装置包括:处理器,所述处理器用于获取所述左轮的第一移动速度、所述右轮的第二移动速度,判断所述左轮和/或所述右轮是否处于转向状态,若所述左轮和/或所述右轮处于转向状态,则根据所述第一移动速度、所述第二移动速度计算转向角度预估值或所述第一移动速度和所述第二移动速度的速度差值,根据所述转向角度预估值或所述速度差值得到转向助力补偿值;控制器,所述控制器用于根据所述转向助力补偿值对所述左轮和/或所述右轮进行助力补偿。13.一种存储器,其特征在于,存储有程序数据,所述程序数据能够被执行以实现如权利要求1至11任意一项所述的转向助力控制方法。
技术总结
本发明公开了一种助行器的转向助力控制方法、转向助力控制装置及存储器,所述转向助力控制方法包括获取左轮的第一移动速度、右轮的第二移动速度,判断左轮和/或右轮是否处于转向状态,若是,则根据第一移动速度、第二移动速度计算转向角度预估值或第一移动速度和右轮的第二移动速度的速度差值,根据转向角度预估值或速度差值得到转向助力补偿值,并对左轮和/或右轮进行助力补偿,通过在助行器转向时进行助力补偿,能够使得使用者在推动助行器转向时更加省力,使得力气较小的使用者在使用助行器时更加便捷,减小转向对助行器的行进速度的影响,保证助行器的正常行进,避免因转向阻力增大造成突然的停顿,能够提高安全性。能够提高安全性。能够提高安全性。
技术研发人员:刁建 龚茂
受保护的技术使用者:浙江益恒悦医疗科技有限公司
技术研发日:2022.01.26
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。