1.本发明涉及无人机避障技术领域,具体为一种基于图像分析的无人机避障控制系统及方法。
背景技术:
2.无人机即无人驾驶飞机,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。随着无人机技术的快速发展,无人机以其重量轻、体积小、飞行灵活等优点,被广泛的应用于航空拍摄、资源勘探、地图测绘、货物运输、城市安全之中。
3.在无人机工作过程中,无人机常常会在一些复杂的环境中飞行,从而飞行的过程中难免会遇到一些比如建筑、鸟雀之类的障碍物,如果无人机无法及时进行避障,那很有可能导致无人机的损坏。
技术实现要素:
4.本发明的目的在于提供一种基于图像分析的无人机避障控制系统及方法,以解决上述背景技术中提出的问题。
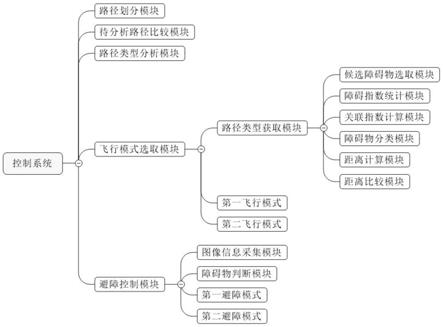
5.为了解决上述技术问题,本发明提供如下技术方案:一种基于图像分析的无人机避障控制系统,所述控制系统包括路径划分模块、待分析路径比较模块、路径类型分析模块和飞行模式选取模块,所述路径划分模块将无人机的该次飞行路径划分成若干段分路径,设各段分路径分别为待分析路径,所述待分析路径比较模块获取无人机的历史飞行信息,依次将历史飞行信息中的各段分路径与某个待分析路径进行比较,其中,历史飞行信息包括飞行过程中采集到的图像信息,如果存在某次历史飞行中的某段分路径与某个待分析路径相同,设该次历史飞行为无人机的该次飞行中该个待分析路径的参考飞行,参考飞行中分路径采集到的图像为该个待分析路径的参考图像,所述路径类型分析模块获取某个待分析路径的所有参考图像,并据此判断待分析路径的类型,其中,待分析路径的类型包括第一路径、第二路径,所述飞行模式选取模块用于当无人机在待分析路径上飞行时,根据无人机飞行到的待分析路径的类型确定无人机的飞行模式。
6.进一步的,所述飞行模式选取模块包括路径类型获取模块、第一飞行模式和第二飞行模式,所述路径类型获取模块用于获取无人机飞行到的待分析路径的类型,当无人机飞行到的待分析路径为第一路径时,令第一飞行模式工作,当无人机飞行到的待分析路径为第二路径时,令第二飞行模式工作,所述第一飞行模式控制无人机以第一速度行驶,所述第二飞行模式控制无人机以第二速度行驶,其中,第二速度大于第一速度。
7.进一步的,所述控制系统还包括避障控制模块,所述避障控制模块包括图像信息采集模块、障碍物判断模块、第一避障模式和第二避障模式,所述图像信息采集模块获取无人机前方图像信息,在检测识别到无人机前方图像信息存在障碍物时,令障碍物判断模块判断该障碍物是否为静态障碍物,如果是静态障碍物,令第一避障模式工作,否则,令第二
避障模式工作,所述第一避障模式用于在检测到无人机的实时位置与静态障碍物的距离小于第一阈值时,控制无人机进行避障,所述第二避障模式用于在检测到无人机的实时位置与障碍物的距离小于第二阈值时,控制无人机进行避障,其中,第一阈值大于第二阈值。
8.进一步的,所述路径类型分析模块包括候选障碍物选取模块、障碍指数统计模块、关联指数计算模块、障碍物分类模块、距离计算模块和距离比较模块,所述候选障碍物选取模块获取该个待分析路径所有的参考飞行中的参考图像,分别识别各个参考图像中各个障碍物的位置,设参考图像中识别到的障碍物为候选障碍物,所述障碍指数统计模块在某次参考飞行中的参考图像中识别出障碍物时,那么该个障碍物为该次参考飞行的关联障碍物,该个障碍物的障碍指数加1,其中,某个障碍物的障碍指数初始值为0,所述关联指数计算模块计算某个候选障碍物的关联指数p=m/k,其中,m为该个候选障碍物的障碍指数,k为该个待分析路径的参考飞行的个数,所述障碍物分类模块将某个候选障碍物的关联指数与关联阈值进行比较,如果某个候选障碍物的关联指数大于等于关联阈值,那么标记该障碍物为静态状态物,否则,该候选障碍物为动态障碍物,所述距离计算模块用于在待分析路径的地图上标记各个动态障碍物的位置,分别计算两两动态障碍物的之间的距离的和的平均值,所述距离比较模块将待分析路径所对应的平均值与距离阈值进行比较,在平均值大于距离阈值时,该个待分析路径为第一路径,在平均值小于等于距离阈值时,该个待分析路径为第二路径。
9.一种基于图像分析的无人机避障控制方法,所述避障控制方法包括以下步骤:
10.将无人机的该次飞行路径划分成若干段分路径,设各段分路径分别为待分析路径,
11.获取无人机的历史飞行信息,依次将历史飞行中的各段分路径与某个待分析路径进行比较,
12.如果存在某次历史飞行中的某段分路径与某个待分析路径相同,设该次历史飞行为无人机的该次飞行中该个待分析路径的参考飞行,参考飞行中分路径采集到的图像为该个待分析路径的参考图像,
13.获取某个待分析路径的所有参考图像,并据此判断该个待分析路径的类型,其中,待分析路径的类型包括第一路径还是第二路径,
14.当无人机在待分析路径上飞行时,根据无人机飞行到的待分析路径的类型确定无人机的飞行模式。
15.进一步的,根据无人机飞行到的待分析路径的类型确定无人机的飞行模式包括:
16.当无人机飞行到的待分析路径为第一路径时,控制无人机以第一速度行驶,
17.当无人机飞行到的待分析路径为第二路径时,控制无人机以第二速度行驶,
18.其中,第二速度大于第一速度。
19.进一步的,所述当无人机在待分析路径上飞行时还包括:
20.获取无人机前方图像信息,如果检测识别到无人机前方图像信息存在障碍物时,
21.判断该障碍物是否为静态障碍物,
22.如果该障碍物为静态障碍物,在检测到无人机的实时位置与静态障碍物的距离小于第一阈值时,控制无人机进行避障,
23.否则,在检测到无人机的实时位置与障碍物的距离小于第二阈值时,控制无人机
进行避障,其中,第一阈值大于第二阈值。
24.进一步的,所述判断该个待分析路径为第一路径还是第二路径包括:
25.获取该个待分析路径所有的参考飞行中的参考图像,分别识别各个参考图像中各个障碍物的位置,设参考图像中识别到的障碍物为候选障碍物,其中,如果某次参考飞行中的参考图像中识别出某个障碍物,那么该个障碍物为该次参考飞行的关联障碍物,该个障碍物的障碍指数加1,其中,某个障碍物的障碍指数初始值为0,
26.那么计算某个候选障碍物的关联指数p=m/k,其中,m为该个候选障碍物的障碍指数,k为该个待分析路径的参考飞行的个数,如果某个候选障碍物的关联指数大于等于关联阈值,那么标记该障碍物为静态状态物;
27.否则,该候选障碍物为动态障碍物,
28.在待分析路径的地图上标记各个动态障碍物的位置,分别计算两两动态障碍物的之间的距离的和的平均值,
29.如果平均值大于距离阈值,那么该个待分析路径为第一路径,
30.否则,该个待分析路径为第二路径。
31.与现有技术相比,本发明所达到的有益效果是:本发明通过分析无人机在待分析路径的历史飞行当中采集到的图像确定待分析路径中的静态障碍物和动态障碍物情况,根据待分析路径当中的静态障碍物确定无人机的避障模式,根据待分析路径当中的动态障碍物确定无人机的飞行模式,从而在保证无人机及时避障的同时提高无人机的飞行效率。
附图说明
32.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
33.图1是本发明基于图像分析的无人机避障控制系统的模块示意图。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.请参阅图1,本发明提供技术方案:一种基于图像分析的无人机避障控制系统,所述控制系统包括路径划分模块、待分析路径比较模块、路径类型分析模块和飞行模式选取模块,所述路径划分模块将无人机的该次飞行路径划分成若干段分路径,设各段分路径分别为待分析路径,所述待分析路径比较模块获取无人机的历史飞行信息,依次将历史飞行信息中的各段分路径与某个待分析路径进行比较,其中,历史飞行信息包括飞行过程中采集到的图像信息,如果存在某次历史飞行中的某段分路径与某个待分析路径相同,设该次历史飞行为无人机的该次飞行中该个待分析路径的参考飞行,参考飞行中分路径采集到的图像为该个待分析路径的参考图像,所述路径类型分析模块获取某个待分析路径的所有参考图像,并据此判断待分析路径的类型,其中,待分析路径的类型包括第一路径、第二路径,所述飞行模式选取模块用于当无人机在待分析路径上飞行时,根据无人机飞行到的待分析
路径的类型确定无人机的飞行模式。
36.所述飞行模式选取模块包括路径类型获取模块、第一飞行模式和第二飞行模式,所述路径类型获取模块用于获取无人机飞行到的待分析路径的类型,当无人机飞行到的待分析路径为第一路径时,令第一飞行模式工作,当无人机飞行到的待分析路径为第二路径时,令第二飞行模式工作,所述第一飞行模式控制无人机以第一速度行驶,所述第二飞行模式控制无人机以第二速度行驶,其中,第二速度大于第一速度。
37.所述控制系统还包括避障控制模块,所述避障控制模块包括图像信息采集模块、障碍物判断模块、第一避障模式和第二避障模式,所述图像信息采集模块获取无人机前方图像信息,在检测识别到无人机前方图像信息存在障碍物时,令障碍物判断模块判断该障碍物是否为静态障碍物,如果是静态障碍物,令第一避障模式工作,否则,令第二避障模式工作,所述第一避障模式用于在检测到无人机的实时位置与静态障碍物的距离小于第一阈值时,控制无人机进行避障,所述第二避障模式用于在检测到无人机的实时位置与障碍物的距离小于第二阈值时,控制无人机进行避障,其中,第一阈值大于第二阈值。
38.所述路径类型分析模块包括候选障碍物选取模块、障碍指数统计模块、关联指数计算模块、障碍物分类模块、距离计算模块和距离比较模块,所述候选障碍物选取模块获取该个待分析路径所有的参考飞行中的参考图像,分别识别各个参考图像中各个障碍物的位置,设参考图像中识别到的障碍物为候选障碍物,所述障碍指数统计模块在某次参考飞行中的参考图像中识别出障碍物时,那么该个障碍物为该次参考飞行的关联障碍物,该个障碍物的障碍指数加1,其中,某个障碍物的障碍指数初始值为0,所述关联指数计算模块计算某个候选障碍物的关联指数p=m/k,其中,m为该个候选障碍物的障碍指数,k为该个待分析路径的参考飞行的个数,所述障碍物分类模块将某个候选障碍物的关联指数与关联阈值进行比较,如果某个候选障碍物的关联指数大于等于关联阈值,那么标记该障碍物为静态状态物,否则,该候选障碍物为动态障碍物,所述距离计算模块用于在待分析路径的地图上标记各个动态障碍物的位置,分别计算两两动态障碍物的之间的距离的和的平均值,所述距离比较模块将待分析路径所对应的平均值与距离阈值进行比较,在平均值大于距离阈值时,该个待分析路径为第一路径,在平均值小于等于距离阈值时,该个待分析路径为第二路径。
39.一种基于图像分析的无人机避障控制方法,所述避障控制方法包括以下步骤:
40.将无人机的该次飞行路径划分成若干段分路径,设各段分路径分别为待分析路径,
41.获取无人机的历史飞行信息,依次将历史飞行中的各段分路径与某个待分析路径进行比较,
42.如果存在某次历史飞行中的某段分路径与某个待分析路径相同,设该次历史飞行为无人机的该次飞行中该个待分析路径的参考飞行,参考飞行中分路径采集到的图像为该个待分析路径的参考图像,
43.获取某个待分析路径的所有参考图像,并据此判断该个待分析路径的类型,其中,待分析路径的类型包括第一路径还是第二路径,
44.所述判断该个待分析路径为第一路径还是第二路径包括:
45.获取该个待分析路径所有的参考飞行中的参考图像,分别识别各个参考图像中各
个障碍物的位置,设参考图像中识别到的障碍物为候选障碍物,参考飞行中飞行到待分析路径段时无人机会采集到很多图像,通过人工智能技术来识别是否是同一个障碍物;
46.其中,如果某次参考飞行中的参考图像中识别出某个障碍物,那么该个障碍物为该次参考飞行的关联障碍物,该个障碍物的障碍指数加1,其中,某个障碍物的障碍指数初始值为0,
47.那么计算某个候选障碍物的关联指数p=m/k,其中,m为该个候选障碍物的障碍指数,k为该个待分析路径的参考飞行的个数,如果某个候选障碍物的关联指数大于等于关联阈值,那么标记该障碍物为静态状态物;当某个候选障碍物的关联指数较大,说明无人机在待分析路径的参考飞行中检测到的次数比较多,那很有可能是静止的障碍物即静态障碍物;
48.否则,该候选障碍物为动态障碍物,
49.在待分析路径的地图上标记各个动态障碍物的位置,参考飞行中飞行到待分析路径段时无人机会采集到很多图像,获取某个障碍物在该次飞行中所有图像采集到的位置的中心点为作为该个动态障碍物的位置;
50.无人机中分别计算两两动态障碍物的之间的距离的和的平均值,比如某个待分析路径的地图上标记有3个动态障碍物a、b、c、d,那么获取a和b、a和c、a和d、b和c、b和d、c和d之间的距离l1、l2、l3、l4、l5、l6,那么平均值为(l1 l2 l3 l4 l5 l6)/6;
51.如果平均值大于距离阈值,那么该个待分析路径为第一路径,
52.如果平均值小于等于距离阈值,那么该个待分析路径为第二路径。
53.当无人机在待分析路径上飞行时,根据无人机飞行到的待分析路径的类型确定无人机的飞行模式。
54.根据无人机飞行到的待分析路径的类型确定无人机的飞行模式包括:
55.当无人机飞行到的待分析路径为第一路径时,控制无人机以第一速度行驶,
56.当无人机飞行到的待分析路径为第二路径时,控制无人机以第二速度行驶,
57.其中,第二速度大于第一速度;当待分析路径为第一路径时,说明待分析路径上出现的动态障碍物位置比较分散,说明待分析路径上任何一段路径都有可能突然出现鸟雀等障碍物,所以无人机的速度应该慢一些,这样能够保证在出现障碍物时及时躲开,当待分析路径为第二路径时,说明待分析路径上出现的动态障碍物位置比较集中,说明待分析路径上只有某一段路径可能突然出现鸟雀等动态障碍物,其他的路径出现鸟雀等动态障碍物的几率很小,此时,所以无人机的速度稍微快一些,从而提高无人机的飞行效率;
58.所述当无人机在待分析路径上飞行时还包括:
59.获取无人机前方图像信息,如果检测识别到无人机前方图像信息存在障碍物时,
60.判断该障碍物是否为静态障碍物,这里的静态障碍物即为根据参考图像分析出来的静态障碍物,
61.如果该障碍物为静态障碍物,在检测到无人机的实时位置与静态障碍物的距离小于第一阈值时,控制无人机进行避障,因为静态障碍物的位置是固定不变的,所以在与静态障碍物距离比较短时开始避障也是来得及的,
62.如果该障碍物不是静态障碍物,一般都是动态障碍物,在检测到无人机的实时位置与障碍物的距离小于第二阈值时,控制无人机进行避障,其中,第一阈值大于第二阈值,
动态障碍物由于会移动,所以在离障碍物距离比较远的时候就开始避障,从而减小发生碰撞的概率。
63.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
64.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。