1.本发明属于灌溉输配水自动控制与水资源管理领域,具体涉及一种水联网灌区的全渠系自适应预测控制方法。
背景技术:
2.全世界每年水资源利用总量的70%被用于农业灌溉,在未来人口增加和经济增长的双重压力下,粮食安全将面临前所未有的挑战,而农业所依赖的灌溉用水总量有限,持续加大农业节水力度、提高水资源利用效率的重要意义不言而喻。
3.灌溉渠系输配水过程对水资源利用效率影响显著。在传统的灌区管理模式下,渠系管理调度不合理、控制方式不精细等因素都会造成灌溉过程中水资源的浪费,根据美国垦务局的统计,这些因素导致的水量损失可占到灌溉过程水量总损失的20%~30%。传统的人工控制模式下,信息传递缓慢,优化调度困难,水量控制不精准,过灌和欠灌现象时有发生,水资源利用效率偏低,而且操作过程繁琐,人力成本、运行费用偏高。灌溉渠系自动化控制技术可以有效解决这些弊端,为灌区水资源优化配置提供技术保障。
4.渠道自动控制算法在设计时有分布式控制和集中式控制两种类型,前者面向单输入单输出控制系统,后者面向多输入多输出控制系统,单输入单输出的典型控制算法有比例积分微分(proportion-integral-derivative,pid)控制,由于渠系中各控制闸门间具有耦合效应,直接使用pid控制效果不佳;多输入多输出的典型控制算法有线性二次型(linear quadratic,lq)最优控制、模型预测控制(model predictive control,mpc),两者相较而言,模型预测控制可以考虑系统未来已知的扰动,属于前馈反馈耦合的类型,控制效果更优。
5.实际应用时,由于多输入多输出控制算法基本都采用积分时滞模型(integrator delay model,idm)对自动控制系统建模,该模型适用的工况范围较窄,在水流扰动较复杂,系统时变性较强的情况下准确性欠佳,因而模型预测控制中的预测误差会显著增加,进而导致基于预测情形的控制偏差增加。而且,目前模型预测控制算法中对系统的约束条件描述还不够充分,流量、水位约束未考虑取水口对闸前水位的需求、未考虑渠道的不冲不淤流速限制等。因此,在灌区输配水系统的自动控制中,模型预测控制的理论效果理想,但实际应用却比较受限。
6.综上所述,目前用于全渠系控制效果较优的先进算法——模型预测控制对预测模型的准确性要求较高,不能很好地应对大中型灌区沿程取水口较多、未知扰动复杂、系统时变性强的特性。水联网灌区的监测体系可以实时提供大量的系统状态数据,为自适应控制算法的开发和应用提供了可能,然而,如何很好地利用实时观测数据指导渠系自动控制的设计,相关研究尚不充分,更未有实际工程中的应用。
技术实现要素:
7.本发明的目的是为克服目前已有控制算法不能很好地应对大中型灌区取水口较
多、未知扰动复杂、系统时变性强的特性,提出一种水联网灌区的全渠系自适应预测控制方法。本发明依据在线观测的数据序列,结合智能优化算法,建立自适应预测控制模型,依据运行需求进行有约束的优化求解,可实际应用于灌区闸门的自动化控制设计,可有效适应灌溉过程中的多种未知扰动和灌溉输配水系统的时变性质,显著减小渠道运行中的水位波动,实现精量化、智能化灌溉,大幅降低灌区管理的人力成本,有效提高灌区的水资源利用效率和管理水平。
8.为了实现上述目的,本发明采用如下技术方案:
9.本发明提出一种水联网灌区的全渠系自适应预测控制方法,包括以下步骤:
10.建立全渠道系统控制模型;
11.根据全渠道系统控制模型对水位变化过程进行预测;
12.依据全渠道系统的实时运行需求,设定自动控制的时间间隔,并明确渠道内水流的约束条件;
13.在渠道运行约束条件的限定下,联合求解控制时域内全渠道系统所有闸门的开度动作。
14.可选的,建立可依据实测数据序列进行在线系统辨识的全渠系控制模型,具体如下:
15.s11:识别灌区内全部闸门的控制模式;
16.灌区输配水系统的过程控制通常包括流量和水位两类目标,对于进水闸、分水闸、取水闸而言,其运行目标是过闸流量稳定在目标值附近;对于节制闸而言,其运行目标是调节渠道内的各类扰动,使水位保持在目标值附近。对于大型灌区而言,每座闸门具体服务于哪类控制目标比较复杂,需依据具体运行需求进行判定,根据系统的能控性要求,水位控制的节制闸数量不能少于具有水位控制目标的渠池数量,依据这一原则明确所有闸门的控制模式。
17.s12:建立状态空间方程形式的系统控制模型;
18.渠系中有n个水位调控节制闸,形成了n个具有水位控制目标的渠池,输配水系统过程控制的对象为下游节制闸闸前水位与设定水位目标的差值yi,下标i表示第i个渠池。在下游节制闸的控制作用下,渠池被分为伪均匀流区和回水区两个部分,在伪均匀流区选取其中ni个取水闸的桩号位置作为分段点,将伪均匀流区共分为ni 1段,则系统变量的变化规律由下式描述:
[0019][0020]
式中,模型的参数包括回水区面积和迟滞时间两类,为回水区的蓄水面积,m2,可依据断面形状参数和水深计算得出;τ
i,0
为渠首的流量变化传播至回水区的迟滞时间,s;τ
i,j
为第j个渠段的流量变化传播至回水区的迟滞时间,s;其余变量为水联网灌区中的实时观测变量,为渠首的输入流量,为渠尾的下泄流量,为回水区的总取水流量,为第j个渠段的总取水流量,m3/s。
[0021]
根据迟滞时间的大小,自适应地选择组成状态变量x(k)和扰动变量d(k)的历史长度范围,以节制闸调控动作为控制变量u(k),水位偏差为输出变量y(k),可建立如下状态空
间方程形式的系统控制模型
[0022]
x(k 1)=gx(k) hu(k) zd(k)#(2);
[0023]
y(k)=cx(k)#(3);
[0024]
式中,g为状态矩阵,h为控制矩阵,z为扰动矩阵,c为输出矩阵。在自适应控制模式下,上述变量、矩阵系数都是时变的。
[0025]
s13:利用优化算法,对自动控制模型的参数进行在线寻优;
[0026]
在渠道运行过程中,流量和水位是时刻变化的,这些变化会影响系统系数矩阵的取值,如果直接对系数矩阵参数寻优,维度灾问题难以解决。考虑对系统隐含参数回水区面积和迟滞时间进行寻优,在给定一组参数取值时,可以得到对应的系统模型,根据实测数据序列可对该模型的拟合误差进行实时评估,因此可以采用启发式优化搜索算法,如遗传算法(genetic algorithm,ga)、粒子群算法(particle swarm optimization,pso)、差分进化算法(differential evolution,de)等对自动控制模型的参数进行在线寻优,由此建立可依据实测数据序列进行在线系统辨识的全渠系控制模型。
[0027]
可选的,对预测时域内的水位变化过程进行预测,具体如下:
[0028]
s21:预测伪均匀流区的蓄水量变化;
[0029]
第i个渠池中第j个渠段的蓄水量的变化,会影响到控制点水位的变化,这一影响过程可以将其等效视为该渠段内取水流量的变化,计算式如下
[0030][0031]
式中,为对应渠段的蓄水面积,m2,可由当前时刻的水深算出;δt是离散化的时间步长;δh
i,j
可由取水闸闸前水位的实时观测数据得到,但未来时刻δh
i,j
的需要建立预测模型获得。伪均匀流区的水位变化,主要受到该渠段自身及附近几个渠段过去一段时间内水位、流量变化的影响,例如可建立预测模型如下
[0032][0033]
式中,f可以是多元回归模型(multivariate regression model,mrm)、神经网络模型(artificialneuralnetworks,ann)、支持向量机模型(supportvector machine,svm)等形式。
[0034]
s22:预测控制点水位的变化,具体如下:
[0035]
采用修正后的替换式(1)中的根据优化后的系统控制模型对控制点的水位变化过程进行预测,设定预测时域为p,离散形式的计算可表达为如下形式
[0036][0037]
式中,各个变量为预测时域内系统变量的并集,即:
[0038][0039]
式中,表示在k时刻对k p时刻系统输出的预测值;m
x
、mu、md为系数矩阵,
可由式(2)的系数矩阵推算得出。
[0040]
可选的,依据渠系的实时运行需求,设定自动控制的时间间隔,并明确渠道内水流的流量、水位、流速等约束条件;
[0041]
s31:设定自动控制的时间间隔;
[0042]
综合考虑自动控制系统的各项因素,包括控制系统数据传输用时t1、算法在线求解用时t2、闸门执行控制动作用时t3、系统当前的偏差值大小、能源消耗与供给情况等,设定合适的自动控制时间间隔δt。例如,系统偏差值较大时,采用较小的时间间隔有利于系统的稳定恢复,偏差值较小时,采用较大的时间间隔有利于能源的节约;同时,时间间隔应该大于数据传输、算法求解、闸门执行的总用时之和,即满足下式。
[0043]
δt》t1 t2 t3#(8);
[0044]
s32:分析系统变量的约束条件,具体如下:
[0045]
在灌区输配水自动控制的过程中,除了水位稳定在设定值这一定值控制目标外,还有一些约束控制目标,主要包括三个方面,一是水位控制约束,二是水位变速控制约束,三是流速控制约束。对于回水区而言,其水位在预测时域内的上下界分别为yu、y
l
时,回水区水位约束表达式如下:
[0046][0047]
其中,x(k)是系统的状态变量,u(k)、d(k)分别是系统的控制变量u(k)、扰动变量d(k)在预测时域上的列向量形式的合并,如式(7)所示。yu、y
l
分别是水位在预测时域内的上、下界。m
x
、mu、md是系统预测式(6)的系数矩阵,是由系统控制模型中的系数矩阵算出的,具体算式如下:
[0048][0049]
对于伪均匀流区而言,不存在回水效应,其水位主要受渠首下泄流量的影响,该控制约束条件可以转化为节制闸的下泄流量必须在上下界qu、q
l
以内,表达式如下:
[0050][0051]
式中,φ为下三角单位矩阵;q(k-1)为前一时刻的节制闸下泄流量。
[0052]
水位变速约束要求水位在一定时间内不能超过某一变化幅度,对回水区而言是δy不超过某一范围,对伪均匀流区而言则是δq不超过某一范围,同样地,这两个约束条件可写为式(9)和式(10)的形式,只是上下界的具体取值有所不同,约束条件取不等式解集的交集即可。
[0053]
灌溉系统要求渠道内水流处于不冲不淤的流速范围,渠道水流属于非恒定渐变流,其流速由流量决定,因此,该约束条件也可以转化为节制闸的下泄流量必须在某个范围内,即式(10)的形式,求解时也是取不等式解集的交集即可。
[0054]
可选的,在渠道运行约束条件的限定下,联合求解控制时域内全渠系所有闸门的开度动作,具体如下:
[0055]
s41:建立自动控制系统优化的目标函数;
[0056]
选定如下表达式为系统控制的性能指标,也即目标函数:
[0057][0058]
式中,yr(k)为系统输出参考量,即系统控制作用下y(k)的控制目标取值;q为状态加权半正定矩阵,r为控制加权正定矩阵。将系统预测式(6)代入式(11),可得到:
[0059][0060]
式(12)是以u(k)为自变量的二次型函数。
[0061]
s42:求解约束条件下目标函数最小化时的所有闸门的开度动作;
[0062]
最优控制问题最终转化为如下的标准二次规划形式:
[0063][0064]
s.t.au(k)≤b#(14);
[0065]
式中,hu为海森矩阵,为梯度向量,各系数矩阵(向量)的表达式如下:
[0066]hu
=(qmu)
t
qmu r
t
r#(15);
[0067][0068][0069][0070]
求解二次规划问题式(13)在式(14)约束下的最优解u
*
(k),即为所有节制闸在预测时域内的最优控制动作,将u
*
(k)中的第一步,即u
*
(k)传达给各节制闸执行,而后,下一时刻,重新进行步骤1的系统辨识与建模、步骤2的水位变化预测、步骤3的约束条件识别、步骤4的约束优化求解,得到再下一时刻的节制闸控制动作,循环往复,滚动优化。
[0071]
经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种水联网灌区的全渠系自适应预测控制方法,在每一步的控制动作求解前首先对系统模型进行基于实测数据序列的优化,使其能够较好地反映当前时刻系统的特性,无论是未知扰动的影响,还是系统的时变过程都会反映在实时辨识的系统模型中;而预测环节利用了输配水系统中已知的取水闸未来的流量变化,前馈反馈的耦合使得系统在应对复杂多变的灌溉情形有较为充足的预先准备和反应时间;综合两项优势,形成了全渠系自适应预测控制方法,可有效适应灌溉过程中的多种未知扰动和灌溉输配水系统的时变性质。除此以外,自动控制系统的约束条件也充分考虑了渠道内流量、水位、流速等运行限制,更贴近实际灌区的运行需求。经过优化大中型灌区全渠系自适应预测控制的在线求解仅需几秒时间,可实际应用于灌区闸门的自动化控制设计,有效适应灌溉过程中的多种未知扰动和灌溉输配水系统的时变性
质,显著减小渠道运行中的水位波动,实现精量化、智能化灌溉,大幅降低灌区管理的人力成本,有效提高灌区的水资源利用效率和管理水平。
附图说明
[0072]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
[0073]
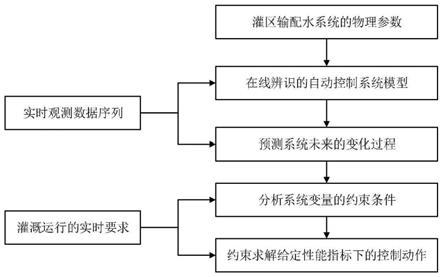
图1为本发明的整体流程图;
[0074]
图2为本发明的灌区的渠系结构示意图;
[0075]
图3a-图3b为本发明的控制点水位偏差的变化过程示意图;
[0076]
图3c为本发明的取水闸流量的变化过程示意图;
[0077]
图3d为本发明的各渠池平均流速的变化过程示意图。
具体实施方式
[0078]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0079]
本发明提出一种水联网灌区的全渠系自适应预测控制方法,该方法的整体流程图如图1所示,包括以下步骤:
[0080]
1)建立可依据实测数据序列进行在线系统辨识的全渠系控制模型;
[0081]
1-1)识别灌区内全部闸门的控制模式;
[0082]
案例灌区的渠系结构如附图2所示,包含一条总干渠(h),三条干渠(a、b、c),一条支干渠(bb),共分为10个渠池,渠池间的连接箭头表示对应的进水闸或分水闸或节制闸,每个支渠的最末端也具有一座控制性节制闸,因此该渠系一共含有14座大型的控制性水闸,依据一个渠池对应一座水位调控节制闸的原则,有4座控制性水闸需要设置为流量控制模式。在我国大型灌区的管理中,总干渠进水闸通常不由灌区管理处管辖,总进水量需要提前申请,不适于进行实时控制;在支渠分水处,应尽量选择正对渠道或者下游情况较简单的闸门作为水位控制闸。识别为流量控制模式的4座控制性水闸分别是总干渠的进水闸,干渠a、b的进水闸以及支干渠bb的进水闸。同时,每个渠池侧向有4个取水闸,全部为流量控制模式,整个渠系共54个待控制闸门,灌区渠系的物理参数如表1所示,闸门控制模式识别的结果如表2所示。
[0083]
表1待控制渠系的物理参数
[0084]
渠池编号长度(m)底坡糙率边坡系数设计流量(m3/s)设计水深(m)h50001:100000.0232853.2a150001:70000.0232252.5a240001:50000.0212202.4a330001:50000.0212152.3
b150001:70000.0232352.4b240001:50000.0202302.3b330001:50000.0222152.2bb140001:50000.0232152.3bb230001:50000.0202102.2c140001:50000.0242252.4
[0085]
表2待控制闸门的控制模式识别
[0086][0087][0088]
1-2)建立状态空间方程形式的系统控制模型;
[0089]
案例渠系中有10个水位调控节制闸和10个具有水位控制目标的渠池,输配水系统过程控制的对象为下游节制闸闸前水位与设定水位目标的差值yi,下标i表示第i个渠池。
在下游节制闸的控制作用下,渠池被分为伪均匀流区和回水区两个部分,在伪均匀流区选取4个取水闸的桩号位置作为分段点(即ni=4),将每个渠池分为5段,则系统变量的变化规律由下式描述:
[0090][0091]
式中,模型的参数包括回水区面积和迟滞时间两类,为回水区的蓄水面积,m2,可依据断面形状参数和水深计算得出;τ
i,0
为渠首的流量变化传播至回水区的迟滞时间,s;τ
i,j
为第j个渠段的流量变化传播至回水区的迟滞时间,s;其余变量为水联网灌区中的实时观测变量,为渠首的输入流量,为渠尾的下泄流量,为回水区的总取水流量,为第j个渠段的总取水流量,m3/s。
[0092]
根据迟滞时间的大小,自适应地选择组成状态变量x(k)和扰动变量d(k)的历史长度范围,以节制闸调控动作为控制变量u(k),水位偏差为输出变量y(k),可建立如下状态空间方程形式的系统控制模型:
[0093]
x(k 1)=gx(k) hu(k) zd(k)#(2);
[0094]
y(k)=cx(k)#(3);
[0095]
式中,g为状态矩阵,h为控制矩阵,z为扰动矩阵,c为输出矩阵。在自适应控制模式下,上述变量、矩阵系数的维度和数值都是时变的。在案例灌区中,渠系相对复杂,系统变量维度较高,状态变量和扰动变量维度过百,因而各个系数矩阵维度的行或列至少有一个维度也在一百以上,待定系数的数量上万。
[0096]
1-3)利用优化算法,对自动控制模型的参数进行在线寻优;
[0097]
在渠道运行过程中,流量和水位是时刻变化的,这些变化会影响系统系数矩阵的取值,如果直接对系数矩阵参数寻优,维度灾问题难以解决。考虑对系统隐含参数回水区面积和迟滞时间进行寻优,在案例灌区中可将原本需要优化的系数矩阵g、h、z,共上万个待定系数降维至60个隐含参数,在给定一组参数取值时,可以得到对应的系统模型,根据实测数据序列可对该模型的拟合误差进行实时评估,因此可以采用启发式优化搜索算法,如遗传算法(genetic algorithm,ga)、粒子群算法(particle swarm optimization,pso)、差分进化算法(differential evolution,de)等对自动控制模型的参数进行在线寻优,由此建立可依据实测数据序列进行在线系统辨识的全渠系控制模型。
[0098]
2)对预测时域内的水位变化过程进行预测;
[0099]
2-1)预测伪均匀流区的蓄水量变化;
[0100]
第i个渠池中第j个渠段的蓄水量的变化,会影响到控制点水位的变化,这一影响过程可以将其等效视为该渠段内取水流量的变化,计算式如下
[0101][0102]
式中,为对应渠段的蓄水面积,m2,可由当前时刻的水深算出;δt是离散化的时间步长;δh
i,j
可由取水闸闸前水位的实时观测数据得到,但未来时刻δh
i,j
的需要建立预测模型获得。伪均匀流区的水位变化,主要受到该渠段自身及附近几个渠段过去一段时
间内水位、流量变化的影响,例如可建立预测模型如下:
[0103][0104]
式中,f可以是多元回归模型(multivariate regression model,mrm)、神经网络模型(artificialneuralnetworks,ann)、支持向量机模型(supportvector machine,svm)等形式。本案例中采用神经网络模型进行拟合。
[0105]
2-2)预测控制点水位的变化;
[0106]
采用修正后的替换式(1)中的根据优化后的系统控制模型对控制点的水位变化过程进行预测,设定预测时域为p,离散形式的计算可表达为如下形式:
[0107][0108]
式中,各个变量为预测时域内系统变量的并集,即:
[0109][0110]
式中,表示在k时刻对k p时刻系统输出的预测值;m
x
、mu、md为系数矩阵,可由式(2)的系数矩阵推算得出。
[0111]
3)依据渠系的实时运行需求,设定自动控制的时间间隔,并明确渠道内水流的流量、水位、流速等约束条件;
[0112]
3-1)设定自动控制的时间间隔;
[0113]
综合考虑自动控制系统的各项因素,包括控制系统数据传输用时t1、算法在线求解用时t2、闸门执行控制动作用时t3、系统当前的偏差值大小、能源消耗与供给情况等,设定合适的自动控制时间间隔δt。例如,系统偏差值较大时,采用较小的时间间隔有利于系统的稳定恢复,偏差值较小时,采用较大的时间间隔有利于能源的节约;同时,时间间隔应该大于数据传输、算法求解、闸门执行的总用时之和,即满足下式:
[0114]
δt》t1 t2 t3#(8)
[0115]
水联网灌区的数据传输时间在10s以内,本算法的求解时间经测试约2~10s,闸门的开度变化速度通常在1~2mm/s,每次调节一般不超过100mm,因此自动控制时间间隔δt最小可取2min,最长一般不超过10min,过长的时间间隔可能导致调控不及时,系统偏离设定值过多,本案例中取δt=2min。
[0116]
3-2)分析系统变量的约束条件;
[0117]
在灌区输配水自动控制的过程中,除了水位稳定在设定值这一定值控制目标外,还有一些约束控制目标,主要包括三个方面,一是水位控制约束,二是水位变速控制约束,三是流速控制约束。对于回水区而言,其水位在预测时域内的上下界分别为yu、y
l
时,回水区水位约束表达式如下:
[0118][0119]
通常而言,灌区对水位的限制要求为上下不超过0.2m,即水位上(下)界分别为设
计水位加(减)0.2m。对于伪均匀流区而言,不存在回水效应,其水位主要受渠首下泄流量的影响,该控制约束条件可以转化为节制闸的下泄流量必须在上下界qu、q
l
以内,表达式如下:
[0120][0121]
式中,φ为下三角单位矩阵;q(k-1)为前一时刻的节制闸下泄流量。本案例中根据取水闸可以充足供水确定下界,根据水位不超警戒确定上界。
[0122]
水位变速约束要求水位在一定时间内不能超过某一变化幅度,工程中通常限定为一小时水位变幅不大于15cm,即对应对回水区而言是δy不超过某一范围,对伪均匀流区而言则是δq不超过某一范围,同样地,这两个约束条件可写为式(9)和式(10)的形式,只是上下界的具体取值有所不同,约束条件取不等式解集的交集即可。
[0123]
灌溉系统要求渠道内水流处于不冲不淤的流速范围,本案例中设置流速限制范围为0.50m/s~0.90m/s,渠道水流属于非恒定渐变流,其流速由流量决定,因此,该约束条件也可以转化为节制闸的下泄流量必须在某个范围内,即式(10)的形式,求解时也是取不等式解集的交集即可。
[0124]
4)在渠道运行约束条件的限定下,联合求解控制时域内全渠系所有闸门的开度动作;
[0125]
4-1)建立自动控制系统优化的目标函数;
[0126]
选定如下表达式为系统控制的性能指标,也即目标函数:
[0127][0128]
式中,yr(k)为系统输出参考量,即系统控制作用下y(k)的控制目标取值;q为状态加权半正定矩阵,r为控制加权正定矩阵。将系统预测式(6)代入式(11),可得到
[0129][0130]
式(12)是以u(k)为自变量的二次型函数。
[0131]
4-2)求解约束条件下目标函数最小化时的所有闸门的开度动作;
[0132]
最优控制问题最终转化为如下的标准二次规划形式:
[0133][0134]
s.t.au(k)≤b#(14);
[0135]
式中,hu为海森矩阵,为梯度向量,各系数矩阵(向量)的表达式如下:
[0136]hu
=(qmu)
t
qmu r
t
r#(15);
[0137][0138]
[0139][0140]
求解二次规划问题式(13)在式(14)约束下的最优解u
*
(k),即为所有节制闸在预测时域内的最优控制动作,将u
*
(k)中的第一步,即u
*
(k)传达给各节制闸执行,而后,下一时刻,重新进行步骤1的系统辨识与建模、步骤2的水位变化预测、步骤3的约束条件识别、步骤4的约束优化求解,得到再下一时刻的节制闸控制动作,循环往复,滚动优化。
[0141]
本案例中设定的系统变化情景为,初始状态时40个取水闸全部恒定取水0.3m3/s,在2:00时,全部取水闸突然关闭,取水闸流量过程如图3所示,进水闸相应地减少12m3/s的流量,渠系突然从高负荷转入低负荷运行,以此试验自适应预测算法的调控性能。真实的灌区管理中不会出现此类情形,因为同时关闸会导致渠道的水位骤增,对工程而言是十分危险的,本案例如此设置是为了测试极端情境下的算法性能。本案例中采用matlab编程实现自适应预测控制算法,其中quadprog函数工具可用于求解含约束的二次规划问题,采用非恒定流模拟软件仿真计算了12小时内的灌区输配水系统变化过程,算法程序共调用360次,每次的计算时间1~10s,算法调用平均用时3.68s,远远小于2min的控制时间间隔,符合实时控制的应用要求。
[0142]
如图3a-图3d所示,十个渠池的控制点水位偏差最大也不超过0.08m,符合水位偏差不超过0.2m的要求,也没有超过小时变幅15cm的限制,各渠池的流速在运行过程中也符合运行范围0.50m/s~0.90m/s,系统运行的约束条件全部满足,系统完全恢复的调节时间约6h,控制效果良好,说明算法可实际用于灌区闸门的自动化控制设计,能够显著减小渠道运行中的水位波动,并满足实际运行中的各类约束条件,有效提高灌区的水资源利用效率和管理水平。
[0143]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。