1.本发明涉及智能控制技术领域,更具体的说是涉及一种智能弹药异类复合控制执行机构最优分配方法。
背景技术:
2.大部分大气层内直/气复合控制拦截弹在飞行时均要求充分利用气动舵,仅在末制导段为了提高制导控制精度,才开启姿控发动机,利用复合控制方式来加快响应速度,以实现动能拦截。该控制策略可以充分发挥气动力控制与直接力控制的能力,在保证直接力控制快速响应的前提下,减少姿控发动机的消耗。该种复合控制方式已经成为大气层内拦截弹实现精确制导控制至关重要的一部分,且已在部分国家的实际导弹型号中使用。依据固体发动机安装的位置,可以分为姿控式、轨控式以及姿轨控式三种复合控制导弹,美国的pac-3导弹等属于姿控式导弹,固体脉冲发动机位于其质心之前,复合控制时通过姿控发动机开机提供直接侧向力力矩使弹体姿态快速改变,已建立需要的攻角和侧滑角;俄罗斯的9m96e拦截弹等属于轨控式导弹,固体脉冲发动机位于质心处,直接由发动机推力提供过载;美国的thaad拦截弹等属于姿轨控式导弹,固体脉冲发动机位于质心以及质心后部,分别提供直接力与直接力矩,快速响应导弹的制导指令。
3.直接力/气动力复合控制导弹存在空气舵与姿控发动机两类冗余的执行机构,设计控制器时将姿控发动机与空气舵作为虚拟执行机构,可以降低控制器的设计难度,但需要相应的控制分配方法,将控制指令分配给两类执行机构。研究控制分配方法时,考虑姿控发动机具有明显的离散脉冲特性且数量存在限制,要求合理的设计分配策略,才能充分发挥气动力与直接力的工作特性。对于空气舵与姿控发动机两种异类机构之间的分配,常见的方法有链式递增法、加权伪逆法以及其他优化分配方法,但它们均存在一定的限制,无法满足直接力/气动力控制分配的需求。
4.因此,如何提出一种智能弹药异类复合控制执行机构最优分配方法是本领域技术人员亟需解决的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种智能弹药异类复合控制执行机构最优分配方法,解决了现有技术中无法满足直接力/气动力控制分配需求的问题。
6.为了实现上述目的,本发明采用如下技术方案:
7.一种智能弹药异类复合控制执行机构最优分配方法,包括以下步骤:
8.s1.进行上层分配;基于链式递增分配方法将控制器的虚拟力矩指令分配为使用空气舵实现的气动力矩指令分量m
ad
(t)和依靠姿控发动机推力提供的直接力矩指令分量m
rd
(t);
9.s2.进行下层分配;基于混合整形规划的姿态发动机分配方法将直接力矩指令分量m
rd
(t)具体分配为每个位置的姿控发动机开关机指令;
10.s3.每个位置的姿控发动机开关机指令的总和为实际力矩指令m
rc
(t),将实际力矩指令m
rc
(t)与上层分配的直接力矩指令分量m
rd
(t)的差值分配给空气舵,与上层分配的气动力矩指令分量m
ad
(t)叠加为空气舵的气动力矩指令分量m
ac
(t),空气舵的气动力矩指令分量m
ac
(t)与实际力矩指令m
rc
(t),共同控制复合控制导弹。
11.优选的,s1中进行上层分配的具体步骤包括:
12.s11.设置执行机构的优先级;
13.s12.在控制分配过程中将控制指令分配给优先级高的执行机构,当这一执行机构达到饱和时再分配给下一级的执行机构;其中,
14.对于i级执行机构,第i级的控制效率矩阵为gi,分配完的控制输入为ui,则控制分配问题表示为:
15.md=g1u1 g2u2
…gm
um16.在控制分配过程中,优先使用第一级执行机构,判断仅使用第一级执行机构是否能提供足够的控制力矩,即是否满足md=g1u1,若第一级执行机构直到饱和仍不能提供足够的控制力矩,此时第一级执行机构取饱和值u1=sat
u1
(p1md),则使用下一级执行机构分配剩余指令力矩m
d2
=m
d-g1u1,依次类推将控制力矩指令完全分配,具体分配表达式为:
[0017][0018]
式中,gipi=i,表示第i级的执行机构偏转饱和约束。
[0019]
优选的,s2的具体方法为:
[0020]
s21.对下层待分配的总控制力矩指令m
d2
中偏航通道指令m
d2,1
和俯仰通道指令m
d2,2
用矢量形式表示;通过指令矢量确定最优分配位置;
[0021]
s22.针对最优分配位置的姿控发动机的两侧,分别选择相邻的q个位置,将所选择的2q个位置和最优分配位置上的姿控发动机的开启数量作为规划变量u
′r∈rn×1,并截取出对应的控制效率矩阵t
′
,要求满足:
[0022]md2
=t
′u′r[0023]
s23.下层姿控发动机分配时,要求俯仰偏航方向的分配力矩误差最小,同时消耗的姿控发动机最少,则根据混合整型线性规划方法将下层姿控发动机分配问题表示为:
[0024][0025][0026]
其中,u
′s为松弛变量,ωy与ω
p
分别表示偏航和俯仰方向上力矩分配误差的权值系数,ωi表示i号位置处姿控发动机开启的权值系数。
[0027]
优选的,s21的具体内容包括:
[0028]
由指令力矩合成矢量确定直接力fd的方向,与直接力fd的反方向e最接近的姿控发动机位置即为最优分配位置,直接力fd的反方向e与初始姿控发动机位置之间的夹角定义为γ,则
[0029][0030]
优选的,s23中,根据混合整型线性规划方法将下层姿控发动机分配问题表示前将分配问题描述为:
[0031][0032][0033][0034]
式中,ωi表示i号位置处姿控发动机开启的权值系数,ωk表示俯仰或偏航的控制力矩分配误差的权值系数;在分配指令力矩时,为单个通道能够提供的实际控制力矩,m
d2,k
为对应通道的指令力矩。
[0035]
优选的,将控制器与控制分配同时考虑时,引入控制器跟踪误差来动态调整各方向上的权值系数,其中,俯仰或偏航的控制力矩分配误差的权值系数ωk为:
[0036][0037]
式中,表示力矩分配误差的权值系数的下界,ek为直接力发动机k工作方向。
[0038]
经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种智能弹药异类复合控制执行机构最优分配方法,链式递增法形式简单,求解速度快,适用于工程实际,能更好地协调使用两种执行机构的控制效能,在保持响应速度以及稳定跟踪的情况下,有效地减少姿控发动机消耗,并且本发明在满足控制分配的精度要求条件下,基于混合整型规划的姿控发动机分配方法的分配结果极大地减少了姿控发动机的开启数量,并提高了计算速度,适合用于离散的姿控发动机控制指令的分配。
附图说明
[0039]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
[0040]
图1附图为本实施例提供的控制系统结构图;
[0041]
图2附图为本实施例提供的分层控制分配结构图;
[0042]
图3附图为本实施例提供的跟踪阶跃信号控制力矩指令曲线示意图;
[0043]
图4附图为本实施例提供的基于链式递增法的复合控制分配方法流程图;
[0044]
图5附图为本实施例提供的姿控发动机模型;
[0045]
图6附图为本实施例提供的指令矢量合成示意图;
[0046]
图7附图为本实施例提供的未加限制偏航方向控制力矩示意图;
[0047]
图8附图为本实施例提供的未加限制俯仰方向控制力矩示意图;
[0048]
图9附图为本实施例提供的未加限制控制力矩误差示意图;
[0049]
图10附图为本实施例提供的未加限制姿控发动机开机数量示意图;
[0050]
图11附图为本实施例提供的加限制的偏航方向控制力矩示意图;
[0051]
图12附图为本实施例提供的加限制的俯仰方向控制力矩示意图;
[0052]
图13附图为本实施例提供的加限制的控制力矩误差示意图;
[0053]
图14附图为本实施例提供的加限制的姿控发动机开机数量示意图;
[0054]
图15附图为本实施例提供的攻角跟踪曲线示意图;
[0055]
图16附图为本实施例提供的俯仰舵偏曲线示意图;
[0056]
图17附图为本实施例提供的正俯仰区rcs开启情况示意图;
[0057]
图18附图为本实施例提供的负俯仰区rcs开启情况示意图。
具体实施方式
[0058]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0059]
本发明实施例公开了一种智能弹药异类复合控制执行机构最优分配方法,本实施例以pac-3导弹执行机构为例对该方法进行具体说明:
[0060]
直/气复合控制导弹存在空气舵与姿控发动机两种异类的冗余控制执行机构,本实施例将姿控发动机与空气舵作为虚拟执行机构,设计控制器输出控制力矩指令,再设计分配方法将控制力矩指令分配给不同的执行机构。控制系统结构如图1所示。
[0061]
其中控制分配器可以分为上下两层进行设计,在上层分配中,控制力矩指令按照特定的策略或方法被分配为使用空气舵实现的气动力矩指令分量m
ad
(t)和依靠姿控发动机推力提供的直接力矩指令分量m
rd
(t)。在下层分配中,依据空气舵与姿控发动机各自的控制特性及姿控发动机具体的位置分布,设计分配方法将直接力矩指令分量m
rd
(t)具体分配为每个位置的姿控发动机开关机指令。考虑到其输出具有离散特性,将姿控发动机的实际力矩指令m
rc
(t)与上层分配的直接力矩指令分量m
rd
(t)的差值分配给空气舵,与上层分配的气动力矩指令分量叠加为空气舵的气动力矩指令分量,具体分层控制分配器的结构如图2所示。
[0062]
直接力/气动力复合控制导弹为了准确拦截目标,在末制导段将会出现制导指令剧烈变化的情况,此时仅靠气动力不足以提供跟踪制导指令的控制力矩,需要采用复合控制的方式提高控制系统响应速度。制导指令剧烈变化的场景类似于多个阶跃信号,故研究
分配策略前需要先分析控制器跟踪阶跃信号时控制力矩指令的特点,再结合两种执行机构的工作特点设计分配策略。控制器跟踪阶跃信号时控制力矩曲线如图3所示。
[0063]
按照控制力矩指令的大小可以将其分为三个阶段,在跟踪阶跃信号的初始阶段,需要提供的控制力矩大于姿控发动机与空气舵饱和时的控制力矩总和,此时要求空气舵偏转量达到最大姿控发动机开启数量达到最大;在控制力矩分配阶段,控制力矩指令小于执行机构能提供的最大控制力矩,需要使用具体分配方法对控制力矩指令进行分配;在稳定跟踪阶段,控制力矩指令小于空气舵提供的最大控制力矩,为了减小姿控发动机开机产生的影响,仅使用空气舵提供控制力矩。
[0064]
常用的控制分配方法依据是否有优化性能指标可以分为优化方法和非优化方法两大类,考虑pac-3导弹执行机构的特点,非优化方法中的链式递增法较适合空气舵的连续特性与姿控发动机的离散特性,但是链式递增法分配时未考虑到协调应用两种执行机构的控制效能,仅使用优先级高的执行机构,易造成其操作量饱和的问题。故本实施例在控制分配的上层分配中,暂不考虑姿控发动机的离散特性使用优化方法进行分配,具体提出两种控制分配策略。
[0065]
使用链式递增法将控制指令分配给空气舵与姿控发动机,为了充分姿控发动机的提高控制器响应速度的能力,设置姿控发动机的优先级高于空气舵,即单次姿控发动机开启数量达到限制后,将剩余控制力矩分配给空气舵,并使用混合整型规划的方法具体分配不同位置姿控发动机的开关机状态。
[0066]
1.基于链式递增空气舵与姿控发动机分配方法进行上层分配:
[0067]
针对空气舵与姿控发动机两种异类执行机构的控制力矩指令分配,在保证控制力矩实现精度的前提下,减少空气舵的偏转量与姿控发动机的开启数量,本发明中主要采用空气舵与姿控发动机的上层分配方法,即将控制器的虚拟力矩指令分配为空气舵偏转提供的力矩与姿控发动机开启提供的力矩,在实施例中将姿控发动机产生的控制力矩假设为连续量进行分配设计。
[0068]
链式递增法的思想主要是将执行机构分级,在控制分配过程中将控制指令分配给优先级高的执行机构,当该执行机构达到饱和时再分配给下一级的执行机构。
[0069]
对于i级执行机构,第i级的控制效率矩阵为gi,分配完的控制输入为ui,则控制分配问题可以表示为
[0070]
md=g1u1 g2u2
…gm
um[0071]
在控制分配过程中,优先使用第一级执行机构,判断是否能提供足够的控制力矩,即是否满足md=g1u1,若第一级执行机构直到饱和仍不能提供足够的控制力矩,此时第一级执行机构取饱和值则使用下一级执行机构分配剩余指令力矩m
d2
=m
d-g1u1,依次类推将控制力矩指令完全分配,具体分配表达式为:
[0072]
[0073]
式中,gipi=i,表示第i级的执行机构偏转饱和约束。
[0074]
在本实施例中,针对pac-3导弹对于控制器响应速度的要求,将姿控发动机作为第一级执行机构,将空气舵作为第二级执行机构进行分配,此时能够快速改变导弹姿态,提高响应速度。具体分配方法如图4所示。
[0075]
2.基于混合整形规划的姿态发动机分配方法将直接力矩指令分量具体分配为每个位置的姿控发动机开关机指令:
[0076]
本实施例研究的对象姿控式pac-3导弹具有180个姿控发动机,姿控发动机模型如图5所示,分为1~18号姿控发动机位置,每个位置均有10个姿控发动机。下层分配方法需要将上层分配给姿控发动机的控制力矩指令转化为不同位置姿控发动机的开关机指令。考虑到姿控发动机提供的推力固定且工作时间固定,具有明显的离散特性,控制力矩指令的分配问题属于整型规划问题,该问题求解方法的复杂度与整数变量呈现指数关系,则分配180个发动机的开关机指令的方法时间复杂度为o(2
180
),若直接采用整型规划的方式进行分配,则效率太低。故本实施例不研究具体的整型规划的优化求解方法,仅通过适当的假设与处理降低求解方法的复杂度,实现姿控发动机的分配。
[0077]
研究下层分配方法时,要求每次单个位置开启的发动机数量限制为2个。其中姿控发动机的控制效率矩阵分量可以用t
k,i
表示为
[0078][0079]
式中,i表示姿控发动机位置,k=1和k=2分别表示偏航和俯仰通道,fa表示单个姿控发动机的推力,la表示姿控发动机距离导弹的质心距离。
[0080]
则下层姿控发动机分配问题可以表示为:
[0081]md2
=tur[0082]
式中,m
d2
=[m
d2,1
,m
d2,2
]
t
表示下层待分配的俯仰偏航方向控制力矩指令,每个位置发动机开启数量为ur∈r
18
×1,考虑到姿控发动机的离散特性与开启个数约束,ur中的元素只能取0,1,2。
[0083]
下层姿控发动机分配时,要求俯仰偏航方向的分配力矩误差最小,同时消耗的姿控发动机最少,则该分配问题可以描述为:
[0084][0085][0086][0087]
式中,ωi表示i号位置处姿控发动机开启的权值系数,ωk表示俯仰或偏航的控制力矩分配误差的权值系数。在分配指令力矩时,为了减少姿控发动机的消耗,约束分配完的
姿控发动机开启后在单个通道能够提供的实际控制力矩小于该通道的指令力矩m
d2,k
。
[0088]
考虑到式所表示的问题中,既含有连续的变量控制力矩指令,又含有整型变量姿控发动机开启数量,使用混合整型线性规划方法(mixed-integer linear programming,milp)来解决下层姿控发动机分配问题。定义松弛变量us∈r2×1,us=m
d2-tur,可将式重新表示为:
[0089][0090][0091]
式中,ωy与ω
p
分别表示偏航和俯仰方向上力矩分配误差的权值系数,考虑到力矩分配的精确性,各姿控发动机的分配权值ωi要远小于各方向的力矩误差权值ωk。将控制器与控制分配同时考虑时,引入控制器跟踪误差来动态调整各方向上的权值系数,即
[0092][0093]
式中,表示力矩分配误差的权值系数的下界,ek为直接力发动机k工作方向。
[0094]
当权值系数越大,则分配完消耗的姿控发动机数量越多,同时力矩误差越小;若权值系数减小,则指令力矩分配的精度会相应的降低。
[0095]
为了防止下层分配时,出现反复开启相反方向姿控发动机的情况,同时进一步简化混合整型规划问题,降低方法的时间复杂度,对允许开关机的位置进行限制,通过控制指令矢量合成的方法确定最优分配位置,仅选择最优分配位置两边与其相邻的共7个位置进行规划求解,同时为了提供的力矩与上节方法接近,要求每次单个位置开启的发动机数量限制为n个。
[0096]
控制力矩指令m
d2
中偏航通道指令m
d2,1
和俯仰通道指令为m
d2,2
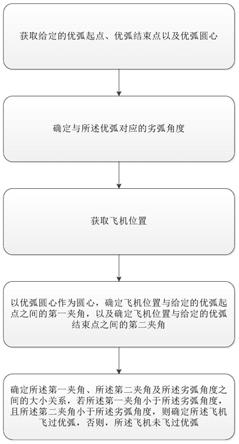
用矢量形式表示如图6所示。由指令力矩合成矢量确定直接力的方向,与直接力的反方向e最接近的姿控发动机位置即为最优分配位置,直接力的反方向e与1号姿控发动机位置之间的夹角定义为γ,则
[0097][0098]
取最有分配位置与左右相邻各3处位置的状态作为规划变量u
′r∈r7×1,并截取出与之对应的控制效率矩阵t
′
,要求满足
[0099]md2
=t
′u′r[0100]
使用混合整型线性规划的方法求解,可以表示为
[0101][0102][0103]
此时,分配方法的时间复杂度为o(n7),与为处理前相比明显降低。虽然那个此时分配精度会有所下降,但同时分配消耗的姿控发动机数量明显减少。
[0104]
下面将根据仿真结果对本发明中公开的方法进行进一步说明及分析:
[0105]
为了验证基于混合整型规划的姿控发动机分配方法的有效性,并分析加入分配位置限制对分配结果的影响,进行对比仿真分析。假设控制力矩指令为m
d2,1
=6000 2000sin(5πt)nm,m
d2,2
=6000 2000cos(5πt)nm,各姿控发动机分配权值系数选取为ωi=0.01,各方向的力矩误差权值系数选取为ωk=0.1,对于未加限制的混合整型规划方法每个位置姿控发动机最大允许开机数量为2,即ur中的元素只能取0,1,2;对于基于指令矢量合成限制分配位置的混合整型规划方法每个位置姿控发动机最大允许开机数量为4,即u
′r中的元素允许取0,1,2,3,4。
[0106]
其中,未加限制时控制效率矩阵为
[0107][0108]
以初始时刻为例,m
d2,1
=6000nm,m
d2,2
=6000nm,此时计算得到最优分配位置为γ=45
°
处,对应3号位置,此时规划的发动机处在18、1、2、3、4、5和6号位置,对应的控制效率矩阵为
[0109][0110]
未限制分配位置的milp分配方法仿真结果如图7~图10所示。
[0111]
由图9和图13可知,未限制分配位置的milp分配方法的控制分配误差较小在500nm之内,限制分配位置的milp分配方法误差略有增大,除一次分配的误差达到1034nm,其余均在1000nm以内,两种分配方法的控制力矩误差均小于单个姿控发动机推力产生的力矩fala=3800nm。由图10和图14可知,未加入分配位置限制的milp分配方法单次分配姿控发动机开启数量最大值为21个,而加入位置限制之后单次分配最大开启数量减少到3个,由此可见加入分配位置限制,能够有效地减少姿控发动机的消耗量,且计算速度明显提升。故虽然加入分配位置限制使得控制力矩误差有所增加,但是幅度不大能够满足控制分配的精度要求,且分配结果极大地减少了姿控发动机的开启数量,并提高了计算速度,适合用于离散的姿控发动机控制指令的分配。
[0112]
下面针对不同分配策略进行仿真后进行对比分析:
[0113]
本实施例的仿真中姿控发动机选用矩形输出的数学模型,且不考虑侧向喷流干扰产生的影响。在选取的特征点下分别利用该控制策略进行仿真。
[0114]
选取的特征点飞行高度为18km,飞行速度为600m/s,弹道倾角为30
°
攻角和侧滑角初值为0
°
,弹体姿态角速度初值为0
°
/s,气动参数如表1所示。
[0115]
表1特征点气动参数
[0116][0117]
采用本发明控制分配策略,使用控制器跟踪阶跃信号αc=βc=20
°
,具体控制器参数如图15和图16所示。空气舵偏转限制为δ
max
=30
°
,直接力矩指令分配上限m
rdmax
=7600nm。不考虑气动干扰稳态时,期望的执行机构操作量ud=[4.8
°ꢀ
4.8
°ꢀ
0 0]
t
。控制效率矩阵为:
[0118][0119]
为了研究该控制分配策略对控制效果的影响,其中链式递增 混合整型规划策略(dc milp):上层分配使用链式递增法,下层姿控发动机分配使用混合整型规划方法。该控制分配策略及仅使用空气舵控制时攻角跟踪结果如图15所示,空气舵偏转曲线如图16所示,姿控发动机开启情况如图17~图18所示。
[0120]
由图15可知,该控制策略能稳定跟踪控制指令,且响应速度远快与仅靠空气舵控制的情况,验证了该方法对于空气舵与姿控发动机两种异类冗余执行机构间分配的有效性。该控制策略跟踪指令的响应速度及达到稳定的时间即为接近。通过图16可以发现,该控制策略下空气舵前期处于饱和状态,此时为了快速建立攻角控制力矩较大,执行机构达到饱和。
[0121]
图17~图18显示两种分配策略下18个位置处姿控发动机开启情况,其中该控制策略开启姿控发动机16个。在0.1秒前为了建立攻角,需要提供正向的控制力矩,可以发现开启的姿控发动机均在正俯仰区。在0.1秒之后为了较小角速度需要提供负向的控制力矩,此时负俯仰区的姿控发动机开启,在0.3秒之后姿控发动机不再开启,此时攻角逐渐跟踪上指令,所需的控制力矩减小,仅靠空气舵足以提供。
[0122]
综上可知,链式递增法形式简单,求解速度快,适用于工程实际,能更好地协调使用两种执行机构的控制效能,在保持响应速度以及稳定跟踪的情况下,有效地减少姿控发动机消耗。
[0123]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0124]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本实施例中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本实施例所示的这些实施例,而是要符合与本实施例所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。