1.本发明涉及自动驾驶技术领域,尤其涉及一种适用于自动驾驶的应急转向控制系统及控制方法。
背景技术:
2.随着人们生活水平的提高,汽车已经逐渐成为每个家庭必备的一种交通工具。目前市面上的汽车按照驱动方式不同分别分为燃油汽车、燃气汽车和电力汽车,按照操作方式不同分为手动挡汽车和自动挡汽车。虽然汽车有多种类型,但是大多数的汽车还是需要人去控制车辆的形式方向和速度,驾驶员长时间驾驶时容易产生疲劳,进而导致注意力不集中,容易发生危险。而且驾驶员开车时必须集中精神力,不能做其他的事,对驾驶员的精神产生很大的压力。随着自动控制技术的发展,无人驾驶和自动导航技术取得了很大的进步,自动驾驶汽车代替人工进行驾驶对于提高驾驶的安全性,降低驾驶员的工作强度有着重要的意义。
3.然而,当前的自动驾驶技术还不够完善,尤其是遇到紧急突发事件,自动驾驶的车辆无法进行有效转向,交通事故高发。
技术实现要素:
4.为此,本发明提供一种适用于自动驾驶的应急转向控制系统及控制方法,用以克服现有技术中在自动驾驶的时候遇到突发事件车辆无法进行有效判定转向避让的问题。
5.为实现上述目的,本发明提供一种适用于自动驾驶的应急转向控制系统,包括,
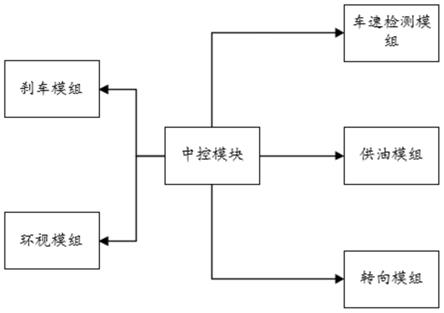
6.车速检测模组,用以检测自动驾驶过程中的实时车速;
7.供油模组,用以调节驾驶过程中对发动机的供油量;
8.转向模组,用以控制自动驾驶过程中的车辆转向;
9.刹车模组,用以在自动驾驶过程中控制车辆刹车降速;
10.环视模组,用以在自动驾驶过程中检测车辆周围情况;
11.中控模块,其与所述车速检测模组、所述供油模组、所述转向模组、所述刹车模组、所述环视模组分别相连,在车辆进行自动驾驶的过程中所述环视模组实时检测车辆周围,并生成自动驾驶预计行驶路线,当所述环视模组在预设行驶路线上检测到物体时,中控模块根据整车运行的状态与车辆周围情况,对车辆运行状态进行调整。
12.进一步地,所述环视模组实时将检测到的图像信息传递至所述中控模块,当所述环视模组在预设行驶路线上检测到物体x时,中控模块即刻控制车辆进行减速;
13.当中控模块控制车辆进行减速时,所述供油模组停止对发动机的供油,所述刹车模组启动以控制车辆减速;
14.所述中控模块判定物体x与车辆的之间的距离l1,所述车速检测模组将检测到的实时车速v传递至所述中控模块,中控模块根据路况信息选择合适的减速模式,并判定在碰撞物体x前车辆能否停稳,
15.所述中控模块计算车辆停稳预计距离ly,ly=v2÷
2a
×
q1,其中,q1为车辆停稳预计距离计算补偿参数,a车辆减速参数,对于不同的减速模式a的数值不同;
16.所述中控模块将车辆停稳预计距离ly与距离l1进行对比,
17.当ly≤l1时,所述中控模块判定车辆停止前不会与物体x发生碰撞,中控模块不控制转向模组对车辆进行转向;
18.当当ly>l1时,所述中控模块判定车辆会与物体x发生碰撞,中控模块控制转向模组对车辆进行转向。
19.进一步地,所述中控模块内设置有第一预设减速模式,第二预设减速模式,第三预设减速模式,第一预设车辆减速参数a1,第二预设车辆减速参数a2,第三预设车辆减速参数a3,a1>a2>a3;
20.所述环视模组获取环境信息并将路况信息传递至所述中控模块,中控模块选取应的减速模式,
21.当中控模块选取第一预设减速模式进行减速时,一并选取第一预设车辆减速参数a1作为车辆减速参数a的数值;
22.当中控模块选取第二预设减速模式进行减速时,一并选取第二预设车辆减速参数a2作为车辆减速参数a的数值;
23.当中控模块选取第三预设减速模式进行减速时,一并选取第三预设车辆减速参数a2作为车辆减速参数a的数值。
24.车辆减速模式可以根据天气情况进行选取,
25.当车辆行驶环境为非雨雪天气时,中控模块选取第一预设减速模式进行减速;
26.当车辆行驶环境为下雨天气时,中控模块选取第二预设减速模式进行减速;
27.当车辆行驶环境为下雪天气时,中控模块选取第三预设减速模式进行减速。
28.车辆减速模式可以根据路面情况进行选取,
29.当车辆行驶环境为普通公路时,中控模块选取第一预设减速模式进行减速;
30.当车辆行驶环境为干燥土路/有大量浮土公路时,中控模块选取第二预设减速模式进行减速;
31.当车辆行驶环境为泥泞土路/有积水、积雪公路时,中控模块选取第三预设减速模式进行减速。
32.进一步地,当所述中控模块判定车辆需要进行转向以避让物体x时,所述环视模组连续获取物体x的图像信息,并将获取的结果传递至中控模块,中控模块判定物体x的运行状态,并根据物体x的运行状态确定按照原设定驾驶预计行驶路线形式,车辆与物体x预计碰撞时的路面位置w;
33.所述中控模块内设置有横向安全距离lh,中控模块获取w左右两侧的空余道路距离,其中左面空余道路距离l2,右面空余道路距离l3,中控模块将横向安全距离lh与左面空余道路距离l2,右面空余道路距离l3分别进行对比,
34.当lh>l2时,所述中控模块判定左侧道路不满足转向避让宽度;
35.当lh≤l2时,所述中控模块判定左侧道路满足转向避让宽度;
36.当lh>l3时,所述中控模块判定右侧道路不满足转向避让宽度;
37.当lh≤l3时,所述中控模块判定右侧道路满足转向避让宽度;
38.所述中控模块根据左右两侧的空余道路距离选取避让方案。
39.进一步地,当所述中控模块判定左侧道路满足转向避让宽度,且右侧道路不满足转向避让宽度时,中控模块向所述转向模组发出指令,转向模组控制车辆左转躲避;
40.所述中控模块根据左面空余道路距离l2、物体x与车辆的之间的距离l1、车辆的时速v确定向左转向的角度j2,j2=l2
÷
l1
÷v×
j1,其中,j1为车辆转向计算补偿参数;
41.当所述中控模块判定右侧道路满足转向避让宽度,且左侧道路不满足转向避让宽度时,中控模块向所述转向模组发出指令,转向模组控制车辆右转躲避;
42.所述中控模块根据右面空余道路距离l3、物体x与车辆的之间的距离l1、车辆的时速v确定向右转向的角度j3,j3=l3
÷
l1
÷v×
j1。
43.进一步地,当所述中控模块判定左侧道路满足转向避让宽度,右侧道路也满足转向避让宽度时,所述中控模块计算向左转向的角度j1与向右转向的角度j2,并将j1与j2进行对比,
44.当j1>j2时,所述中控模块向所述转向模组发出指令,转向模组控制车辆右转躲避;
45.当j1≤j2时,所述中控模块向所述转向模组发出指令,转向模组控制车辆左转躲避。
46.进一步地,当所述中控模块判定左侧道路不满足转向避让宽度,右侧道路也不满足转向避让宽度时,所述环视模组对左右两侧道路进行检测,判定道路左右两侧是否存有护栏,当单侧存有护栏时,中控模块向所述转向模组发出指令,转向模组控制车辆转向有护栏一侧进行碰撞摩擦减速,当双侧存有护栏时,所述中控模块向所述转向模组发出指令,转向模组控制车辆转右侧护栏一侧进行碰撞摩擦减速。
47.进一步地,当车辆满足转向躲避时,所述中控模块计算转向时长t,其中,i=2或3,当转向时长达到t时,所述转向模组控制车辆回正。
48.一种适用于自动驾驶的应急转向控制方法,应用于上述的适用于自动驾驶的应急转向控制系统,包括,
49.s1,判断预设行驶道路是否存有物体;
50.s2,判断是否需要转向,当预设行驶路线存有物体时,中控模块判断是否能够仅通过刹车就满足对物体进行避让;
51.s3,判断避让方向,当单独进行刹车不能够有效对物体进行避让时,中控模块分析环视模组获取的路面信息选择避让方向;
52.s4,确定回正时间,当能够通过转向对物体进行避让时,中控模块确定转向回正所需时间;
53.s5,规划新的运行路线。
54.进一步地,
55.在步骤s2中,所述中控模块根据不同的路况选取不同的减速模式;
56.在步骤s3中,当无法通过转向对物体进行避让时,所述中控模块根据环视模组确定道路左右两侧是否存有护栏,当存有护栏时,中控模块向所述转向模组发出指令,转向模组控制车辆转向有护栏一侧进行碰撞摩擦减速。
57.与现有技术相比,本发明的有益效果在于,本发明通过时刻监测预设行驶路线的状况,当路面突然监测到物体时,通过对路面情况进行分析,选取合适的车辆运行模式,解决了在自动驾驶的时候遇到突发事件车辆无法进行有效判定转向避让的问题,减少自动驾驶时交通事故发生的概率。
58.进一步地,中控模块对与物体之间的距离进行判定,当车辆通过减速即可完成避让时,车辆不进行转向,仅仅进行减速停车,同时,通过设置车辆停稳预计距离计算补偿参数,防止出现因路况、轮胎等问题导致停车距离延长,合理设置补偿参数,减少交通事故的发生。
59.进一步地,当车辆处于较恶劣的环境时,速度骤减可能带来打滑侧翻的危险,因此,本发明根据环境的不同选取不同的减速模式,进一步地保障了车辆的安全行驶,降低了安全事故发生概率。
60.进一步地,在车辆需要转向时,提前预估碰撞点的位置,并根据位置判定路面的剩余宽度是否符合避让条件,从而进行避让方案选取,进一步地保障了车辆的安全行驶,降低了安全事故发生概率。
61.进一步地,当单侧符合避让信息时,计算转向角,使得在最小的转向角下达到转向的目的,防止因转向过大引起车辆侧滑,保障了车辆的安全行驶,降低了安全事故发生概率。
62.进一步地,当双侧符合避让信息时,对比转向角,选取小角度一边作为转向方向,使得在最小的转向角下达到转向的目的,防止因转向过大引起车辆侧滑,保障了车辆的安全行驶,降低了安全事故发生概率。同时,考虑我国多为左舵车,当角度相同时向左侧避让,使驾驶员尽量远离物体x,最大限度保障驾驶员安全。
63.进一步地,当转向满足避让物体的需求后,所述转向模组控制车辆回正,重新确定运行线路,进一步地保障了车辆的安全行驶,降低了安全事故发生概率。
附图说明
64.图1为本发明所述适用于自动驾驶的应急转向控制系统的结构示意图。
具体实施方式
65.为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
66.下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
67.需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
68.此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,
可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
69.请参阅图1所示,
70.本发明提供一种适用于自动驾驶的应急转向控制系统及控制方法,用以克服现有技术中在自动驾驶的时候遇到突发事件车辆无法进行有效判定转向避让的问题。
71.为实现上述目的,本发明提供一种适用于自动驾驶的应急转向控制系统,包括,
72.车速检测模组,用以检测自动驾驶过程中的实时车速;
73.供油模组,用以调节驾驶过程中对发动机的供油量;
74.转向模组,用以控制自动驾驶过程中的车辆转向;
75.刹车模组,用以在自动驾驶过程中控制车辆刹车降速;
76.环视模组,用以在自动驾驶过程中检测车辆周围情况;
77.中控模块,其与所述车速检测模组、所述供油模组、所述转向模组、所述刹车模组、所述环视模组分别相连,在车辆进行自动驾驶的过程中所述环视模组实时检测车辆周围,并生成自动驾驶预计行驶路线,当所述环视模组在预设行驶路线上检测到物体时,中控模块根据整车运行的状态与车辆周围情况,对车辆运行状态进行调整。
78.本发明通过时刻监测预设行驶路线的状况,当路面突然监测到物体时,通过对路面情况进行分析,选取合适的车辆运行模式,解决了在自动驾驶的时候遇到突发事件车辆无法进行有效判定转向避让的问题,减少自动驾驶时交通事故发生的概率。
79.进一步地,所述环视模组实时将检测到的图像信息传递至所述中控模块,当所述环视模组在预设行驶路线上检测到物体x时,中控模块即刻控制车辆进行减速;
80.当中控模块控制车辆进行减速时,所述供油模组停止对发动机的供油,所述刹车模组启动以控制车辆减速;
81.所述中控模块判定物体x与车辆的之间的距离l1,所述车速检测模组将检测到的实时车速v传递至所述中控模块,中控模块根据路况信息选择合适的减速模式,并判定在碰撞物体x前车辆能否停稳,
82.所述中控模块计算车辆停稳预计距离ly,ly=v2÷
2a
×
q1,其中,q1为车辆停稳预计距离计算补偿参数,a车辆减速参数,对于不同的减速模式a的数值不同;
83.所述中控模块将车辆停稳预计距离ly与距离l1进行对比,
84.当ly≤l1时,所述中控模块判定车辆停止前不会与物体x发生碰撞,中控模块不控制转向模组对车辆进行转向;
85.当当ly>l1时,所述中控模块判定车辆会与物体x发生碰撞,中控模块控制转向模组对车辆进行转向。
86.中控模块对与物体之间的距离进行判定,当车辆通过减速即可完成避让时,车辆不进行转向,仅仅进行减速停车,同时,通过设置车辆停稳预计距离计算补偿参数,防止出现因路况、轮胎等问题导致停车距离延长,合理设置补偿参数,减少交通事故的发生。
87.进一步地,所述中控模块内设置有第一预设减速模式,第二预设减速模式,第三预设减速模式,第一预设车辆减速参数a1,第二预设车辆减速参数a2,第三预设车辆减速参数a3,a1>a2>a3;
88.所述环视模组获取环境信息并将路况信息传递至所述中控模块,中控模块选取应
的减速模式,
89.当中控模块选取第一预设减速模式进行减速时,一并选取第一预设车辆减速参数a1作为车辆减速参数a的数值;
90.当中控模块选取第二预设减速模式进行减速时,一并选取第二预设车辆减速参数a2作为车辆减速参数a的数值;
91.当中控模块选取第三预设减速模式进行减速时,一并选取第三预设车辆减速参数a2作为车辆减速参数a的数值。
92.车辆减速模式可以根据天气情况进行选取,
93.当车辆行驶环境为非雨雪天气时,中控模块选取第一预设减速模式进行减速;
94.当车辆行驶环境为下雨天气时,中控模块选取第二预设减速模式进行减速;
95.当车辆行驶环境为下雪天气时,中控模块选取第三预设减速模式进行减速。
96.车辆减速模式可以根据路面情况进行选取,
97.当车辆行驶环境为普通公路时,中控模块选取第一预设减速模式进行减速;
98.当车辆行驶环境为干燥土路/有大量浮土公路时,中控模块选取第二预设减速模式进行减速;
99.当车辆行驶环境为泥泞土路/有积水、积雪公路时,中控模块选取第三预设减速模式进行减速。
100.当车辆处于较恶劣的环境时,速度骤减可能带来打滑侧翻的危险,因此,本发明根据环境的不同选取不同的减速模式,进一步地保障了车辆的安全行驶,降低了安全事故发生概率。
101.进一步地,当所述中控模块判定车辆需要进行转向以避让物体x时,所述环视模组连续获取物体x的图像信息,并将获取的结果传递至中控模块,中控模块判定物体x的运行状态,并根据物体x的运行状态确定按照原设定驾驶预计行驶路线形式,车辆与物体x预计碰撞时的路面位置w;
102.所述中控模块内设置有横向安全距离lh,中控模块获取w左右两侧的空余道路距离,其中左面空余道路距离l2,右面空余道路距离l3,中控模块将横向安全距离lh与左面空余道路距离l2,右面空余道路距离l3分别进行对比,
103.当lh>l2时,所述中控模块判定左侧道路不满足转向避让宽度;
104.当lh≤l2时,所述中控模块判定左侧道路满足转向避让宽度;
105.当lh>l3时,所述中控模块判定右侧道路不满足转向避让宽度;
106.当lh≤l3时,所述中控模块判定右侧道路满足转向避让宽度;
107.所述中控模块根据左右两侧的空余道路距离选取避让方案。
108.在车辆需要转向时,提前预估碰撞点的位置,并根据位置判定路面的剩余宽度是否符合避让条件,从而进行避让方案选取,进一步地保障了车辆的安全行驶,降低了安全事故发生概率。
109.进一步地,当所述中控模块判定左侧道路满足转向避让宽度,且右侧道路不满足转向避让宽度时,中控模块向所述转向模组发出指令,转向模组控制车辆左转躲避;
110.所述中控模块根据左面空余道路距离l2、物体x与车辆的之间的距离l1、车辆的时速v确定向左转向的角度j2,j2=l2
÷
l1
÷v×
j1,其中,j1为车辆转向计算补偿参数;
111.当所述中控模块判定右侧道路满足转向避让宽度,且左侧道路不满足转向避让宽度时,中控模块向所述转向模组发出指令,转向模组控制车辆右转躲避;
112.所述中控模块根据右面空余道路距离l3、物体x与车辆的之间的距离l1、车辆的时速v确定向右转向的角度j3,j3=l3
÷
l1
÷v×
j1。
113.当单侧符合避让信息时,计算转向角,使得在最小的转向角下达到转向的目的,防止因转向过大引起车辆侧滑,保障了车辆的安全行驶,降低了安全事故发生概率。
114.进一步地,当所述中控模块判定左侧道路满足转向避让宽度,右侧道路也满足转向避让宽度时,所述中控模块计算向左转向的角度j1与向右转向的角度j2,并将j1与j2进行对比,
115.当j1>j2时,所述中控模块向所述转向模组发出指令,转向模组控制车辆右转躲避;
116.当j1≤j2时,所述中控模块向所述转向模组发出指令,转向模组控制车辆左转躲避。
117.当双侧符合避让信息时,对比转向角,选取小角度一边作为转向方向,使得在最小的转向角下达到转向的目的,防止因转向过大引起车辆侧滑,保障了车辆的安全行驶,降低了安全事故发生概率。同时,考虑我国多为左舵车,当角度相同时向左侧避让,使驾驶员尽量远离物体x,最大限度保障驾驶员安全。
118.进一步地,当所述中控模块判定左侧道路不满足转向避让宽度,右侧道路也不满足转向避让宽度时,所述环视模组对左右两侧道路进行检测,判定道路左右两侧是否存有护栏,当单侧存有护栏时,中控模块向所述转向模组发出指令,转向模组控制车辆转向有护栏一侧进行碰撞摩擦减速,当双侧存有护栏时,所述中控模块向所述转向模组发出指令,转向模组控制车辆转右侧护栏一侧进行碰撞摩擦减速。
119.当前方道路不满足转向避让要求时,中控模块控制所述转向模组发出指令,转向模组控制车辆转向有护栏一侧进行碰撞摩擦减速,减低碰撞时的冲击里,当两侧均有护栏时,向右侧进行碰撞摩擦减速,保护驾驶员。
120.进一步地,当车辆满足转向躲避时,所述中控模块计算转向时长t,其中,i=2或3,当转向时长达到t时,所述转向模组控制车辆回正。
121.当转向满足避让物体的需求后,所述转向模组控制车辆回正,重新确定运行线路,进一步地保障了车辆的安全行驶,降低了安全事故发生概率。
122.一种适用于自动驾驶的应急转向控制方法,应用于上述的适用于自动驾驶的应急转向控制系统,包括,
123.s1,判断预设行驶道路是否存有物体;
124.s2,判断是否需要转向,当预设行驶路线存有物体时,中控模块判断是否能够仅通过刹车就满足对物体进行避让;
125.s3,判断避让方向,当单独进行刹车不能够有效对物体进行避让时,中控模块分析环视模组获取的路面信息选择避让方向;
126.s4,确定回正时间,当能够通过转向对物体进行避让时,中控模块确定转向回正所
需时间;
127.s5,规划新的运行路线。
128.进一步地,
129.在步骤s2中,所述中控模块根据不同的路况选取不同的减速模式;
130.在步骤s3中,当无法通过转向对物体进行避让时,所述中控模块根据环视模组确定道路左右两侧是否存有护栏,当存有护栏时,中控模块向所述转向模组发出指令,转向模组控制车辆转向有护栏一侧进行碰撞摩擦减速。
131.至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。