1.本文涉及汽车智能驾驶辅助技术,尤指一种汽车及其环境感知装置。
背景技术:
2.随着科技时代的快速发展,汽车智能驾驶辅助系统得到了广泛应用。汽车智能驾驶辅助系统在提高路安全和交通效率方面有很大的潜力,而对交通环境的精确感知是智能驾驶辅助系统进行规划、决策和控制的基础。
3.视觉传感器作为智能驾驶辅助系统最常用的传感器,它能够获取周围环境的详细形状和纹理信息。但是视觉传感器容易受到光线和天气条件的影响,会导致降低传感器的性能,容易计算失误甚至失效。固态激光雷达作为智能驾驶辅助系统最常用的传感器,探测范围广、分辨率高、信息量丰富、可全天候工作,而且成本较低,还有一个巨大的优势,适用于汽车电子元件的规格标准。
4.将这些传感器置于汽车外部且凸出于汽车外表面可以增大传感器的探测范围,但传感器并不需要每时每刻都工作,例如在关闭智能驾驶辅助系统时传感器停止工作,传感器凸出于汽车外表面则会增加风阻,导致油耗和风噪的增大。尤其在停车状态下,凸出于汽车外表面的传感器容易遭到破坏。
技术实现要素:
5.为解决上述技术问题,本技术提供了一种环境感知装置,其包括:
6.主机,包括:
7.壳体,包括基座,用于与车身转动连接;
8.传感器组件,设置在所述基座的一侧,用于采集环境信息;以及
9.驱动机构,用于驱动所述基座转动;
10.其中,所述基座能转动到使传感器组件处于车身外的位置,也能转动到使传感器组件处于车身内的位置。
11.在一个示意的实施例中,所述壳体还包括从所述基座的一侧伸出的转轴;
12.所述驱动机构包括电机以及传动机构;
13.所述传动机构传动连接于所述电机的主轴和所述转轴,所述传动机构用于将所述电机输出的转矩传递到所述转轴上以使得所述主机转动。
14.在一个示意的实施例中,所述传动机构为齿轮传动机构、带传动机构或链条传动机构。
15.在一个示意的实施例中,所述主轴与所述转轴平行;
16.所述传动机构包括套设在所述主轴上的主动轮,套设在所述转轴上的从动轮以及箍在所述主动轮和所述从动轮上的传动带。
17.在一个示意的实施例中,所述转轴从所述基座的相对两侧伸出;
18.所述电机还包括能与所述车身相对固定的机身,所述主轴穿设于所述机身;
19.所述主动轮设置有两个,两个主动轮分别套设在所述主轴的相对两端;
20.所述从动轮设置有两个,两个从动轮分别套设在所述转轴的相对两端且两个所述从动轮分别与两个所述主动轮对齐;
21.所述传动带设置有两条,一条传动带箍在一组相互对齐的从动轮和主动轮上,另一条传动带箍在另一组相互对齐的从动轮和主动轮上。
22.在一个示意的实施例中,所述环境感知装置还包括用于连接所述车身的第一支座,所述第一支座上设置有与所述转轴间隙配合的第一轴孔。
23.在一个示意的实施例中,所述转轴从所述基座的相对两侧伸出;
24.所述第一支座设置有两个,两个第一支座的第一轴孔分别套装在所述转轴的相对两端。
25.在一个示意的实施例中,所述基座构造为板状结构。
26.在一个示意的实施例中,所述壳体包括设置在所述基座的一个板面上的保护壳,所述壳体和所述保护壳围合出一个用于容纳所述传感器组件的空腔。
27.在一个示意的实施例中,所述保护壳与所述基座之间为可拆卸连接。
28.在一个示意的实施例中,所述保护壳上设置有透光的透光窗口。
29.在一个示意的实施例中,所述传感器组件包括视觉传感器、激光雷达、毫米波雷达和/或超声波雷达。
30.在一个示意的实施例中,所述激光雷达为固体激光雷达。
31.本技术还提出了一种汽车,其包括如上所述的环境感知装置以及车身;
32.所述基座转动连接于所述车身。
33.在一个示意性的实施例中,所述车身包括顶棚,所述顶棚设置有安装开口;
34.所述基座设置于所述安装开口。
35.在一个示意性的实施例中,所述安装开口设置在所述顶棚的前端。
36.在一个示意性的实施例中,所述环境感知装置还包括密封件,所述密封件设置在所述安装开口的内壁与所述基座的侧面之间,用于封堵所述基座与安装开口的内壁之间的间隙。
37.在需要使用到传感器组件时,只需要通过驱动机构驱动主机转动,使得传感器组件转动到基座的外侧,此时传感器组件翻转到车身外,传感器组件凸出于车身外,传感器组件的探测范围较大。在不需要使用到传感器组件时,只需要通过驱动机构驱动主机转动,使得传感器组件转动到基座的内侧,此时传感器组件翻转到车身内,传感器组件不会凸出于车身外,此时风阻和风噪会减小,传感器组件也不容易遭受破坏。
38.本技术的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术而了解。本技术的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
附图说明
39.附图用来提供对本技术技术方案的理解,并且构成说明书的一部分,与本技术的实施例一起用于解释本技术的技术方案,并不构成对本技术技术方案的限制。
40.图1为本技术实施例中的一种汽车车顶的局部示意图;
41.图2为本技术实施例中的一种环境感知装置的拆解示意图;
42.图3为本技术实施例中的一种环境感知装置的局部示意图;
43.图4为本技术实施例中的一种环境感知装置的局部示意图;
44.图5为本技术实施例中的一种环境感知装置在使用状态下的示意图;
45.图6为本技术实施例中的一种环境感知装置在未使用状态下的示意图;
46.图7为本技术实施例中的一种环境感知装置的俯视示意图;
47.图8为本技术实施例中的一种密封件的剖视示意图;
48.图9为本技术实施例中的一种环境感知装置的立体示意图;
49.图10为本技术实施例中的透光板的剖视示意图;
50.图11为图10中的透光板的局部示意图。
具体实施方式
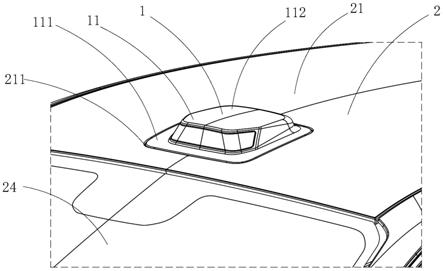
51.如图1所示,图1显示了一种汽车的局部示意图。该汽车包括车身2以及环境感知装置1。环境感知装置1安装在车身2上,且与车身2转动连接。
52.如图2所示,车身2包括顶棚21。顶棚21为大致的板状结构。顶棚21优选为钣金结构。顶棚21位于车身2的顶部。顶棚21上设置有安装开口211。安装开口211贯穿顶棚21。该安装开口211可以是大致的矩形孔。
53.如图3、4所示,环境感知装置1可以是安装在车身2的顶棚21上。环境感知装置1包括主机11、驱动机构12、第一支座14和第二支座15。第一支座14和第二支座15设置在顶棚21上。第一支座14和第二支座15可以是均设置在顶棚21朝下的一侧。第一支座14可以设置两个,两个第一支座14分别在安装开口211的相对两侧。第一支座14上设置有第一轴孔。两个第一支座14的第一轴孔相互对齐。第二支座15设置在安装开口211靠后的一侧。
54.主机11包括壳体110、传感器组件113和转轴114。壳体110包括基座111以及保护壳112。基座111可以构造为板状结构,例如为大致的矩形板状结构。保护壳112设置在基座111的一个板面上,保护壳112凸出于基座111。保护壳112和基座111围合出一个空腔。转轴114从基座111的相对两侧伸出。转轴114与基座111之间为固定连接。壳体110的基座111设置在安装开口211上。转轴114的两端分别穿设于两个第一支座14的第一轴孔。转轴114与第一轴孔之间为间隙配合。壳体110的基座111与车身2的顶棚21之间为转动连接。
55.传感器组件113设置在基座111的一侧且位于保护壳112和基座111所围合出的空腔内。传感器组件113用于采集汽车所处环境的环境信息。传感器组件113可以是视觉传感器、激光雷达、毫米波雷达和/或超声波雷达。在本实施例中,传感器组件113包括激光雷达,该激光雷达为固体激光雷达,该固体激光雷达可以是采用旋转多面体反射镜方案的固体激光雷达,也可以是采用双楔形棱镜型方案的固体激光雷达。
56.驱动机构12包括电机121以及传动机构122。传动机构122可以是齿轮传动机构、带传动机构或者链条传动机构。电机121用于驱动壳体110转动。传动机构122传动连接于电机121的主轴1212和壳体110的转轴114,传动机构122用于将电机121输出的转矩传递到壳体110的转轴114上以使得壳体110转动。
57.电机121包括机身1211和主轴1212。电机121的机身1211固定在第二支座15上。第二支座15可以构造为拱形的条状结构,第二支座15将电机121的机身1211箍在顶棚21的内
表面。电机121的机身1211与第二支座15之间可以是卡接、卡扣连接、螺钉连接或焊接。电机121的主轴1212从机身1211伸出。电机121的主轴1212与壳体110的转轴114相互平行。
58.传动机构122为带传动机构122。传动机构122包括主动轮1221、从动轮1222和传动带1223。主动轮1221套装在电机121的主轴1212上。主动轮1221与电机121的主轴1212之间可以是键连接,例如花键连接或平键连接,主动轮1221与电机121的主轴1212之间也可以是过盈配合。从动轮1222套装在主机11的转轴114上,从动轮1222与主动轮1221平齐。从动轮1222与主机11的转轴114之间可以是键连接,例如花键连接或平键连接,从动轮1222与主机11的转轴114之间也可以是过盈配合。传动带1223构造为环形。传动带1223具有柔性。传动带1223箍在主动轮1221和从动轮1222上,主动轮1221和从动轮1222将传动带1223张紧。主动轮1221和从动轮1222可以均构造为皮带轮,传动带1223可以构造为皮带。主动轮1221和从动轮1222也可以构造为同步带轮,传动带1223可以构造为同步带。
59.电机121的主轴1212转动时带动主动轮1221转动,主动轮1221在转动时通过传动带1223带动从动轮1222转动,从动轮1222转动时带动转轴114转动,转轴114在转动时带动主机11绕转轴114转动。
60.如图5所示,在需要使用到传感器组件113时,只需要通过驱动机构12驱动主机11转动,使得传感器组件113转动到基座111的外侧,此时传感器组件113翻转到车身外,传感器组件113凸出于车身外,传感器组件113的探测范围较大。如图6所示,在不需要使用到传感器组件113时,只需要通过驱动机构12驱动主机11转动,使得传感器组件113转动到基座111的内侧,此时传感器组件113翻转到车身内,传感器组件113不会凸出于车身外,此时风阻和风噪会减小,传感器组件113也不容易遭受破坏。
61.将环境感知装置1安装在汽车的顶棚21上,环境感知装置1的位置较高,传感器组件113的探测范围更大,更广,有效降低了探测盲区,提高了行车的安全性。
62.在一个示意性的实施例中,安装开口211设置在顶棚21的前端。即,安装开口211设置在顶棚21靠近前挡风玻璃24的一端。这样,环境感知装置1也位于顶棚21的前端,环境感知装置1可以对测量汽车前方的广泛区域进行测量。
63.在一个示意性的实施例中,如图7所示,电机121的主轴1212从电机121的机身1211的相对两端伸出。从动轮1222设置有两个,两个从动轮1222分别设置在电机121的主轴1212的相对两端。主动轮1221设置有两个,两个主动轮1221分别设置在转轴114的相对两端。两个主动轮1221分别与带两个从动轮1222对齐。传动带1223设置有两条,一条传动带1223箍在一组相互对齐的从动轮1222和主动轮1221上,另一条传动带1223箍在另一组相互对齐的从动轮1222和主动轮1221上。
64.转轴114驱动两个主动轮1221同步转动,两个主动轮1221分别通过两条传动带1223来带动两个从动轮1222同步转动,两个从动轮1222同步带动转轴114转动,这样,传动机构122能更稳定地将主轴1212输出的转矩传递到转轴114。另外,由于传动带1223被张紧,传动带1223对从动轮1222和主动轮1221施加相互靠近的作用力,这样,两个主动轮1221分别从主轴1212的两端对主轴1212施加靠近主机11的作用力,使得主轴1212受力更加平衡;同时,两个从动轮1222分别从转轴114的两端对转轴114施加靠近电机121的作用力,使得转轴114受力更加平衡。
65.在一个示意性的实施例中,保护壳112与基座111之间为可拆卸连接。保护壳112与
基座111之间可以是螺钉连接或卡扣连接。
66.由于保护壳112与基座111之间为可拆卸连接,在需要维修传感器组件113时,保护壳112和基座111能被拆分开,更方便检修。
67.在一个示意性的实施例中,如图2、8所示,环境感知装置1还包括密封件3。密封件3为弹性件。密封件3可以由橡胶或硅胶制成。该密封件3构造为环形。在基座111转动到与顶棚21平齐时密封件3套在基座111上,密封件3位于基座111的侧面与安装开口211的内壁之间。密封件3用于封堵基座111与安装开口211的内壁之间的间隙。密封件3可以是固定在安装开口211的内壁上。
68.密封件3能防止流体从车身外通过该间隙而进入到车身内,例如防止气流和雨水从该间隙进入到车身内。
69.在一个示意性的实施例中,密封件3内设置有环形通道31,环形通道31沿密封件3的周向延伸。这样,密封件3的形变范围更大,能封堵住较宽的间隙,密封件3的密封性能更佳。
70.在一个示意性的实施例中,如图9~11所示,保护壳112上还设置有透光窗口1121。透光窗口1121设置在保护壳112的侧面。透光窗口1121能透光。在基座111翻转到保护壳112朝上的状态下,保护壳112的透光窗口1121朝向前方。
71.传感器组件113包括视觉传感器时视觉传感器能透过透光窗口1121采集汽车周围环境图像;传感器组件113包括固体激光雷达时,固体激光雷达所发射的激光能穿过该透光窗口1121。由于在基座111翻转到保护壳112朝上的状态下保护壳112的透光窗口1121朝向前方,视觉传感器和固体激光雷达能朝前探测。
72.在一个示意性的实施例中,透光窗口1121构造为条形窗口,透光窗口1121的相对两端从保护壳112的前侧面分别延伸到与该前侧面相邻的另外两个侧面。
73.这样,透光窗口1121的透光范围更大,固体激光雷达的扫描范围更大,视觉传感器的拍摄范围也能更大。
74.在一个示意性的实施例中,壳体110还包括透光板115。透光板115可以采用透明材料制成,也可以采用半透明材料制成。透光板115覆盖在透光窗口1121上,且密封透光窗口1121。
75.透光板115能防止雨水灰尘从透光窗口1121进入到壳体110内而损坏传感器组件113。
76.在一个示意性的实施例中,如图10、11所示,透光板115上还设置有导水槽1151。导水槽1151向保护壳112内凹陷。导水槽1151构造为条槽,导水槽1151沿透光板115的边缘延伸。导水槽1151可以构造为环形,布满透光板115的边缘。
77.在下雨时,从保护壳115流到透光板115上的水先落入到最上方的导水槽1151中,然后沿着导水槽1151流动到透光板115的底部,即这些水都被导水槽1151引导沿着透光板115的边缘流动,这样,这些水不会影响到传感器组件的探测,同时还能防止透光板115上积水。
78.在一个示意性的实施例中,如图2所示,顶棚21的安装开口211边缘设置有加强筋板221。加强筋板221可以是顶棚21的翻边。加强筋板221从安装开口211的边缘向顶棚21的内侧延伸。加强筋板221可以加强顶棚21在安装开口211附近的结构强度,使得环境感知装
置1能得到更稳固的支撑。
79.加强筋板221上设置有让位槽222。让位槽222供转轴114通过。让位槽222设置在第一支座14与基座111之间,转轴114穿过让位槽222而与第一支座14转动连接。
80.在另一个示意性的实施例中,安装开口211的内壁上涂布有防水涂层。防水涂层与壳体110相抵,防水涂层能封堵壳体110与安装开口211的内壁之间的间隙。
81.防水涂层能防止流体从车身2外通过该间隙而进入到车身2内,例如防止雨水从该间隙进入到车身2内。
82.本技术描述了多个实施例,但是该描述是示例性的,而不是限制性的,并且对于本领域的普通技术人员来说显而易见的是,在本技术所描述的实施例包含的范围内可以有更多的实施例和实现方案。尽管在附图中示出了许多可能的特征组合,并在具体实施方式中进行了讨论,但是所公开的特征的许多其它组合方式也是可能的。除非特意加以限制的情况以外,任何实施例的任何特征或元件可以与任何其它实施例中的任何其他特征或元件结合使用,或可以替代任何其它实施例中的任何其他特征或元件。
83.本技术包括并设想了与本领域普通技术人员已知的特征和元件的组合。本技术已经公开的实施例、特征和元件也可以与任何常规特征或元件组合,以形成由权利要求限定的独特的发明方案。任何实施例的任何特征或元件也可以与来自其它发明方案的特征或元件组合,以形成另一个由权利要求限定的独特的发明方案。因此,应当理解,在本技术中示出和/或讨论的任何特征可以单独地或以任何适当的组合来实现。因此,除了根据所附权利要求及其等同替换所做的限制以外,实施例不受其它限制。此外,可以在所附权利要求的保护范围内进行各种修改和改变。
84.此外,在描述具有代表性的实施例时,说明书可能已经将方法和/或过程呈现为特定的步骤序列。然而,在该方法或过程不依赖于本文所述步骤的特定顺序的程度上,该方法或过程不应限于所述的特定顺序的步骤。如本领域普通技术人员将理解的,其它的步骤顺序也是可能的。因此,说明书中阐述的步骤的特定顺序不应被解释为对权利要求的限制。此外,针对该方法和/或过程的权利要求不应限于按照所写顺序执行它们的步骤,本领域技术人员可以容易地理解,这些顺序可以变化,并且仍然保持在本技术实施例的精神和范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。