1.本发明属于物流分拣设备技术领域,具体涉及一种基于缓和曲线的分拣机轨道及交叉带分拣机。
背景技术:
2.交叉带分拣机主要包括环形交叉分拣机和直线交叉带分拣机,两者均多个分拣小车在轨道上进行循环运行的分拣设备;现有交叉带分拣机的分拣小车通过直轨道与弯轨道的连接处时会产生较大噪声,且运行速度越快,则噪声越大;该噪声显著恶化了物流分拣的工作环境,并降低了分拣机的使用寿命,限制了分拣机的物流分拣效率。
3.该噪声的产生原因在于:现有交叉带分拣机中轨道的弯轨道均采用圆形轨迹,其虽然能够实现分拣小车的方向调整,但是由于圆周运动需要提供一个向心的加速度,而直线运动不存在这个加速度,故分拣小车在直轨道与弯轨道的连接处产生较大的加速度骤变,即分拣小车将受到柔性冲击;柔性冲击导致分拣小车的行走轮在轨道中产生往复振动,进而产生了噪声,并降低分拣小车的运行稳定性。
技术实现要素:
4.本发明的目的在于提供一种基于缓和曲线的分拣机轨道及交叉带分拣机。
5.第一方面,本发明提供一种基于缓和曲线的分拣机轨道,其包括用于改变分拣小车运动方向的弯轨道。弯轨道的两端均设置有过渡段。过渡段的轨迹符合缓和曲线。
6.作为优选,在弯轨道的端部到中间位置的方向上,过渡段的曲率由无穷大开始逐渐减小。
7.作为优选,所述弯轨道还包括圆弧段。两个过渡段与圆弧段的两端分别对接。过渡段与圆弧段在连接处相切。
8.作为优选,所述圆弧段对应的圆心角为60
°
~130
°
。
9.作为优选,所述的缓和曲线的类型为回旋线、多次抛物线或双纽线。
10.作为优选,所述缓和曲线的类型根据弯轨道两端的设计间距确定;设计间距由大至小,依次选择回旋线、双纽线、多次抛物线。
11.作为优选,所述的缓和曲线采用回旋线;以过渡段的外端部(远离弯轨道中间位置的端部)为起点,对应的过渡段的轨迹上任一点的曲率半径r满足关系式r
·
l=a2;其中,l为该点到起点的曲线长度;a为预设的回旋线参数。
12.作为优选,所述回旋线参数a的取值满足以下表达式:其中rs为圆弧段的半径,ls为过渡段的总长度。
13.作为优选,所述的缓和曲线采用三次抛物线。以过渡段的外端部为起点,对应的过渡段的轨迹上任一点的曲率半径r满足关系式r=c/x;其中,x为该点与起点在起点的法平面上的投影距离。c为预设的抛物线参数。
14.作为优选,抛物线参数c的取值满足以下关系式:c=rs·
ls。其中,rs为圆弧段的半
径,ls为过渡段的总长度。
15.作为优选,所述的缓和曲线采用双纽线。以过渡段的外端部为起点,对应的过渡段的轨迹上任一点的曲率半径r满足关系式r=d/a;其中,a为该点到起点的距离;d为预设的双纽线参数。
16.作为优选,两个过渡段直接对接,且两个过渡段在对接处相切。
17.作为优选,所述弯轨道上的两个过渡段相互对称。
18.作为优选,所述的分拣机轨道为直线交叉带分拣机的轨道或环形交叉带分拣机的轨道;直线交叉带分拣机的轨道中,轨道的轨迹在竖直平面内形成环形;在环形交叉带分拣机的轨道中,轨道的轨迹在水平面内形成环形。
19.第二方面,本发明提供一种分拣机,其包括前述的基于缓和曲线的分拣机轨道,以及在分拣机轨道上依次相连并能够循环运行的多个分拣小车。分拣小车能够在指定的下包格口输出货物。
20.本发明具有的有益效果是:
21.本发明在带分拣机轨道的弯轨道两端使用缓和曲线,使得分拣小车在轨道的直轨道与弯轨道的连接处不会出现加速度骤变(使得分拣小车过弯时既无刚性冲击又无柔性冲击),进而克服了分拣小车在直轨道与弯轨道的连接处受到冲击的问题,减小了分拣机的运行噪声,提高了分拣机的运行稳定性。
附图说明
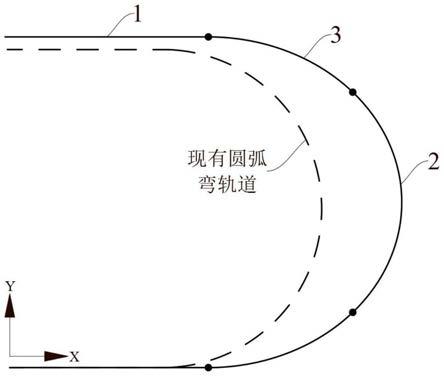
22.图1为本发明实施例1提供的带有过渡段的弯轨道与现有圆弧弯轨道的轨迹对比图。
23.图2为分拣小车通过实施例1提供的带有过渡段的弯轨道与现有圆弧弯轨道的过程中,在水平及竖直方向的加速度变化情况对比图。
24.图3为回旋线、三次抛物线、双纽线的轨迹对比示意图。
具体实施方式
25.以下结合附图对本发明作进一步说明。
26.实施例1
27.一种基于缓和曲线的分拣机轨道,具体用于直线交叉带分拣机;该分拣机轨道包括左右并排设置的两条单侧轨道;两条单侧轨道均包括在竖直平面内依次交替连接形成环形的两条直轨道1和两条弯轨道。分拣机轨道用于支撑和引导在竖直平面的环形轨迹中循环运行的多个分拣小车。
28.如图1所示,两条弯轨道均包括圆弧段2和两个过渡段3。两个过渡段3分别设置在圆弧段2的两端。圆弧段2对应的圆心角为60
°
~130
°
;圆弧段2对应的圆心角越小,则过渡段越长,过渡更平缓;两个过渡段3相互对称,且轨迹均符合缓和曲线。本实施例中,缓和曲线具体为回旋线;从过渡段3远离圆弧段2的端部到连接圆弧段2的端部的方向上,曲率由无穷大开始逐渐减小至圆弧段2的曲率,从而避免分拣小车3在弯轨道出现加速度骤变的情况,减小分拣小车3所受的冲击,以及分拣机的运行噪声。
29.以过渡段3远离圆弧段2的端部为起点,圆弧段2上对应的端部为终点,过渡段3上
任一点的曲率半径r满足关系式r
·
l=a2;其中,l为过渡段3上的当前点(即计算曲率半径的点)到起点的曲线长度(单位为米);a为预设的回旋线参数,本实施例中,其值取1m。
30.回旋线参数a决定回旋线曲率变化的缓急程度,是一个长度量纲。回旋线参数a越大,则曲率变化速度越慢,回旋线变化慢。回旋线参数a越小,则曲率变化速度越快,回旋线变化快。a的取值满足以下表达式:其中rs为圆弧段2的半径,ls为过渡段3的总长度。
31.以过渡段3远离圆弧段2的端部为坐标原点,以直轨道1方向为纵坐标方向建立平面直角坐标系;过渡段3与圆弧段2的连接点的坐标为(x,y);其中,y);其中,
32.分拣小车在现有圆弧线弯轨道与本发明中带有回旋线过渡段3的弯轨道上的加速度变化情况如图2所示(图2中仅为特定条件下测试所得数据);可以看出分拣小车在进入现有圆弧形弯轨道时,竖直方向加速度由零开始发生突变,进而使得分拣小车受到冲击,产生较大噪声;而分拣小车在进入本发明中带有过渡段3的弯轨道时,竖直方向加速度由零开始逐渐增大,且水平加速度呈现缓和增大的状态(先慢后快),使得分拣小车在进入弯轨道时,既无刚性冲击又无柔性冲击,得以平缓地通过弯轨道,进而减小了噪音,提高了分拣小车在弯轨道中的稳定性。
33.实施例2
34.一种基于缓和曲线的分拣机轨道,本实施例与实施例1的区别在于:过渡段3的轨迹不同。本实施例中过渡段3的轨迹符合三次抛物线;以过渡段3远离圆弧段2的端部为坐标原点,以直轨道1方向为纵坐标方向建立平面直角坐标系;过渡段3轨迹的表达式为x、y为过渡段3轨迹的横、纵坐标;c为抛物线参数,本实施例中,c满足以下关系式:c=rs·
ls。其中rs为圆弧段2的半径,ls为过渡段3的总长度。
35.以过渡段3远离圆弧段2的端部为起点,过渡段3的轨迹上任一点的曲率半径r满足关系式r=c/x;横坐标x即过渡段3上的当前点与起点在起点的法平面(垂直于直轨道的竖直平面)上的投影距离。
36.实施例3
37.一种基于缓和曲线的分拣机轨道,本实施例与实施例1的区别在于:过渡段3的轨迹不同。本实施例中过渡段3的轨迹符合双纽线;以过渡段3远离圆弧段2的端部为起点,圆弧段2上对应的端部为终点,过渡段3上任一点的曲率半径r满足关系式r=d/a;其中,a为过渡段3上的当前点到起点的距离(即弦长,单位为米);d为预设的双纽线参数;双纽线参数d越大,则曲率变化速度越慢。
38.在参数相对应的情况下(可以取a2=c=d),回旋曲线、三次抛物线和双纽线在极角较小(5
°
~6
°
)的情况下,几乎一致,故三者均能够在分拣小车进出弯轨道时提供平滑过渡避免冲击;随着极角的增加,三者的曲率半径减小速度为:回旋线>双纽线>三次抛物线;曲率半径减小速度越大,则布置轨道所需要的空间越小,但分拣小车产生跳动的可能性
增大;因此,可以结合分拣机的安装位置实际空间情况在回旋线、双纽线和三次抛物线中选择适合的缓和曲线作为过渡段轨迹。安装位置实际空间越小,则越倾向于选择回旋曲线作为过渡段轨迹;安装位置实际空间越大,则越倾向于选择三次抛物线作为过渡段轨迹;安装位置实际空间适中,则倾向于选择双纽线作为过渡段轨迹。
39.实施例4
40.如图1所示,一种基于缓和曲线的分拣机轨道,具体用于环形交叉带分拣机;该分拣机轨道包括内外并排设置的两条单侧轨道;两条单侧轨道均包括在水平面内依次交替连接形成环形的两条直轨道1和两条弯轨道。分拣机轨道用于支撑和引导在水平面内循环运行的多个分拣小车。两条弯轨道均包括圆弧段2和两个过渡段3。两个过渡段3分别设置在圆弧段2的两端。过渡段3的轨迹符合实施例1-3中任意一项关于缓和曲线的记载。
41.实施例5
42.一种基于缓和曲线的分拣机轨道,本实施例与实施例1-4中任意一项的区别在于:弯轨道中不设圆弧段2,两个过渡段3直接对接。两个过渡段3的连接处相切且曲率半径相同。
43.实施例6
44.一种基于缓和曲线的分拣机轨道,本实施例与实施例1-5中任意一项的区别在于:弯轨道中两个过渡段3不通过圆弧段2连接,而是通过椭圆弧段连接。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。